日本KITE试验任务综述与启示
2018-09-18张烽王小锭吴胜宝焉宁李扬
张烽,王小锭,吴胜宝,焉宁,李扬
(中国运载火箭技术研究院研究发展中心,北京100076)
1 概述
2016年12月,日本成功发射的HTV货运飞船 (也称鹳号货运飞船)6号机抵达国际空间站,此次任务携带电动力绳系装置,在完成主任务后,将在太空释放系绳以对该电动力绳系技术进行在轨测试,此次在轨演示任务被称为 “鹳号集成系绳试验” (Konotori Integrated Tether Experiment,KITE)。但根据官方报道,该计划后因绳系释放装置出现故障而中止。尽管并未达到试验目的,但该任务的系统方案与技术路线具有较强的借鉴意义。因此,本文较为详细地介绍了KITE任务的总体方案[1]、系统组成[2]及任务关键技术仿真与地面试验验证情况[3-4],最后总结了该任务在电动力绳系离轨技术发展领域的启示,并对我国开展电动力绳系离轨技术发展思路提出了建议。
2 总体方案
2.1 演示方案
日本此次KITE任务的主要目的是验证应用于空间碎片清除的电动力绳系关键技术,主要包括以下试验内容:
(1)释放约700m长的裸系绳;
(2)绳系和末端运动状态监测;
(3)电动力产生试验;
(4)裸系绳电荷收集试验;
(5)电子发射器阴极电荷发射试验;
(6)力的测量试验。
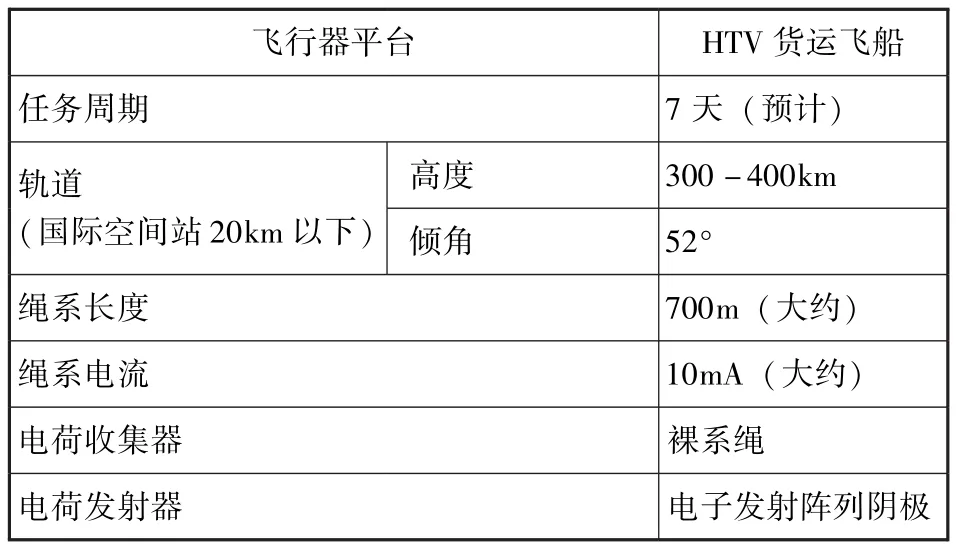
表1 KITE任务技术指标Tab.1 The specifications of the KITE mission

图1 KITE任务原理示意图Fig.1 The schematic of the KITE mission
整个试验任务流程如下:
