基于DSP的高速旋转修正机构控制系统硬件设计
2018-09-20张记发郝永平张嘉易赵洪力
张记发,王 玲,郝永平,张嘉易,赵洪力
(1.沈阳理工大学 自动化与电气工程学院,辽宁 沈阳 110159;2.辽沈工业集团有限公司 研发中心,辽宁 沈阳 110159)
随着科学技术的发展,现代战争从对目标的面杀伤逐渐转变为对目标的精确打击,而弹道修正可以在控制成本的情况下大大提高弹药的打击精度和效费比,弹道修正弹越来越受各国的关注[1].各国都在不断加强本国国防力量,抓紧传统炮弹的改造过程,弹道修正弹的研究也成为了诸多国家的军工研发重点.目前,弹道修正弹技术从一维弹道修正发展到二维弹道修正,已取得长足的进步.南京理工大学、北京理工大学等对二维弹道修正弹的修正方法、气动分析以及鸭舵式修正机构等主要技术进行了比较深入的研究,取得了一定成果.沈阳理工大学通过原理性探索与研究,在二维弹道修正机构的设计、修正弹的气动仿真和SINS/GPS(Strapdown Inertialnavigation System/Global Positioning System)组合导航方面取得了一定进展[2].
随着高速旋转弹弹道修正技术的不断发展,舵机作为修正手段与脉冲发动机相比,在修正效果方面具有许多优势,而如何在弹丸飞行过程中对舵机的飞行姿态进行控制是一项重要的研究内容.本文针对修正机构的控制原理、硬件架构、电路问题,提出一种基于DSP(数字信号处理器)主控制器、TMR2303磁传感器、鸭舵式修正机构的控制系统,并进行系统的实验测试.
1 弹道修正控制系统原理
弹道修正控制系统原理在于,通过控制修正舵片的姿态,改变俯仰力矩或偏航力矩,实现弹丸飞行弹道的控制;通过GPS和磁传感器对弹丸的位置信息和舵机滚转姿态进行测量;DSP将采集后解析的状态信息与控制器内预设的弹道对比,根据偏差解算出修正舵机的滚转角度与作用时间,控制舵片姿态达到修正的目的.
GPS信号的长距离精度相对较高,但易受干扰信号影响,且接收机更新速度较慢,因此主要用于飞行轨迹的记录.磁传感器测定的地磁信号更新快,不易受干扰,主要用于修正机构滚转姿态的测定.这两者组合起来可以很好地记录弹丸的弹道和滚转姿态,提高测姿精度[3].
二维弹道修正引信结构如图1所示.它以十字型固定翼鸭舵作为高旋弹弹道修正的实际执行机构,既可保留弹丸的高速旋转属性,又能保证弹丸飞行的稳定性,同时可以利用鸭舵的同向舵和修正舵完成对弹道的二维修正[4].

图1 二维弹道修正引信结构
不同姿态的舵机所受旋转力矩可通过力矩电机来平衡.控制装置通过改变力矩电机的运行状态对舵机的姿态进行实时调整.舵机作为弹道修正的执行机构,通过调整自身位置来控制弹道,进而达到弹道修正的目的.
2 系统硬件结构
由于舵机体积小,载荷较轻,因此系统硬件选型需要满足功耗低、体积小、重量轻、成本低和稳定性高等要求[5].
系统的硬件结构如图2所示.整个控制系统以DSP为核心,采集并处理地磁和GPS信号,通过输出指令来控制修正机构.系统硬件根据功能可主要分为如下三部分:DSP主控模块、地磁信号处理模块和输出控制模块.

图2 系统硬件结构
系统的硬件电路实物如图3所示.3块小板通过软排线相连接,折叠后可放入直径为36 mm的圆柱筒内.与参考文献[3]中提出的直径为80 mm的SINS/GPS组合测姿硬件电路相比,该系统去除了陀螺仪、加速度计等器件,因此其体积更小,结构更简单,成本更低.

图3 系统硬件实物
2.1 DSP主控模块
主控制器作为核心部件,必须具有足够的数据处理能力和控制能力,而且其外设接口要满足需要.
选用Texas Instrument公司DSP处理器中的TMS320F28335作为主控制器.它具有150 MHz的高速处理能力,32位浮点处理单元,串行通信(SCI)、脉宽调制(PWM)等总线接口[6].与定点DSP相比,其速度快、精度高、平均性能提高50%,能够满足修正控制系统的运算要求,而且其外设资源丰富,便于从功能上进行扩展和改进.
为了提高DSP的运行速度,扩大其存储空间,需外扩静态随机存储器(SRAM)和闪存(Flash).SRAM选型为IS61LV51216,其空间容量为8 MB.使用低触发片选引脚(/CE)和输出使能引脚(/OE),可以轻松实现存储器扩展.低触发写入使能引脚(/WE)能够完全控制存储器的写入和读取.Flash选型为SST39VF800A,其存储容量为16 MB,最快访问速度达70 ns.Flash为非易失存储器,存储速度快,可对存储单元进行擦写和再编程,完成数据读写,能够满足本设计的要求.
2.2 地磁信号处理模块
地磁信号处理模块选用江苏多维科技的TMR2303三轴隧道磁电阻(TMR)线性传感器芯片.该芯片采用3个独特的推挽式惠斯通全桥结构设计,每轴惠斯通全桥都可提供差分电压输出.该输出具有良好的温度稳定性,输出信号的峰值可达工作电压的80%,灵敏度高,线性度好,动态范围宽,响应频率高,功耗低,能够满足设计需求[7].
由于采集的地磁信号为弱磁信号,因此需要用信号处理模块对模拟信号进行放大,通过DSP内部AD电路将模拟信号转换为数字信号,进而解析计算.这里采用二级放大电路:第一级为同相运算放大电路(它采用LMV774型来减小信号源内阻,增大输入阻抗,提高共模抑制比);第二级为差分运算放大电路(它也采用LMV772型,可将传感器输出的差分信号转换为单输出信号,通过调节基准源参考电压Vref来抵消失调电压并调节稳定输出).地磁信号处理模块原理如图4所示.

