基于单片机的自识别象棋机控制系统设计*
2018-09-20
杭州科技职业技术学院机电工程学院 杭州 311402
1 设计背景
象棋作为中国传统文化的一部分,是一种在人们业余休闲生活中极常见的娱乐方式[1]。较多研究机构采用机器视觉作为识别定位棋子的方法[2-5],在考虑研制成本、应用范围、娱乐性和观赏性等方面后,笔者研制了一款基于无线射频识别(RFID)技术的自识别象棋机[6],并在文献[6]的基础上,对自识别象棋机的控制系统进行设计。
2 控制系统电路
控制系统采用STC12C5A60S2单片机对各个模块进行控制[7-8]。集棋模块电路包括一个步进电机驱动器和一个RFID检测模块,用于棋子的收集、分离和检测。摆棋模块电路包括两个步进电机驱动器、两个光电传感器和一个机械卡爪舵机,用于棋子的精确摆放。升降模块电路主要由支撑架、电动推杆和棋面平台组成。电源模块采用LM2596电源芯片,可将24 V输入电压降压为5 V,为单片机供电。控制系统电路框图如图1所示。
2.1 集棋模块电路
▲图1 控制系统电路框图
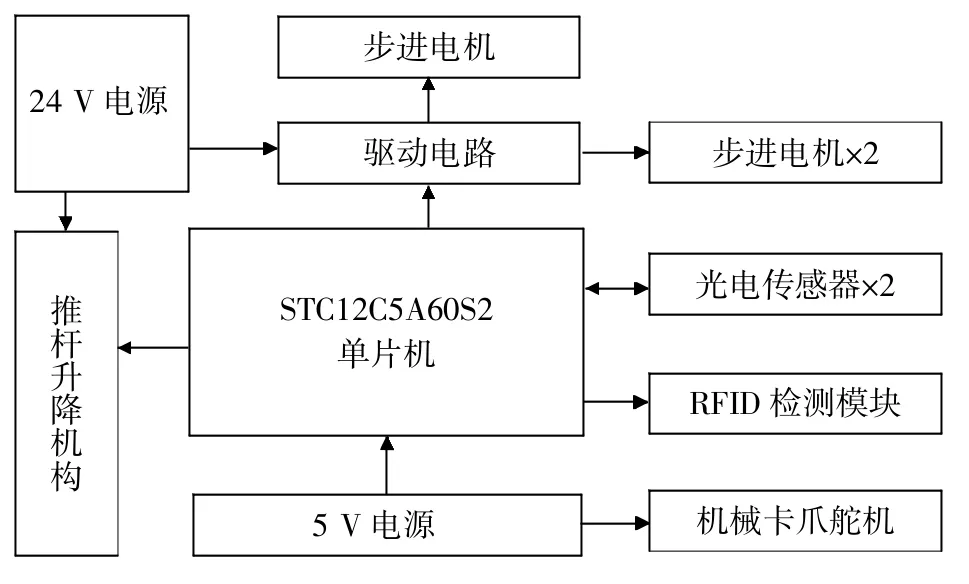
集棋模块电路主要由电机驱动电路和RFID检测电路组成。步进电机驱动器与电机连接比较简单,直接与电机绕组相连即可。电机驱动电路中,步进电机驱动器的CP+控制脉冲信号正极连单片机的P0.4引脚,DIR+方向信号正极连单片机的P0.5引脚[9]。RFID检测电路中,MF-RC522读取芯片有IRQ (中断请求)、NSS(串行数据信号)、SCK(串行时钟)、MOSI(主出从入)、MISO(主入从出)、RST(复位电路)等数据接口,其中:IRQ接口可以不连接;NSS接口与P2.7引脚相连,是进行数据传输时向数据连接线输出数据的接口;SCK接口与P2.6引脚相连,向单片机提供时钟信号;MOSI接口与P2.5引脚相连,实现主器件数据的输出及从器件数据的输入;MISO接口与P2.4引脚相连,实现主器件数据的输入及从器件数据的输出;RST接口与P2.3引脚相连,实现电路复位。集棋模块电路连接如图2所示。
2.2 摆棋模块电路
▲图2 集棋模块电路连接
摆棋模块电路包括三坐标定位机构的两路步进电机驱动电路、两路光电传感器连接电路和舵机连接电路,如图3所示。步进电机驱动器将单片机发出的脉冲信号转换为步进电机的角位移信号,CP+控制脉冲信号正极连单片机P1.3和P1.5引脚,DIR+方向信号正极连单片机P1.4和1.6引脚。舵机转动带动齿轮实现机械卡爪抓取的功能,舵机的信号口与单片机的P0.0引脚相连。光电传感器起限位作用,其中,光电传感器1的信号口与P0.1引脚相连,光电传感器2的信号口与P0.2引脚相连,两者的控制方式为低电平有效。