HTV货运飞船完成向国际空间站的任务并分离后,降低到国际空间站轨道20km以下。绳系末端由安装在HTV上的弹射装置弹射出来,绳系末端中安装约700m长度绳系的卷轴,绳系另一端连接HTV。绳系从卷轴缓慢释放展开,展开过程的摩擦力有效降低末端的释放速度,但经过足够长的时间后,重力梯度力还是使绳系的展开速度加快,制动卷轴安装在绳系末端,以此来降低绳系展开速度,这样避免绳系释放完毕时绳张力过大对绳系造成破坏。
由于科氏力以及电动力和大气阻力产生的扭矩影响,绳系会产生明显的振动。这种摩擦力和绳系振动状态在地面试验无法验证,需要在轨进行验证测试。绳系释放展开的动力学特性通过HTV上的交会雷达来测量,该雷达也用于与国际空间站的交会对接,在绳系末端只要安装发射器即可完成测量,而不需要任何电子设备。HTV上同时安装了视觉相机来监测绳系释放展开的过程。此次任务中,采用电子发射阵列阴极来发射绳系收集的电子,通过等离子电压监测器来测量绳系电压,通过地磁传感器来测量地磁场。这些部件的供电和通信都是利用HTV上的设备完成。当绳系释放完成后,开始测量绳系电压、电流和电子场阵列发射控制的关系。此次任务计划持续7天,任务完成后,绳系将被切断,HTV按计划进行再入过程。
考虑电动力的方向以及电子发射器安装在HTV的位置,绳系选择朝天顶方向释放。绳系700m长度设计是满足电动力指标需求以及受激光传感器指标限制,激光传感器用来测量HTV和末端的距离。
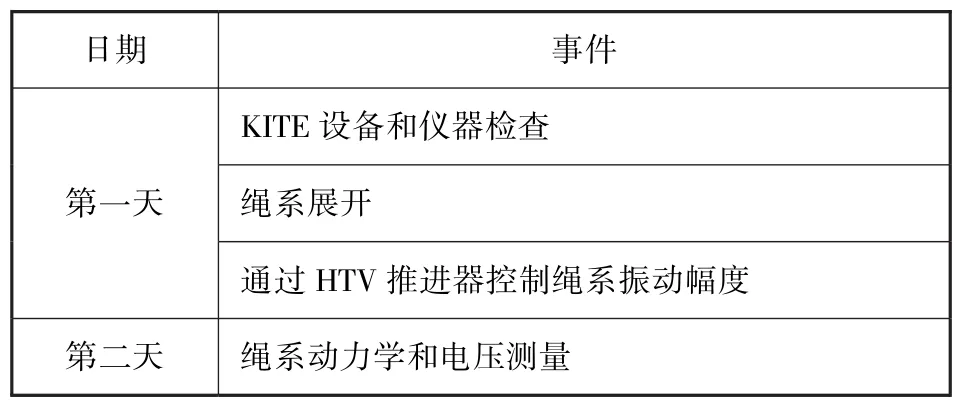
表2 KITE任务日程安排Tab.2 The time schedule of the KITE mission
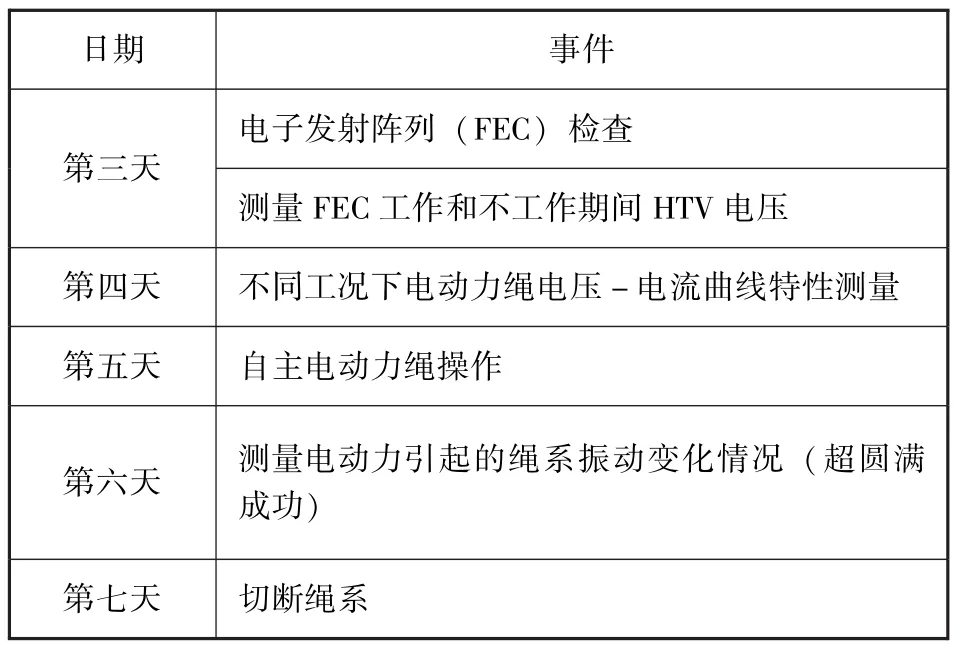
续表2
2.2 日本电动力绳系碎片清除发展规划
