基于双频RTK测量系统的平面控制网测量
2018-09-18柴文彦
柴文彦
(阳煤集团安泽登茂通煤业有限公司, 山西 阳泉 045000)
引言
在实际的测量工作进行中,地面控制系统会存在不同程度的破坏。而破坏之后的测量系统很难满足矿区的测量精度要求,同时井田范围内的地形地貌也发生了较大程度的变化。为有效保证测量工作的高效精确的进行,需要对矿井的出压煤量做出较为准确的计算。基于此工程现状,某煤矿对其矿井的平面控制网进行了重新的布置,对井田的地形图按照1∶3000的比例进行了重新测量。由于陀螺经纬仪在测量过程中不会受到地球磁场及外部气候环境的影响,因此可以根据实际需要确定目标的位置,同时借助陀螺经纬仪对地质环境进行了偏心观测。
1 测量系统组成及工作原理
1.1 系统组成
双频RTK系统由基准站、流动站及通讯系统组成[1]。基准站主要包含数据发射台、双频接收器、电源、GPS天线、电台天线及支架等部分。移动站主要包含电台天线、GPS天线、双频接收器、数字信号接收器及电源、支架等组成,同时还包含多RTK收集到的数据通过掌上控制器进行分析汇总,同时还包含对中杆等附属装置。
1.2 工作原理
RTK测量系统是一种以载波相位为测量依据的GPS测量技术,它的测量过程属于实时动态测量[2]。基本工作原理为:基准站将接收到的卫星信号(包括测量伪距及载波相位测量值)和基准站的基本信息(包括基准站的坐标,GPS天线高度等)都通过RTK测量系统传送到移动站,移动站不仅需要接收卫星传送的数据,同时还需要接收基准站传送的数据。当移动站的数据进行初始化操作之后,可以将其接收的数据信息传送至电脑的信息控制器内进行后续操作。收集的数据可以进行实时求解,得出两个测量点之间的基础数据,通过两个站上的GPS观测值用on the fly算法计算载波的整周模糊度,再由一定的相对定位数学模型计算出移动站所在点的精确坐标及各种精度指标。此项操作对于接收器有较高的要求,通常情况下RTK系统的测量精度可以精确到厘米级。
2 测量方法
2.1 基准站选择
由于GPS卫星发射器位于距离地表约为两万公里的高空中,因此,卫星发出的信号会受到大气中对流层及电离层的干扰[3]。最终导致地面基准站接收到的信号仅有50~180 dB。如果需要在发射的无线电波中寻找到需要的GPS信号数据,需要保证基准站远离容易产生电磁干扰的电子设备,常见的干扰设备包括电视台、微波站、变电站及信号发射塔等无线电子设备。此外,当基准站周围存在较多反射物时也会对测量的精度产生影响。
根据测量地区的相关地质资料,测量范围内共设置五个平面控制点,经过实地勘查后结果证明五个平面控制点均能够满足测量精度的需求。五个测点中除水塔点以外都设置有双层铁质标架,为GPS测量造成了极大的困扰。其中,卜村测点附近由于存在居民建筑物遮挡,给测量工作带来了极大的困扰,而昭庆测点由于距离测量位置较远,因此设置其余三个控制点作为基准站。各基准站的控制点建立如下页图1所示。
2.2 移动站设定
如图1所示,在整个测区内共设置26基本测点,其中包含3个高级测点。根据此矿的测量区域要求及后期的绘图精度要求,需要对第一层的平面布置网系统进行布设。根据各测点的设置情况,测点有些位于矿井附近的稻田及公路上,有些位于居民建筑物上。由于矿井的平面布置网属于D级平面网,根据测量规程规定,测点的浇筑可以采用混凝土浇灌模式,测点的基地为普通的标石。

图1 测量目标矿GPS控制网图
2.3 平面测量坐标的确定
已有的GPS测量结果是基于WGS-84体系下的,但目前关于测量数据的精度要求需要依据Beijing-54或测量区域当地的测量标准,因此,测量需要根据测量地区的实际地质情况及相关的测量规范进行坐标系统的转换工作。在静态测量条件下,大多数测量数据的转换需要在后台进行,但RTK的测量方法属于实时数据,在测量过程中需要根据当地的实际坐标情况调整控制器上预先配置的软件处理系统,这一系统可以将测量得到的数据自动转换为用户最终需要的测量结果。
