线束激光导引式运输车控制系统的设计*
2018-09-20
青岛理工大学机械与汽车工程学院 山东青岛 266520
1 设计背景
激光导引式运输车不需要铺设导引轨道,以技术优势超越了其它导引运输设备。传统的激光导引式运输车通过行走路径附近的标志反射板接收激光扫描器发射的激光信号[1],从而确定车辆的所在位置,进而完成行走和校正[2]。但激光导引装置安装较为烦琐,作业距离近,工作效率低。针对这一问题,笔者设计了线束激光导引运输车控制系统,可远距离作业,满足车间与车间之间的物料转运。运输车直线输送运动精度高,室内外运行抗干扰能力强,运行速度可以达到2 m/s。
2 控制系统整体方案
2.1 运输车总体布局
笔者结合运输车的运动轨迹和工作模式,并且对比大量常规驱动布置模式[3],将驱动底盘设计方案选定为单动力轮驱动转向[4]和两后轮自由支撑式,整体结构如图1所示。车体由单动力轮牵引行进,两后轮为随动轮,不需要像差速驱动控制那样考虑电机配合的问题[5-8]。整车所实现的动作相对简单,运行可靠,控制容易,造价低。动力轮是集驱动转向于一体的模块,集成了驱动电机、转向电机、限位接近开关、行走编码器、转向电位计、安全制动器、驱动轮等。车体的最前方设置激光位置传感器,车体前方和两侧配有三个障碍传感器,中间部位放置锂电池组,为电机和其它控制器提供直流电源。
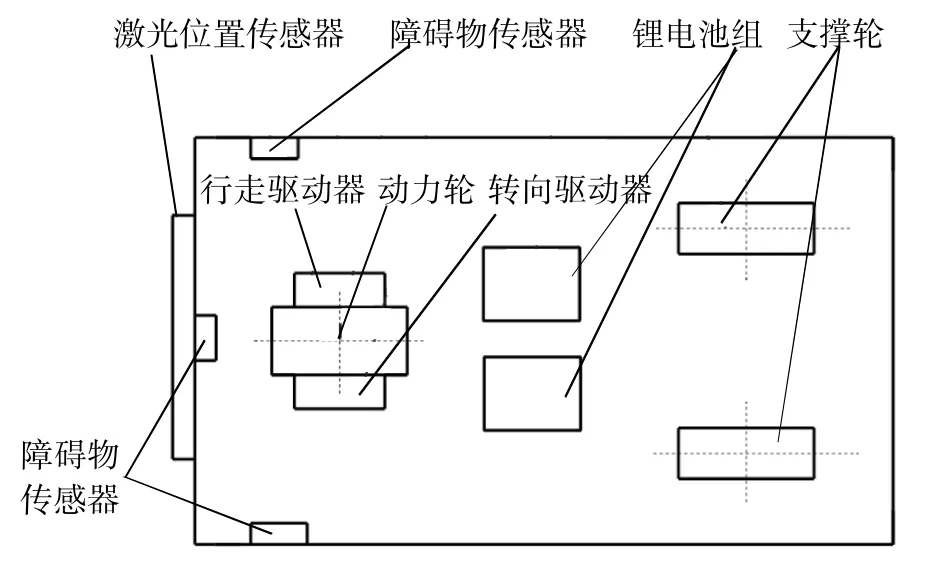
▲图1 运输车整体结构
2.2 控制系统结构

▲图2 控制系统组成
控制系统由可编程序控制器(PLC)[9]、电源管理模块、安全防护模块、动力轮、转向驱动器、激光发射器、激光位置传感器等组成,如图2所示。综合考虑系统所需的数字量和模拟量输入输出点数、扩展能力、电源需求、预留空间、通信功能、编程灵活度等,选定西门子S7-200系列PLC进行控制[10-12]。各种传感器和检测装置的信号传送给PLC处理后,再通过程序梯形图来控制执行部件。触摸屏选择与PLC高度兼容的西门子SMART 700 IE。安全防护模块中设置避障传感器,运输车的最前端边缘处设置机械防撞条,起到防护作用。