日本利用电动力绳进行空间碎片清除的技术路线如图2所示。路线图分三步走:第一步,关键技术验证;第二步,系统级验证;第三步,空间碎片清除应用。系统级验证任务剖面如图3所示。最终目标是通过保护空间环境的国际合作,发展一种经济有效的空间碎片清除系统。
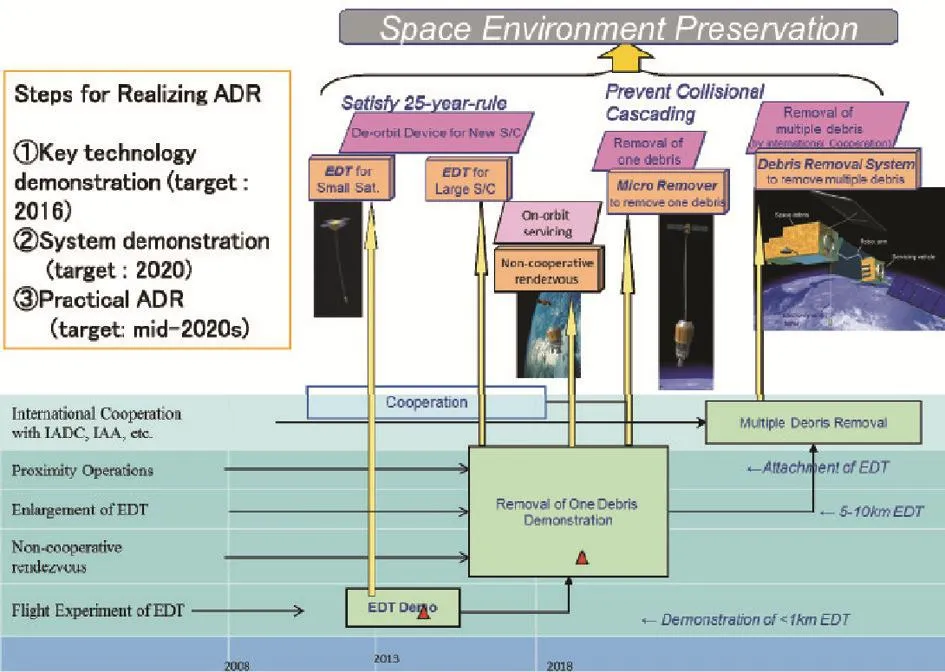
图2 基于电动力绳的空间碎片清除的技术路线图Fig.2 Roadmap for EDT based space debris removal
若电动力绳系被验证能够用于碎片离轨,和传统的动力系统相比,电动力绳系离轨过程挑战性要小。而且采用电动力绳不需要太多燃料,这样可将小卫星应用于碎片清除系统。所以,日本规划实现碎片清除系统的路线图第一步是发展电动力绳系技术,路线图的下一步则是发展用小卫星来清除大质量碎片的技术。如果第一步 (电动力绳系技术)得到验证,后续将进行碎片清除系统的系统级验证。日本同时在开展的还有非合作目标的交会对接和近距离操作技术,如运动状态估计、绳系末端和目标的连接操作等。
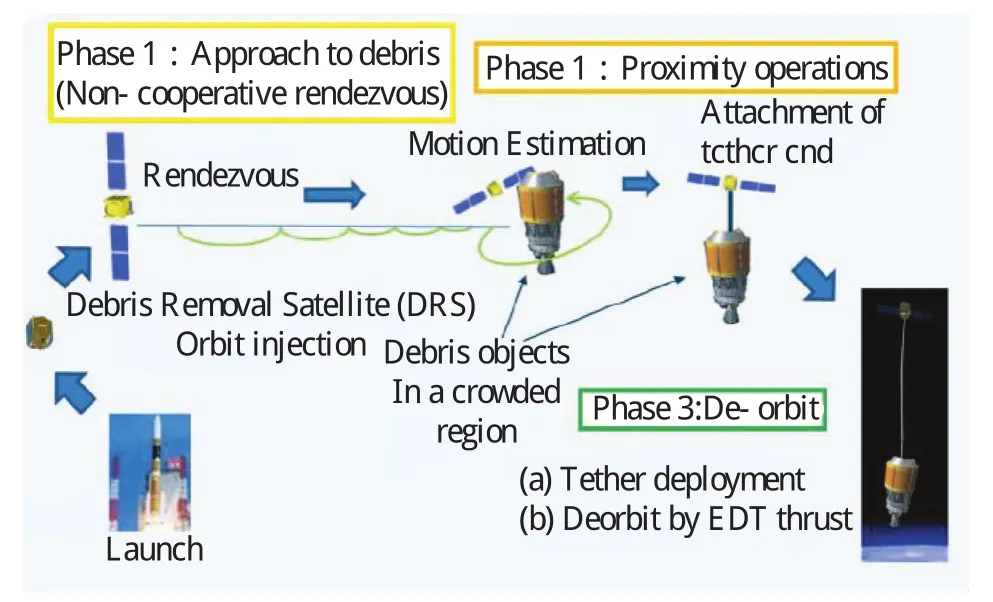
图3 电动力绳系碎片清除技术系统级验证任务剖面图Fig.3 Demonstration mission profile of EDT based space debris removal technology
在系统级验证方面,日本规划的方案是在运载火箭发射小卫星后,由小卫星将火箭末级作为清除的对象。这个小卫星在和火箭分离后,与火箭交会并接近,然后将绳系一端和火箭连接,小卫星自身作为绳系末端,将火箭末级拖曳离轨。这种小卫星将是未来碎片清除实践应用最终目标的一种方式,会大大降低碎片清除成本。
3 系统组成