▲图3 摆棋模块电路连接
2.3 升降模块电路
升降模块电路主要由电动推杆连接电路和直流电机驱动电路组成,如图4所示。直流电机驱动器驱动电动推杆,单片机向直流电机驱动器发送信号。电压从直流电机驱动器A端输出,连接到电动推杆VCC和GND端。单片机的P1.0和P1.1引脚与直流电机驱动器的信号口连接,当P1.0置1、P1.1置0时,电机正转,反之,则电机反转。

▲图4 升降模块电路连接
3 控制系统程序
以RFID识别反馈和单片机控制电机运动为主程序,具体运行过程是:把棋子集入集棋模块,按下启动按钮,在延时10 s后棋面下降;此时棋子分离机构的电机转动,带动凹形轮使一颗棋子落到夹取平台;再通过MF-RC522芯片进行棋子识别,如果棋子被检测到,那么分离机构电机停止转动,否则继续转动;被检测到的棋子被机械卡爪夹取,并由三坐标机构进行摆放,直至32颗棋子摆放完成后,棋面上升。
3.1 集棋模块
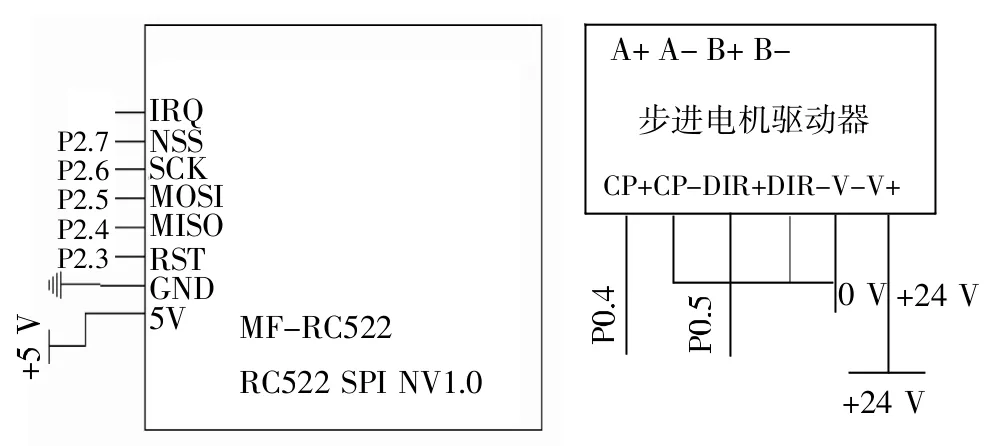
棋子放入集棋机构,步进电机转动,使其中一颗棋子下落到夹取平台。通过MF-RC522芯片对棋子进行身份识别,识别身份反馈给单片机进行信息处理。棋子识别完毕后,电机停止工作,若未识别完成,则电机继续转动。集棋模块程序流程如图5所示。
▲图5 集棋模块程序流程
3.2 摆棋模块
