大型射电望远镜索网中心反射面单元结构的设计
2018-09-20
河北华通通信系统工程有限公司 石家庄 050081
1 设计背景
500 m口径大型球面射电望远镜[1]的研制是国家重大科技基础设施项目,是世界上最大的单口径球面射电望远镜,主要由主动反射面、接收机与终端、馈源支撑、测量与控制等系统组成[2]。
由于馈源舱入港、停靠平台及其设施站位的需要,必须在索网中心预留正五边形空间,同时要求在观测时对正五边形孔进行遮挡,并使其参与反射面的整体变位,因此索网中心反射面单元应具有两个功能[3]:①在馈源舱入港停靠期间,五个反射面单元能够移开,形成馈源舱入港停靠所需的正五边形孔;②在观测时五个反射面单元能够归位,形成具有完整功能和表面精度的反射面单元,参与反射面的整体变位。
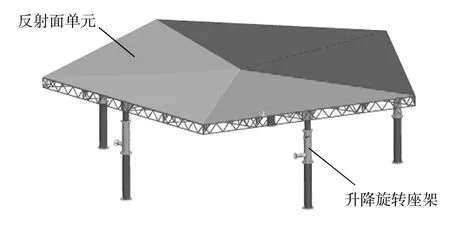
为了满足上述两个功能,采用升降旋转机构,在每块反射面单元的底边中部位置设置升降旋转座架,反射面单元和升降旋转座架共同称为索网中心反射面单元,如图1所示。
索网中心反射面单元设置在主动反射面中心底部的望远镜中心处,反射面在该处留有内切圆直径为16.8 m的正五边形孔,中心安装五块反射面单元,另外还有促动器、立柱、支撑环架、下拉索、工艺滑轮、滑轮支撑装置、牵网等结构。反射面单元覆盖状态如图2所示。

▲图1 索网中心反射面单元
2 索网中心反射面单元组成
在馈源舱入港或离港时,反射面单元采用升降旋转方式,能快速展开和恢复,同时满足简单、可靠、易维护的要求。在反射面单元厚度不超过600 mm的前提下,采用铝合金型材,质量轻,并且有一定的保形能力。

▲图2 反射面单元覆盖状态示意图
索网中心反射面单元升降旋转机构的功能是将各块反射面单元旋转至外侧工作面上部,打开正五边形空间。
索网中心反射面单元主要由升降旋转座架、反射面单元及其它附属设施组成,如图3所示。
▲图3 索网中心反射面单元组成
3 运动原理
索网中心反射面单元的升降旋转座架有两组机构,第一组包括一台升降旋转座架,对应于第五块反射面单元,第二组包括四台升降旋转座架,对应前四块反射面单元。第一组升降旋转座架除了升降高度比第二组的四台高0.6 m外,其它结构和原理完全一致。五台升降旋转座架由统一的伺服控制系统控制,依次准确展开和恢复。升降旋转座架内立柱的末端装有一个滚动轴承,与外立柱的导向槽相配合,使内立柱按既定的方位竖直升降到一定高度后再旋转指定角度。反射面单元布局如图4所示,运动如图5所示,图5中实线为展开,虚线为恢复。
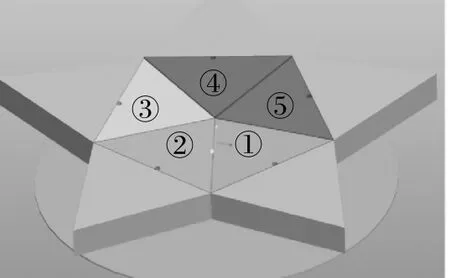
▲图4 反射面单元布局

▲图5 反射面单元运动示意图
4 升降旋转座架设计
4.1 行程计算
升降旋转座架的运动分为直线运动和螺旋运动,根据总体设计,升降立柱需要两种规格,前四块反射面升降的行程一样,第五块反射面升降的行程较长,具体如图6所示。
4.2 结构
升降旋转座架是实现反射面单元升降旋转的主要设备,由固定座和升降旋转立柱等组成。因反射面单元行程的不同,需要配备两种升降旋转座架。前四块反射面行程一致,对应短行程升降旋转座架,第五块反射面对应长行程升降旋转座架。这两种座架结构形式一致,笔者在此主要介绍长行程升降旋转座架。

▲图6 升降旋转座架行程
升降旋转座架是反射面单元展开和恢复的主要运动机构,由外立柱、内立柱、尼龙滑套、对接板、滚动轴承、螺旋升降装置及接近开关等组成,基座通过钢筋混凝土基础与地基相连,外立柱上法兰内侧和螺母外侧装有尼龙滑套,内立柱顶端装有对接板。螺母靠近接近开关时,电机停止转动,避免发生碰撞[4]。升降旋转座架结构如图7所示。