KITE的装置和工具安装在HTV上面的各个部位,具体如图4所示。KITE的主要部分包括用于加速和减速制动的绳系和卷轴、末端、释放绳系机械装置、记录绳系动力学特征的传感器和相机、电子发射器、电势感应器、磁传感器和数据处理控制单元。
3.1 绳系释放机械臂装置
绳系释放机械装置由末端外部的发射弹簧和一个非爆炸弹射装置组成。释放过程由3个单独的控制指令发出,配置3个单独发出的控制指令是为了保证HTV飞行器的安全。释放装置弹射末端的初速度在1m/s左右。
3.2 绳系和卷轴
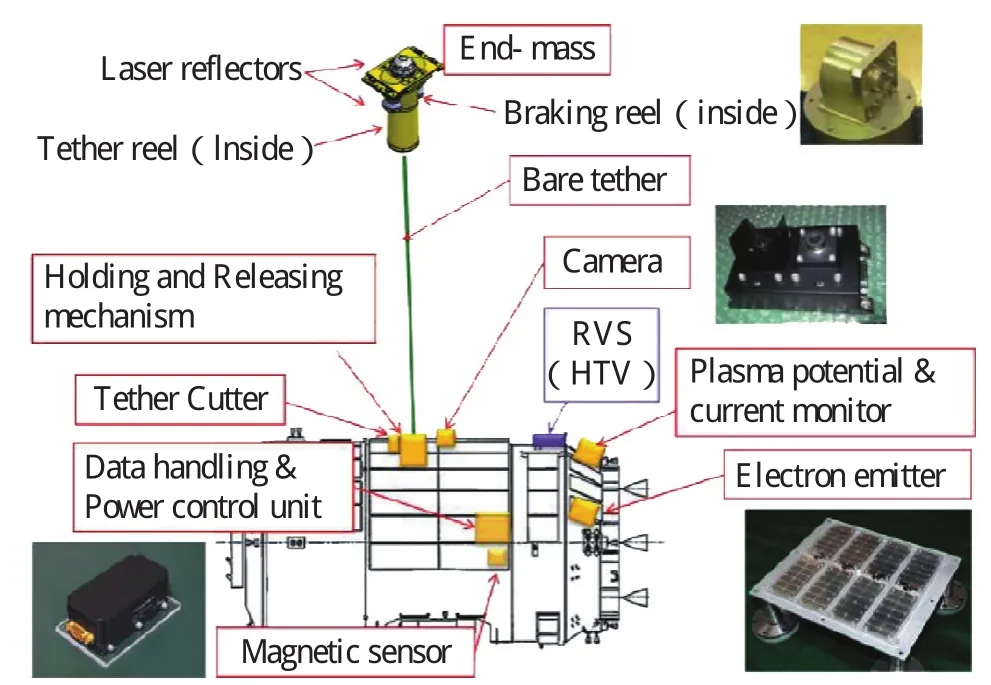
图4 KITE任务系统组成图Fig.4 The system components of the KITE mission
KITE绳系采用裸系绳,主要任务是从周围等离子区吸收电子,绳系上电子流动产生电动势,切割磁感线产生洛伦兹力。绳系总长度大约700m,且采用网状结构,由3条线组成,每条线由铝和不锈钢组成。裸系绳收集空间等离子电荷,采用网状结构来应对小碎片的影响。其实物结构及微观结构参见图5。
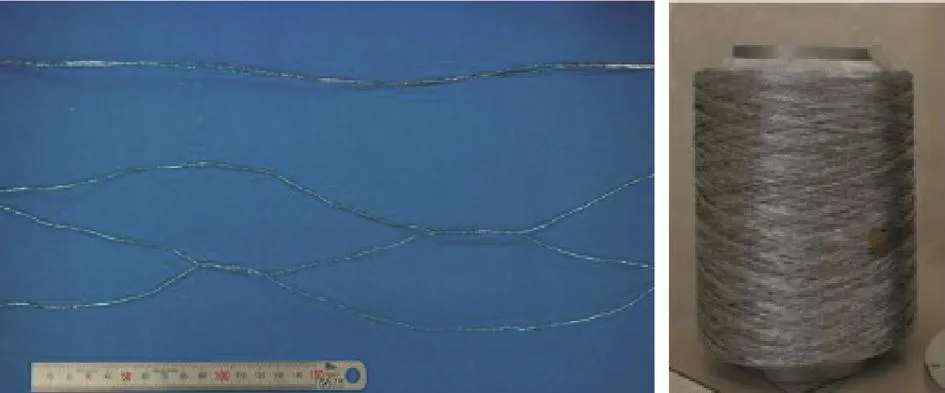
图5 网状绳系和卷轴Fig.5 The net tether and the reel
存储和释放系统由末端、末端存储装置和弹射装置组成。当压缩的弹簧被释放后,末端便离开HTV飞行器,绳子从末端的卷轴中逐渐伸出。在绳系展开的最后阶段,末端通过制动卷轴开始减速,保证展开的最后阶段不会出现过多的振荡或者回弹现象。
制动卷轴放置在末端中,绳系的最后10m卷绕在制动装置的卷轴上。这种被动制动系统无法调节制动力,优点是简单易行。制动力只能通过不同力的内部弹簧来改变,且大小必须通过地面测试来估计。
3.3 传感器和相机
末端质量块的运动通过HTV的交会传感器来监测,该交会传感器主要用于HTV与国际空间站的交会对接过程。为便于实施监测,需要在末端质量块安装激光反射器来配合。
