迭代学习控制在某机械系统中的应用研究
2018-09-19
(贵州省机械工业学校,贵州贵阳550004)
0 引言
迭代学习控制算法的最初是由日本的Arimoto学者提出的一种智能学习控制方法,这种方法当时主要是为了解决在机器人系统中对于重复轨迹的跟踪问题[1]。从迭代学习控制算法的本质上来说,它其实是一种基于前馈的重复轨迹跟踪控制方法。近几十年来,随着技术的不断推进,迭代学习控制更是由于其不依赖于模型的特性被广泛用于各种控制系统,如机器人系统[2]、过程控制系统[3-4]、随机时滞系统[5-6]等。
迭代学习控制方法之所以对于重复信号能有较好的跟踪性能,是由于它充分利用了系统在过去的一段时间内,对过去的控制信息不断的学习迭代,从中找到一组最适合系统的控制信号。这种方法不需要系统精确的数学模型,因而对于某些具有强非线性、强耦合、难以建模的系统有较高的优势[7-10]。就目前的形式来看,迭代学习控制已经逐渐成为了智能控制领域中一种尤为重要的控制方法,比如在理论分析方面,迭代学习控制算法的鲁棒性和收敛速度等的分析都已经取得了丰富的成果[11-13]。
本文主要是针对某机械伺服系统中,系统跟踪重复的轨迹信号时,由于存在摩擦等非线性扰动的影响,采用传统的线性控制方法(PID),难以准确跟踪参考轨迹的问题,提出了一种带有遗忘因子的PID型改进迭代学习方法,并从理论上给出了系统收敛的条件。最后的仿真结果表明,所提出的这种控制算法有利于系统消除扰动,提高跟踪重复轨迹信号的跟踪精度。
1 问题描述
在某机械系统中,其传动装置主要由电机、驱动器、编码器和负载组成,其动力学模型建立如下:
(1)
其中:θ(t)表示机械系统中负载运动的角位置;ω(t)表示机械系统运动时的角速度;i代表电机的输入电流;J被用来表示机械系统中驱动电机转子转动惯量与负载的转动惯量之和;kt代表电机的力矩常数;Bv表示负载的阻尼系数;f(t,ω)表示系统受到的摩擦力。
根据系统动力学模型,我们可将其写为状态空间方程的形式:
yk=Cxk
(2)

2 控制器设计
针对该带摩擦力扰动的控制系统,我们首先作如下假设:
假设1:对于该机械系统2见公式(2)(以下类同),存在这样一个理想的输入信号ud(t),能够使得系统跟踪上理想的轨迹yd(t)。即:
yd=Cxd
(3)
假设2:对于该机械系统(2),每次迭代开始时的初始状态是一样的。即:
xd(0)=xk(0),k=1,2,3…
(4)
对于系统(2),本文设计了一种带有遗忘因子的PID型改进的迭代学习控制器。之所以在该控制器中引入一个遗忘因子,主要是为了增加系统抑制噪声、初始误差及系统模型波动的鲁棒性[14]。该迭代学习控制器如下:
(5)
3 带遗忘因子的迭代学习控制器的收敛性分析
定理1:对于该机械系统(2),当采用了带有遗忘因子的迭代学习控制器结构如公式(4)所示时,如果能满足条件:

(6)
则当k→∞时,yk(t)→yd(t)(t∈[0,T])。
证明:由系统(2)及控制器(4)可知:

(7)
根据系统(2)及(3),可以得到:
(8)
将(8)式带入等式(7)中,则有:
(9)
对(9)式两边取范数,则有:
(10)

(10)式两端同时乘以e-λt,λ>0则有:
(11)
对(11)上式两端同时取λ范数,这里λ>a0,则有:
(12)
其中:
(13)
根据假设2,我们可以得到如下关系:
(14)
令:
(15)
则:
(16)

