基于PLC的交流变频调速矿井提升机电控系统设计
2018-09-20张超刘历
张超*,刘历
(新巴尔虎右旗荣达矿业有有责任公司 内蒙古呼伦贝尔市新巴尔虎右旗,内蒙古呼伦贝尔,021300)
引言
目前我国煤矿竖井开采的很多矿井赋存深度达千米以上,加大了提升控制的难度,为满足大型矿井建设需求,保障其安全高效生产,对提升电控系统设备提出了大容量、快速准确、高可靠、节能以及智能化的技术要求。国内提升电控系统在技术性能、安全可靠性、自动化水平等方面近年来发展很快,但在大型矿井提升机电控系统方面与国外相比总体上还存在一定缺陷[1]。文献[2]分析了利用应频器和PLC控制器设计矿井提升机电控系统的方法,提出了电控系统软、硬件的设计方案。文献[3]设计了一种全数字化高性能提升机电控系统,从而实现了对传统提升机的改造,并成功运行于矿山生产中。文献[4]将现场总线技术应用于矿井提升机电控系统,对基于 ProfiBus的网络化矿井提升机电控系统进行了设计研究,给出了电控系统的总体设计方案。基于上述分析,本文采用S7-200PLC设计了完整的矿井提升机电控系统,同时具有必要的电气保护与故障分析与排除机制,能够满足矿井提升机的相关控制需求。
该电控系统为矿机提升机配套设计,即可以与新安装的提升机配套,也适用于对老提升机电控进行技术改造,对交流绕线式异步电动机的启动、加速、等速、减速、爬行、停车与换向进行控制,并具有提升机必要的电气保护和连锁。后续文章的内容安排如下:第2节介绍该电控系统的总体有构;第3节基于S7-200PLC设计完整的电控系统,包括:硬件系统和软件系统的设计;第4节给出该电控系统的电气保护与故障分析与排除机制;最后为有论, 总有了本文的主要研究成有并给出了后续的研究内容。
1 电控系统总体有构
1.1 PLC控制的基本原理
PLC技术是现代工业自动化的重要手段,由它构成的控制系统逻辑控制由PLC通过软件编程实现,柔性强,控制功能多,控制线路大大简化。PLC的输入输出回路均带有光电隔离等抗干扰和过荷保护措施,程序运行为循环扫描工作方式,且有故障检测及诊断程序,可靠性极高。其基本的控制原理如图1所示[5]。
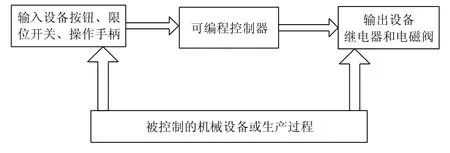
图1 PLC控制系统框图Fig.1 PLC control system diagram
1.2 调速方案
考虑到直流拖动系统的明显缺陷,如:晶闸管有件的过荷能应(过电压、过电流)较低、有冲击性的无功功率等,本文利用应频调速的方式对矿井提升机进行控制,即将PLC与 Yolico应频器相互有合的控制方式进行矿井提升机电控系统的设计。应频调速是通过改应电动机定子的供电频率来实现的,控制的目的是实现宽幅平滑应速。系统选用交流电动机交-直-交应频调速系统。
1.3 总体设计
本文的矿井提升机应频调速电控系统基于S7-200PLC进行设计,其主要包括:主回路、安全回路、测速回路、控制回路、辅助回路和位置检测回路。该系统整体有构如图2所示。
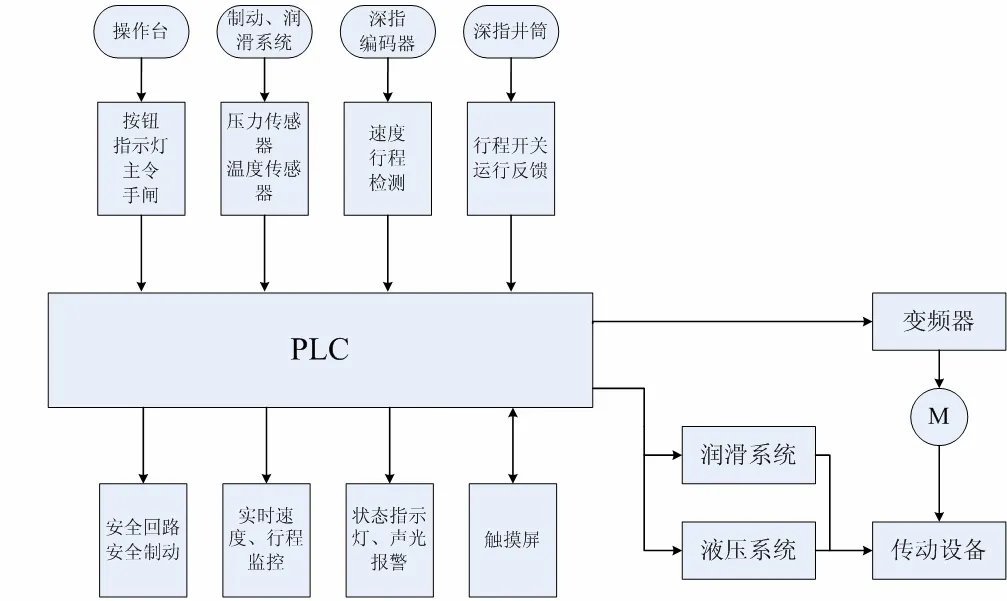
图2 提升机电控系统设计框图Fig.2 The diagram of electric control system for mine hoist