▲图7 升降旋转座架结构
4.3 工作原理
升降工作通过螺旋升降装置实现,具有自锁功能。在外立柱的上法兰中装有尼龙滑套,与内立柱形成上滑动副。在内立柱的末端安装滚动轴承,与外立柱的内壁形成下滑动副,通过上下滑动副实现内立柱轴向的双点定位[5-6]。
在内立柱的末端装有一个滚动轴承,与外立柱的导向槽相配合,使内立柱按既定的方位竖直升降到一定高度后旋转指定角度。
4.4 螺旋升降装置组成及计算
螺旋升降装置由电机、减速机、右旋丝杠螺母副组成,螺母固定在内立柱的底面,工作时,电机转动,驱动减速机带动右旋丝杠旋转,使螺母和内立柱沿着外立柱的内壁上升、下降。当内立柱升降到接近开关位置时,电机断电。
内立柱的最大行程为2 300 mm,速度为4 mm/s。右旋丝杠公称直径为100 mm,导程为16 mm。减速机速比为100∶1。升降旋转座架电机选型计算如下。
(1)电机驱动力矩。螺纹升角φ=arctan[L/(πd2)],L 为导程,L=16 mm,d2为螺纹中径,d2=93 mm,则 φ=arctan[16/(3.14×93)]=3.136°。
当量摩擦角 ρ′=arctan[μs/cos(α/2)],μs为螺旋副摩擦因数,μs=0.08~0.1,α 为螺纹牙形角,α=30°, 则 ρ′=arctan[0.1/cos(α/2)]=5.91°。

式中:Famax为螺旋升降装置承受的最大轴向质量,Famax=2.5 t。
所需的电机输出力矩Tm为:

式中:η1为电机的传动效率为,η1=0.9;i为减速比。
(2)电机功率。电机的输出功率P为:

式中:Vmax为螺旋升降装置的最大速度,Vmax=4 mm/s;k为电机安全因数,k=1.5;η2为螺旋升降装置和电机的传动效率,η2=0.12。
可见,电机功率选择1.5 kW。
(3)电机转速选取1 400 r/min,能满足升降立柱的升降速度要求。
综上所述,电机选用功率为1.5 kW、转速为1 400 r/min的交流电机,防护等级为IP65。
5 反射面单元设计
5.1 整体设计
反射面单元具有特殊结构,如图8所示。依据测量基准点位置为 10 392 mm×12 215mm×10 392 mm,设计如下。

▲图8 反射面单元结构
按照射电望远镜总体设计,索网中心反射面单元形状为五个相同形状的等腰三角形,完全覆盖中心处的正五边形孔。每个反射面单元的一个耳板汇交于一个中心节点,与中心促动器连接。每个反射面单元的另两个耳板与正五边形五个顶点处的节点连接,从而形成完整的反射面单元。这一反射面单元的厚度不应超过550 mm,面板精度均方根值不大于4 mm,满足总体要求。
索网中心反射面单元的展开和恢复采用了刚度、强度十分可靠的旋转方式,机构的承载能力强,所以对反射面单元的质量不需要特别的限制,在确保精度的前提下,尽量减轻质量,采用易于加工、成本低的材质。
5.2 面板结构
反射面单元的面板均采用1 mm厚的冲孔铝板,经压平、裁剪、激光切割、阳极氧化等工艺精加工后组成面板结构[7],面板结构如图9所示。

▲图9 面板结构
5.3 背架结构
反射面单元的背架采用桁架结构,桁架结构均采用T形铝材焊接而成。反射面单元的背架通过力学计算后,最终选择50 mm×50 mm×3 mm T形铝材和25 mm×25 mm×3 mm L形铝材,局部采用 50 mm×50 mm×8 mm T形铝材,焊接成片桁架,再焊接成桁架结构,如图10所示。背架的特点是质量轻、刚度大、易加工、成本低、生产周期短、效率高、可靠性高。

▲图10 背架结构
5.4 力学计算
根据需求,考虑载荷条件下天线的强度和刚度[8]。天线仿真分析采用ANSYS 12.0软件,在模型简化中,将天线作为质量元,忽略反射面的后端部分,即法兰固定端的强度和刚度影响。划分网格时,使用实体单元划分主反射面,使用梁单元划分网格[9-10]。在反射面三个角处加固定边界条件,力学分析如图11~图13所示。
力学计算结果见表1,工况下最大位移满足小于30 mm的要求,最大应力均满足铝材的许用应力要求,安全性较高。

表1 力学计算结果

▲图11 反射面单元位移云图

▲图12 背架压应力云图

▲图13 斜撑杆拉应力云图
6 结论
笔者针对500 m口径大型球面射电望远镜馈源舱入港停靠期间的需求。设计了索网中心反射面单元结构,应用ANSYS软件建立反射面单元的模型,对反射面单元进行了力学分析。结果表明设计符合要求,为后续的生产制造和样机试验提供了依据和指导。