2.3 线束激光导引与循迹
实际作业时,运输车前方远距离处预先设置激光发射器并整平,所发出的线束激光沿直线传输,并标记在运输车前端的激光位置传感器上。传感器上横向堆叠布置感光元器件,增大激光响应面积。传感器上的感光点均匀布置,线束激光打到不同的感光点,表示运输车距离预定线路的偏离程度不同。专用电路对传感器检测到的偏离信号进行处理并输入至PLC,经比例积分微分(PID)模块运算处理,结果用来实时判别运输车的当前位置和偏离程度,为控制系统下一步的行走、转向与校正提供决策依据。行走校正如图3所示,图中实线为运输车发生瞬时偏离的状态,虚线为经过控制系统校正完成的状态,此时线束激光标记在位置传感器的中间感光点,说明此阶段运输车行走校正完成。

▲图3 行走校正示意图
3 控制系统硬件
3.1 行走驱动电机参数计算
运输车的行进主要靠行走驱动电机,根据实际作业中运输车的质量、最大载质量及最大行驶速度确定行走驱动电机的设计参数[13],见表1。

表1 行走驱动电机设计参数
具体参数运算如下。
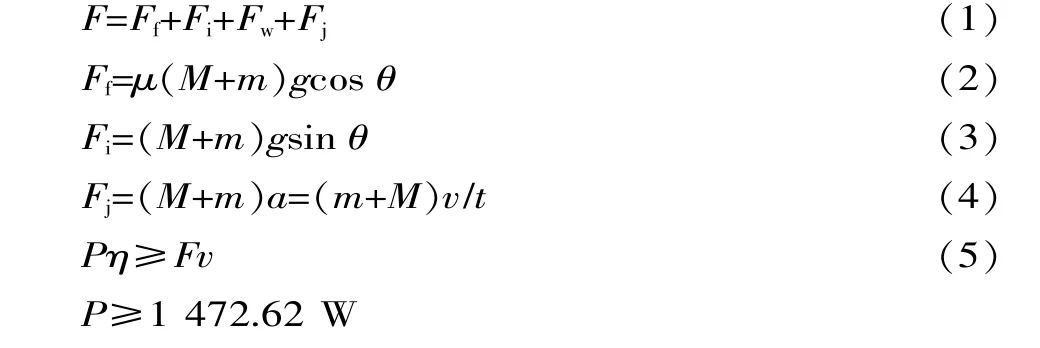
式中:F为运输车总牵引力;Ff为滚动阻力,由轮胎与路面变形引起;Fi为坡度阻力,上坡时与整车前进方向相反,阻碍行驶;Fw为空气阻力,数值较小,可忽略;Fj为惯性阻力,运输车由静止加速到匀速状态时需要克服车重和负载的惯性力;μ为滚动阻力因数,受车速影响较大,资料表明v<50 km/h时变化较小,综合不同路面阻力因数,μ选定为0.02;θ为爬坡角度,取5°;a为运输车加速度;Pη为运输车实际额定牵引功率;P为运输车功率。
结合以上计算和实际工况,选取行走驱动电机为功率1 500 W,转矩为4.8 N·m。动力轮减速精度高,运行平稳,噪声低,各部件安全防护严格,搭配直流无刷驱动器,整体满足设计要求。
3.2 转向电路
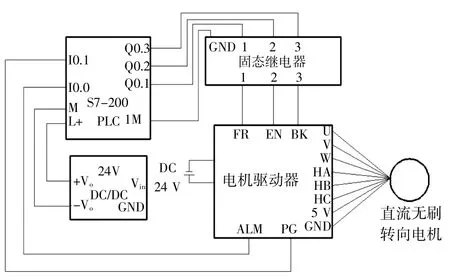