两个相机,包括EECMR和TSCMR,安装在HTV上,EECMR监视弹射时末端的运动,TSCMR通过绳系上三个标记点运动来监视绳系摆动。

图6 相机监视过程Fig.6 The figures inspected by cameras
3.4 电子场发射阵列
电子阵列发射阴极向空间等离子层发射电子,形成绳系电流,碳纳米管材料用作电子发射器。电子场发射阵列模块安装在HTV的推进器模块上,有助于电子发射与绳系的隔离。电子场发射阵列模块由发射器 (FECH)、控制器 (FECC)和指令器 (FECG)组成。发射器用于向周围环境发射电子,控制器向发射器提供高电压,指令器负责向发射器提供指令。指令器在第三天设备准备好电子发射的时候打开。发射器表面是一个平行的发射极,发射时对准轨道方向,防止发射电子反弹回来造成机壳氧化。

图7 电子场发射阵列模块Fig.7 The sketch of the FEC module
3.5 其它
绳系切断装置 (TCM)和存储释放装置的绳系一端连接,在任务结束后切断绳系,以有利于安全再入。LP-POM测量电压和电动力、发射电流关系,该设计基于ATOTIE-mini,经过了在轨HTV-4验证。磁传感器测量磁场数据来计算电磁力和洛仑兹力。数据处理单元和电源管理单元是KITE的主计算机,负责KITE的部件 (除了TCM和LP-POM)和HTV的接口。
4 关键技术仿真与验证情况
电动力绳在轨释放的动力学特性需要在地面试验及数字仿真中进行验证。在地面试验测试关键参数,包括展开摩擦力和制动力,通过数字仿真分析展开动力学过程。另外,针对任务过程也进行参数推导来验证。
4.1 动力学与控制仿真
4.1.1 动力学模型