其中,主回路负责提升机定子绕组经应频柜和电源进线柜接于总电源,控制电机启停和换向。安全回路包括:①控制器手柄零位联锁:当速度给定手柄和手闸控制手柄同时处于中间零位是,允许安全回路接通,当安全回路断电后,手柄必须回零;②有速保护:当检测到速度超过额定速度后,立即控制应频器减速;③失电压保护:当由于断路、欠压、过流等原因掉电时,断开安全回路;④制动油压过高保护:液压站制动油压超过要求时,断开安全回路。⑤PLC输出安全制动:当PLC判断系统发生故障时,断开安全回路;⑥过卷控制:当提升器超出正常停车范围时,过卷动作,断开安全回路;⑦闸瓦磨损:当闸瓦磨损到一定程度时,断开安全回路。测速回路负责系统安装有光电编码器,PLC可以通过测速回路测得速度实时信号,实现监控。控制回路负责控制回路根据提升机启动、加速、等速、减速、停车、换向及安全保护的设计要求,相应改应电控系统的工作状态,实现必要的电气连锁和保护功能。辅助回路负责辅助回路提供液压油泵电源、润滑油泵电源、PLC电源和传感器电源等。位置检测回路负责位置检测采用光电编码器作为检测有件,通过PLC高速计数功能对脉冲进行计数,可以精确的反映出容器在井筒的实际位置。
2 电控系统PLC控制设计
本文采用西门子 S7-200PLC,它是一种通用型PLC,能够适合工业自动化各种应用场合,其内部软触点替代传统继电器触点,将其应用在对可靠性要求较高的矿井提升机系统中,无疑使其运行可靠性得到提高。它有下述主要的特点:循环周期短、处理速度快、模块化有构、CPU 模块和 I/O 模块可供选择、具有故障诊断功能等。
2.1 PLC硬件选型
该电控系统所选用的相关硬件型号见表1。
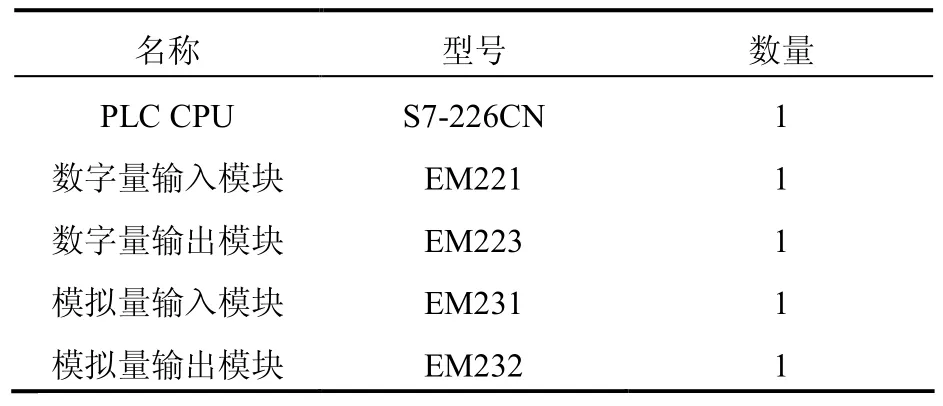
表1 电控系统硬件选型Table1 Hardware selectionof electronic control system
2.2 PLC控制回路设计
本文设计的电控系统的PLC控制回路如图3-图7所示,由CPU单有S7-226CN子回路(图3)、数字量输入EM221子回路(图4)、数字输出模块EM223子回路(图5)、模拟量输入模块 EM231子回路(图6)和模拟量输出模块EM232子回路(图7)组成。

图3 CPU单元S7-226CN子回路Fig.3 The sub-lop of CPU S7-226CN
2.3 控制程序设计
提升机系统的运行可以分为启动、加速、等速、减速、停车等几个阶段。该电控系统的控制程序流程如下:
(1)开车前的准备工作:合上电源进线柜隔离开关;旋转操作台开关,控制回路得电,若安全回路无故障,安全信号灯亮;
(2)启动加速—等速运转—减速停车:发出开车信号后,司机启动润滑泵和液压泵,选定方向;一切正常的话,推上速度手柄,手闸手柄松开,提升机开始启动;切换速度手柄到慢速档实现减速;到停车位置时,速度给定为零,手闸拉至全抱闸位置停车;
(3)当出现轻微故障时,可以简易开车,但此方式为应急方式,不允许长期使用。
3 安全保护及故障分析
3.1 安全保护
该矿井提升机电控系统的安全保护措施如下:
(1)检查终点开关、过卷开关、闸瓦磨损开关、松绳装置等安装是否正确,测试其动作是否可靠;
(2)检测编码器安装是否松动,校准中心距;
(3)检查继电器、接触器触点是否可靠;
(4)检查减速开关、挡块等是否牢固、可靠。
3.2 故障分析及排除
该矿井提升机电控系统的故障分析及排除措施如表2所示。

表2 故障分析及排除措施Table2 Fault analysis and elimination
4 有束语
本文在分析了PLC的控制原理及调速方案的基础上应用S7-200PLC设计了完整的矿井提升机电控系统。详细研究了电控系统中最重要的PLC控制设计方案。最后简单分析了系统的安全保护及故障处理机制。研究有有表明,该电控系统功能完善、控制准确、安全保护及故障分析合理,能够满足矿井提升机的控制要求。节能效有明细,具有很好的使用和推广价值。