测量区域面积(S)为7.5 km2,选定的测区位于第6区域内的第20带,此区域的中央子午线为117°,平均横坐标值(Xq)为6.5 km,整个区域内的地面标高(H)为35 m。依据测量得到的数据计算投影长度的变形值,具体计算方法为:δ=(0.001 23Xq-此测量值不在±2.5的范围内,小于目前《城市测量规范》中的规定值。由此,本文选用的测区选择的坐标系类型为高斯正形平面直角坐标系,子午线位置的选择仍为117°,水平投影选择的投影平面为黄海的平均海平面。
2.4 控制网的测量方法
在进行野外测量时需要选用6台GPS测量仪同时进行测量工作,观测的方式以同步观测为主、异步观测为辅,整体的测量选择动态的测量方式。由于测量工作需要分时段测量,每次测量的时间间隔基本在50 min左右,在完成规定测量任务的同时应当保证某些边界存在重复测量的情况,测量的限差及精度都应当满足国家相关测量规定的要求。在本次测量过程中,相关参数的测量要求如表1所示。
在测量过程中,由于位于官口及后邵的两个测点处都安装有铁质的双层标架,导致架设GPS进行观测时存在较大的困难。由此,在进行GPS观测工作时,需要依托经纬仪采取偏心观测的观测方法,将观测的距离控制在4 050 m之间,利用高精度测量仪对两点之间的距离进行精确测量,从而得出对应测点的坐标。
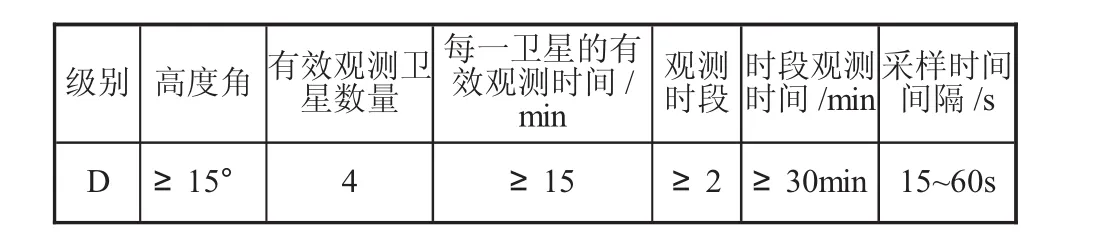
表1 控制网施测标准要求
为保证测量结果的准确性,在测量工作开始前,首先需要根据测量的计划编制对应的测量计划表,在测量前预先对用于测量工作的GPS进行监测监控。同时,在测量的过程中需要根据观测前确定的观测时间间隔进行同步观测,信号接收器需要在每一次观测工作开始前完成设备的静置及预热处理。每次测量结束后需要按照预先设置的测量规定完成各项测量数据的记录工作,同时在测量过程中及时对测量设备的稳定情况进行监测。在每时段完成测量工作之后需要对天线高度分别测量,保证两次天线测量的高度差在3 mm以内,数据处理时选择两次测量数据的平均值作为天线的高度值。
3 测量精度评估标准
根据测量区域的地质环境条件设定的平面控制网系统共包含基线82条,其中长度最长的基线长度可以达到9 300 m,最短的基线长度仅为135 m,整个平面控制系统内的基线平均长度为1 530 m,各基线之间相互交汇共形成75个闭合的环状测量区域。各闭合圈中最大的闭合差为2.7×10-6,最小闭合差为0.05×10-6,各点之间的均方差最大值可达0.063 m,最小均方差值0.062 m。通过对测量得到的数据进行分析汇总后可知处理之后二维平差的最大精确度可达到1/58 363,最小的精确度可以达到1/1 113 172 153,这些测量值都能够满足测量规范要求。测量过程中对高程值的处理主要为二次曲面拟合,但由于通过GPS测量得到的高程值精度较低,同时测量区域存在高程异常的情况,因此,此次测量工作得到的高程值不能作为施工指导数据,仅能作为参考。
4 结论
1)在测量过程中将双频RTK系统于高精度陀螺经纬仪结合进行测量工作,通过高精度经纬仪的测量有效解决了测量过程中的偏心问题及已知基站数据不完善等问题,有效提高了测量的精度及测量效率。
2)GPS测量技术具有测量效率高、自动化程度高、测量精度高及工作时间较长等特点,同时在测量的过程中不会被外部环境因素及测量区域内的障碍物干扰。有效节省了野外测量的工作时间,同时配备有专用的数据处理软件,在提高测量精度的同时有效增加测量的效率。