旋翼无人机方舱结构设计
2018-09-19
(天津中翔腾航科技股份有限公司,天津300301)
0 引言
随着旋翼无人机技术的发展,其在工业及生活中的应用越来越广泛,比如在航拍,电力巡线,地图测绘,灾害监测等诸多民用领域取得很好的实际使用效果,并得到了用户的普遍认可。
目前旋翼无人机由于自身特点的局限同时存在一些不足之处,如负载不能过大,巡航时间短等。这给用户带来了不良的使用体验。
为克服这类问题,本文介绍一种专用于旋翼无人机的方舱,该方舱结构适用于无人值守的工作方式,舱门可以自动开启和关闭,无人机可自主降落于方舱内部的平台上,内部设置自动充电装置。当旋翼无人机执行任务返回后可自动充电为再次执行任务做准备。
此方舱配置于偏远地区进行电力巡线可以起到很好的效果。
1 功能分析
多旋翼无人机方舱采用无人值守式[1]的工作方式,其主要工作步骤均为自动化。为实现无人机自主起降,将其功能分解为:舱门自动开启结构,旋翼无人机自动定位平台机构[2]以及平台升降机构[3]。主体框架为钢结构,外围设置太阳能电池板架,安装太阳能电池板,利用太阳能给无人机电池和其它动作部件提供电能。因此方舱主要动力源为电能,其动力装置主要采用电动缸作为动力装置。执行机构采用连杆传动方式,最终实现方舱的所有动作。
在满足功能要求的条件下,对外壳和框架的设计尽量优化。鉴于方舱使用地点均为偏远地区及交通不便的地方,尽量采用简洁设计,方便其组装运输。
2 结构方案的选择
在对方舱功能和使用环境条件定位后,提出以下二种方案实现预设功能。
方案1:如图1,方舱门为向2侧打开,使用电动缸做动力元件,为解决悬空问题在2侧增加辅助支撑轨道。无人机的起降平台的升降也通过置于平台前方的电动缸推动。起降平台上自动点各无人机结构由4根先后动作的推杆执行,无人机降落后由于自身GPS定位误差及风力的影响会偏离中心,推杆设置在有效降落范围处,无人机降落后传动机构使推杆推动无人机定位在平台中央。外形采用框架结构,安装金属板材。
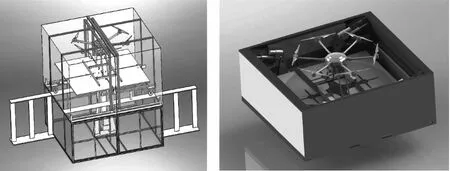
图1 方案1 图2 方案2
方案2:如图2所示,方舱门向2侧打开嵌入舱体内部通过电动推杆和连杆机构实现。无人机平台升降改为剪叉式升降机构,以减少方舱整体高度。无人机定位机构采用推杆式,传动方式改为在平台侧边安装线性模组作为动力源,推杆另一端辅助滚动支撑,短推杆安装在长推杆上做跟随动作,在长推杆定位后短推杆动作,使无人机定位到平台中心。
3 结构设计步骤