(17)
从而根据前面的分析,可知:
(18)
将上式带入,可得:
(19)
则系统的误差:
(20)
当选取一个足够大的常数λ,使得λ满足λ远大于a0时,可以知道:
(21)
因此,定理得证。
4 仿真研究
对于如公式(1)所示的机械系统,它的模型参数如下:
J=0.03 kg·cm2,B=0.98,kt=28.89 N·m
其中f(t,ω),这里近似引入白噪声来代替。系统跟踪的轨迹为θ=sin(0.5t),采样时间为0.001。对于该机械系统,本文分别针对其设计了两种不同的控制器来进行比较。
1)PID控制器。经过经验试凑,选择PID的参数分别为:比例增益Kp=1185,积分增益Ki=0.85,微分增益Kd=0.5。跟踪结果如图1所示。可以看到采用PID控制器时,系统能够很快收敛,最大误差为0.1987,均方误差为0.0630。
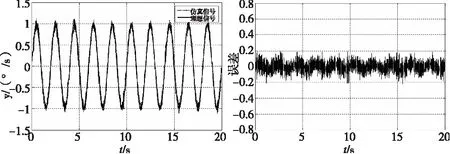
图1 PID控制器跟踪结果
2)带遗忘因子的改进型迭代学习控制器。选择遗忘因子为α=0.5,L=40,Γ=0.4,Ψ=0.01。跟踪结果如图2所示,当迭代次数k≥8时,系统的输出轨迹已经能基本跟上理想信号,且收敛到最小误差后,系统的最大误差为0.0885,均方误差为0.0351。相比传统的PID控制器,系统的跟踪误差减小了一倍以上。这说明所提出的带遗忘因子的迭代学习控制器对带扰动信号的系统,跟踪重复轨迹信号时,有着优秀的跟踪能力。
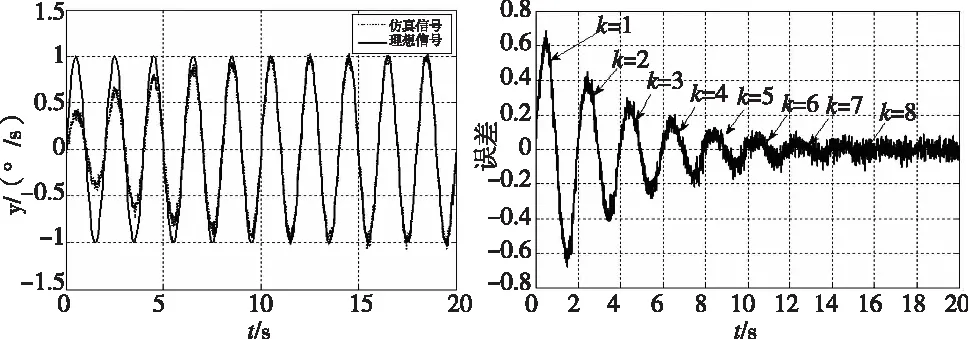
图2 带遗忘因子的改进迭代学习控制器跟踪结果
对比两种控制器的跟踪结果,可以发现,PID控制器收敛到最小误差所需的时间较短,而相比传统的PID控制器,带有遗忘因子的改性迭代学习控制器的需要迭代到第8次以上,系统能收敛到最小误差。但是,从系统跟踪的精度来看,采用带有遗忘因子的改进迭代学习控制器时,系统的误差减小了一倍以上。这说明所提出的带遗忘因子的迭代学习控制器对带扰动信号的系统,跟踪重复轨迹信号时,有着优秀的跟踪能力。

表1两种控制器跟踪误差
5 结论
针对带有未知扰动的某机械系统,提出了一种带有遗忘因子的PID型改进迭代学习控制器。并给出了该机械系统达到最优控制信号的收敛条件。通过与传统的PID控制器数值仿真对比,证实了所提出的带有遗忘因子的改进迭代学习控制器对于该机械系统有着较好控制性能,系统的误差最大值及均方值均减小了一倍,提高了系统的跟踪精度。下一步计划将该种控制器用于实际的控制系统并进行试验研究。