系统建模过程中,将绳系视为由粘弹性部段连接的 “珠点”模型,每一个珠点的运动模型如下:
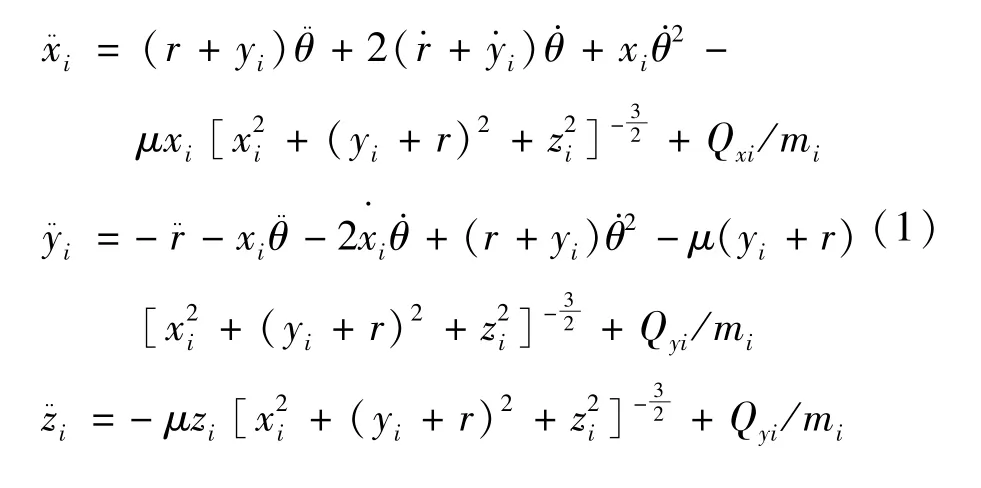
式中,,r,μ为系统轨道角速度、轨道半径及地球重力常数;mi为珠点质量;Q为作用于珠点的广义力。在Gauss形式的轨道摄动方程中,考虑了洛伦兹力、空气阻力及地球位势引起的轨道摄动。绳系的释放通过增加新的珠点来建模模拟。系绳的拉伸模量、阻尼比、释放摩擦力及光热特性等参数通过绳系地面试验进行了测量。
在仿真中,地磁场采用了IGRF2000模型,离子密度采用了IRI2001模型,大气密度采用了NRLMSISE-00模型,地球位势采用了EGM96模型。对于裸系绳的电子收集模型,采用了二维轨道限制理论。仿真同时计算了绳系的温度,因为绳系的自然长度及导热率随着温度的变化而变化。
4.1.2 绳系释放过程仿真
图8(a)给出了释放过程中的绳系动态变化。图8(b)给出了释放过程中及释放后轨道面内天平动摆角变化。末端质量块以1m/s弹射速度沿天顶方向释放,释放方向偏离轨道角速度方向20°,并偏离轨道面11.25°。由于存在Coriolis力,轨道面内天平动角度变动幅度较大。
4.1.3 HTV的俯仰角控制
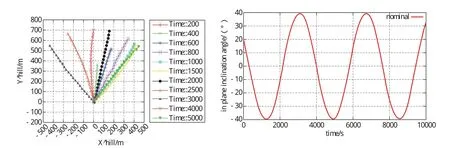
图8 绳系释放过程仿真结果Fig.8 The simulation results of the tether deployment process
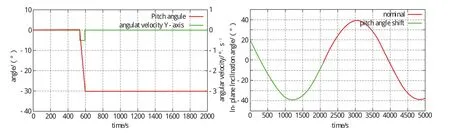
图9 HTV的俯仰角控制仿真结果Fig.9 The simulation results of controlling HTV pitch angle