经分析,方案2要优于方案1,选择方案2做进一步研究。在初步构思并实际调研考察一些相关数据后,利用单位模型软件建立原始机构模型,反复进行模拟在SolidWorks中建立零件模型,进一步细化后制作其实体模型。初步设定此方舱的大小(长×宽×高)为2000 mm×2000 mm×1100 mm。主要模块组件为无人机平台,举升机构,以及舱门开闭机构。
如图3所示为方舱机械结构整体图,图4所示为带有太阳能电池板附件结构图。

图3 方舱机械结构 图4 带有太阳能电池板附件结构图
舱门向2侧打开分三级通过电动推杆带动连杆机构实现,电动推杆铰接在固定板上。支架固定在支座上面2侧直接支撑部分舱门。通过电路程序控制电动推杆实现方舱门的自动开启和关闭。举升机构采用电动缸为动力源的剪叉举升机构,当舱门打开后举升机构举升平台到方舱口处,辅助无人机的起飞与降落[4]。
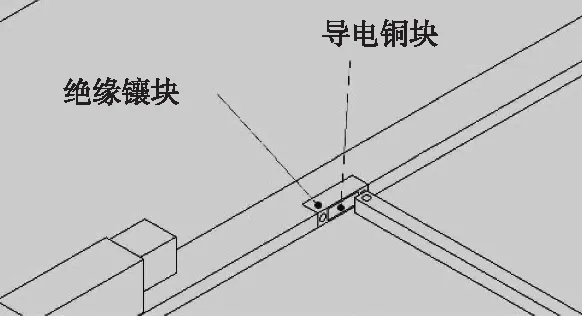
图5 自动充电结构
自动充电结构如图5,在无人机的长推杆与无人机脚架接触面设置导电铜块结构,通过程序控制线性模组使长推杆和脚架接触面产生接触压力,通过铜的面接触接通充电线路,从而完成无人机的自主充电。
主箱体其它的空间放置其它相关附件及电气元器件和储能电池。
4 主要部件有限元分析
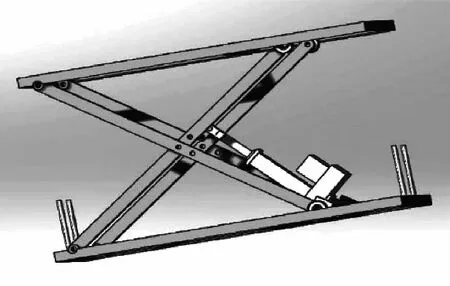
图6 剪叉式升降结构
剪叉式升降结构,由于承受起降平台和无人机及定位组件的重量,因此剪叉片成为方舱主要功能的关键部件,其结构形式如图6。
电动缸作为动力源推动剪叉片,实现平台的升降。在此过程中剪叉片为主要承载负载的元件。
采用工程分析软件ANSYS来模拟剪叉片的受载情况,对其进行强度分析,从而确定设计是否合理,及时发现设计缺陷。
剪叉片的材料确定为Q235,其屈服强度为235 MPa,泊松比μ=0.33,弹性模量E=210 GPa。对其用工程分析软件建模并定义材料属性。采用Solid185单元对剪叉片进行网格划分。按照其运动形式左端固定铰接点为约束处,右端支撑负载,换算后负载对右端铰接点的压力为F=250 N,施加约束和载荷。经过求解得到应力分布图,如图7。
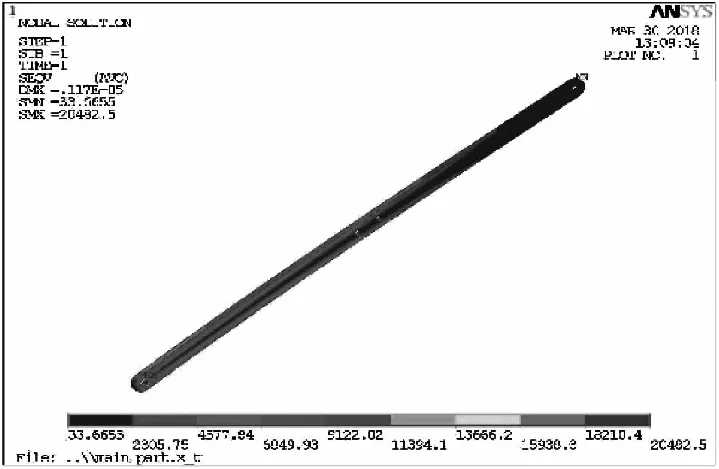
图7 应力分布
根据结果分析可知,剪叉片最大受力为20482.5 Pa远小于Q235的屈服强度。变形量为0.00117mm,符合要求。
5 结论
1)该产品由我公司自主构思设计研发的产品,可以实现无人机自主起降和充电,扩展了无人机使用范围,并且实现无人值守。
2)设计出一整套运动机械结构和完整的电路模块。包括曲柄滑块机构,连杆机构和剪叉机构。
3)此方舱的设计能够达到预期效果,运行稳定,结构可优化以增大空间。