摆棋模块由三坐标定位机构和机械卡爪组成,能够实现棋子抓取与棋子摆放的功能。其中:舵机控制卡爪,然后由三坐标定位机构实现棋子的位移;夹取平台处的检测模块将检测到的棋子信息发至单片机进行识别,之后单片机将脉冲脉冲数据发送至步进电机,使机械卡爪运动到夹取平台处;卡爪夹起棋子,并把棋子抓取至指定位置。摆棋模块程序流程如图6所示。
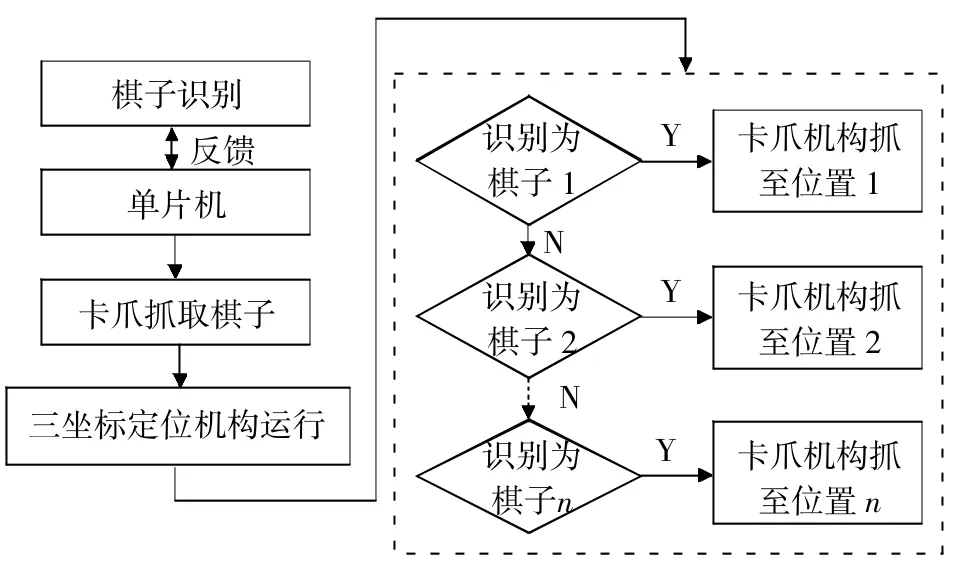
▲图6 摆棋模块程序流程
3.3 升降模块
升降模块由支撑架、电动推杆和升降棋面组成,利用单片机对电动推杆进行控制,实现升降功能。当识别完32颗棋子信号并摆放完成后,将信号反馈给单片机,再由单片机发送信号至直流电机驱动器,使电动推杆上升。下降时,触发启动按钮,并由定时器产生20 ms延时,然后单片机发送信号,使电动推杆下降。升降模块程序流程如图7所示。
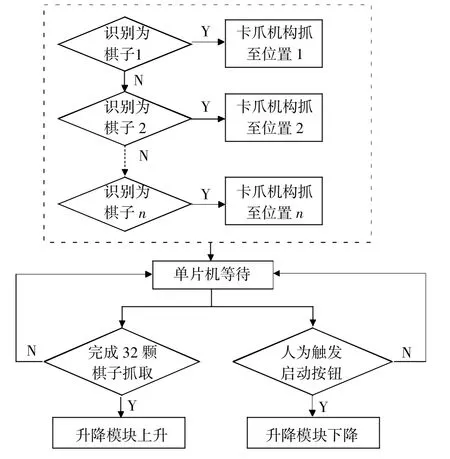
▲图7 升降模块程序流程
4 试验验证
为了验证控制系统的正确性,采用3030铝合金型材搭建了实物模型,进行了大量试验。试验结果表明,自识别象棋机控制系统能按分离棋子(图8)、抓取棋子(图9)、摆放棋子(图10)和升降棋子(图 11)的步骤完成象棋的自动摆放,节省了整理象棋的时间,提高了弈者的兴趣。

▲图8 分离棋子

▲图9 抓取棋子

▲图10 摆放棋子

▲图11 升降棋子