图4 地磁信号处理模块原理图
2.3 输出控制模块
主控制器DSP输出PWM信号,对修正装置(电机)进行控制,通过改变电磁力矩来改变舵片转速与滚转角度,达到修正目的.本文采用东芝TLP116A型光电耦合器对输出信号进行隔离,以保证DSP不受负载电流影响.TLP116A的隔离效果好,传播延迟时间最大值为60 ns,数据传输速率可达20 MB/s.它采用推挽式结构,具有直接对外输出电流的能力,也允许外部的电流通过输入端流向GND.当输入端输入为低电平时,输出为高电平,且其输出电压为电源电压减去内部压降,电流向外流动.当输入端输入为高电平时,输出端与电源隔离,输出为低电平.
3 实验测试及结果
通过锤击实验测试硬件系统的抗过载性.将硬件系统灌封在密闭刚体中,从一定高度自由下落而撞击钢板.经计算,其冲击过载为9.8×104m/s2,恢复上电系统正常,抗过载性良好.
为了验证系统硬件设计的可行性和测试性能,利用实验室卧式高速转台进行测试.测试环境及卧式转台如图5所示.

1、9为伺服电机;2、8为联轴器;3为舵片卡具;4为舵机;5为支架;6为传动杆;7为滑环图5 测试环境及卧式转台
当伺服电机1以力矩模式控制舵片旋转时,通过弹性联轴器2连接舵片卡具3,控制舵片的旋转状态,模拟风阻力矩,舵片按逆时针方向旋转;当伺服电机9以转速模式模拟弹丸转动时,通过弹性联轴器8连接滑环7,经过传动杆6控制弹体旋转状态,按顺时针方向旋转.控制系统硬件在弹体内,当电机1、9分别控制舵机和弹体同时旋转时,通过控制修正电机来控制舵机4的输出力矩,改变舵机4的旋转状态,实现对舵机的修停控制.
对地磁信号处理模块进行调试,在实验转台转速为1 600 r/min时,测得的X轴和Z轴信号(Y轴为旋转轴没有变化)相位相差90°且没有处于截止或饱和状态,调试结果良好,可以进行下一步实验.
后部弹体旋转,舵机保持对地静止状态,利用光电开关检测舵机是否旋转.舵片遮挡光电开关信号,偏移1°可完全打开光信号,使传感器产生脉冲信号.由DSP发出修正指令同时开启定时器,舵机打破静止状态,开始旋转,将光电开关触发信号反馈给DSP,停止计时,同时,定时器记录响应时间(其值为9.5 ms).
根据程序设定,当舵机匀速旋转时进行一次修停,然后解除修停,继续匀速旋转.实验测试结果符合预设目标,在修停时,舵机转速为零,舵片保持在修正位置(角度).通过光电码盘与实际停止角度对比,最大偏差在7.5°左右.测得的舵片角度值存储于DSP中,通过串行通信接口发送到上位机,用Matlab对数据进行处理分析.分析结果与软件程序设定和实际测量结果基本符合(图6).
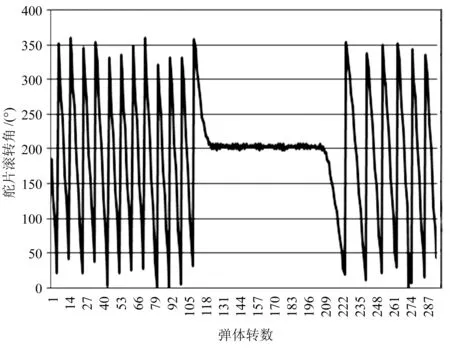
图6 舵机修停时滚转角度
4 结束语
本文基于TMS320F28335 DSP芯片,利用GPS和地磁信号对旋转机构进行姿态解析,设计了一个高速旋转修正控制系统.与以往DSP+FPGA(Field-Programmable Gate Array),GPS+陀螺仪+加速度计的方案相比,该系统的结构简单、成本低、体积小.经过实验测试,其硬件系统稳定,对旋转机构的修正准确,抗过载性能好,具有一定的实用价值.