在运输车运行过程中,若动力轮偏离预定直线路径,则通过直流无刷转向电机实时调整控制,由此设计了如图4所示转向电路。运输车采用电池作为能源,电池的电压通常不稳定,在使用时电压会波动,因此设计了直流稳压模块,将电池的电压稳定后再供给 PLC。PLC的Q0.0和 Q0.1接口具有双重输出功能,转向电路使用PLC的Q0.1接口,通过固态继电器连接转向电动机驱动器的FR方向控制信号,从而控制电机的转动方向,PLC与驱动器之间通过固态继电器控制,工作更加可靠,控制功能更容易实现。
▲图4 转向电路
4 控制系统软件
4.1 PLC控制流程图
综合运输车的实际作业功能和PLC的控制特点,采用模块化设计理念,绘制PLC控制流程图,如图5所示。流程图系统初始化主要是对行走驱动执行部件、激光信号、前方障碍物和整机电源进行检测,一旦检测异常,则报警停车重检。运输车主要用于直线运输作业,在转弯时采用其它辅助导引完成,不再赘述。
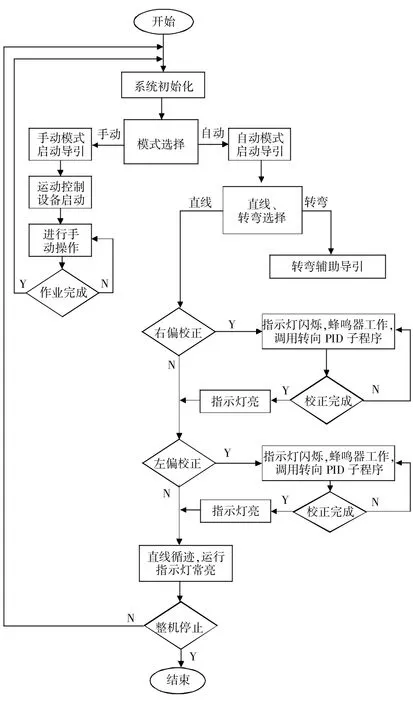
▲图5 PLC控制流程图
4.2 人机交互界面
人机交互界面设计采用WinCC flexible编程软件,具有前瞻性好、专用性强、透明性高、灵活性好的特点。在实际编程时,遵循人机交互界面的友好性原则,统筹兼顾PLC和触摸屏变量地址的一致性,同时保证运行参数的安全性,设置账户级别和参数修改权限[14]。以自动模式为例,最终设计的人机交互界面如图6所示。
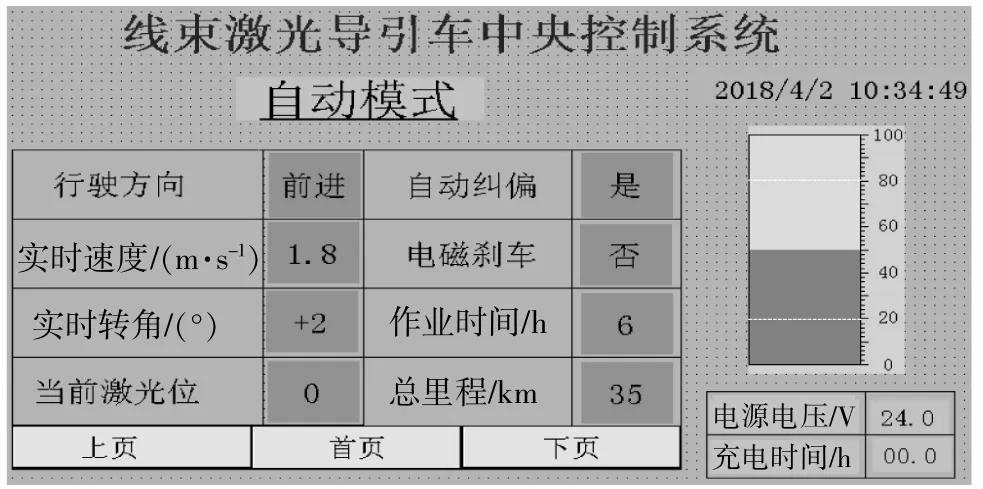
▲图6 人机交互界面设计图
5 试验结果
经过前期控制系统设计,所研制的线束激光导引式运输车试验样机如图7所示。经过试验证明,运输车直线运行平稳,循迹能力良好,精度较高,抗干扰能力强,满足实际作业要求。

▲图7 运输车试验样机
6 结束语
线束激光导引式运输车控制系统通过对动力轮驱动转向一体化单元的合理运用和布置,采用了新型激光导引模式。通过可靠性更高的核心控制器配合触摸屏,实现了运行参数的实时监控和设置,作业模式的转换柔性高,弥补了传统激光导引模式的不足,为高精度远距离工业运输提供了参考。