HTV的交会雷达视场为地平 (azimuth)和高程 (elevation)方向±20°,因此,当绳系天平动幅度超过20°时,末端质量块将会超出交会雷达的视场。为了能够持续测量到末端质量块的位置,需要控制HTV的俯仰角以保证末端质量块在交会雷达的视场中。图9(a)给出了为满足交会雷达视场约束,HTV俯仰角变化30°及角速率满足0.5°/s时,HTV的俯仰角及角速率变化结果。图9(b)对比了HTV采取俯仰机动及没有俯仰机动情况下的绳系轨道面内天平动角度变化结果。绳系足够长,并且通过末端质量块的卷轴机构释放。因此,绳系另一端连接HTV,并不会影响释放过程的动特性。
4.1.4 基于HTV推力的天平动抑制
在测量到绳系天平动运行一段时间后,利用HTV的推力器对其进行抑制。如果采取合适推力序列 (当末端质量块相对于HTV的运动与轨道角速度方向相反,推力应该为相同方向),天平动角度能够减少,如图10所示。在图11(a)中,采用双推力 (dV=0.2m/s)用于减少绳系天平动角度。通过降低和抬高轨道高度,系统的轨道高度能够维持在常值 (如图11(b)所示)。

图10 用于天平动抑制的推力施加序列Fig.10 The force sequence to reject the libration
4.1.5 绳系切断
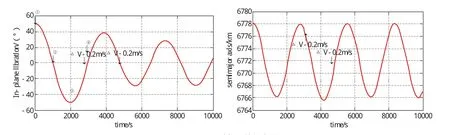
图11 采用天平动抑制的仿真结果Fig.11 The simulation results of the libration attenuation
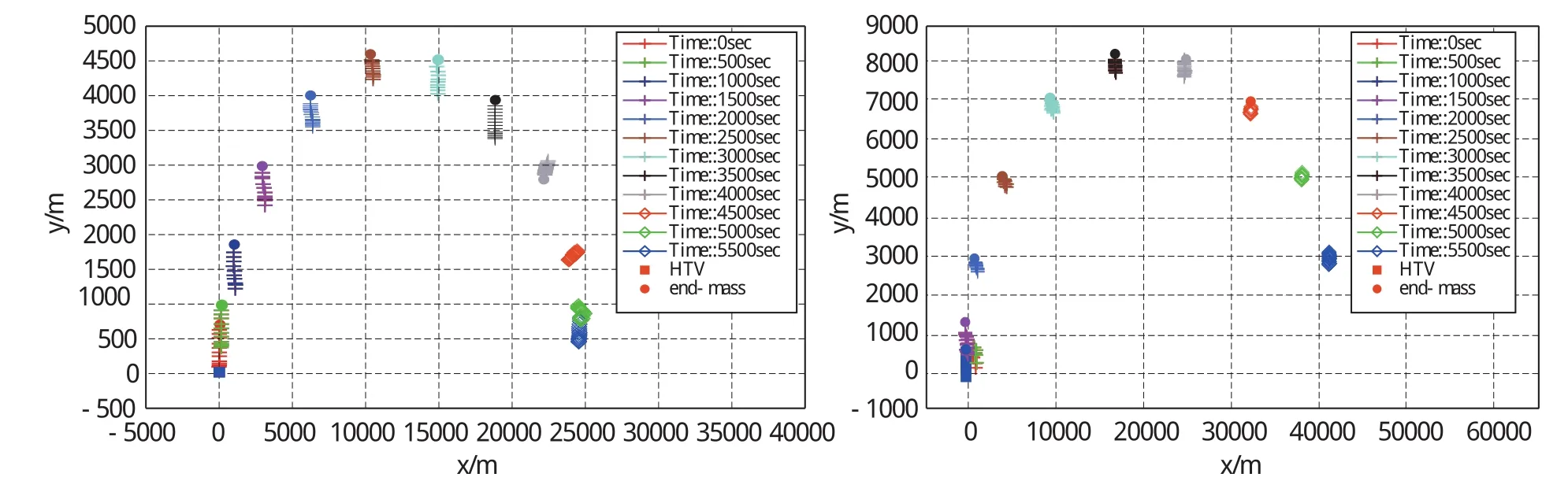
图12 两种情况下绳系被切断时的绳系运动Fig.12 The tether motion after tether cutting in two cases
绳系发生旋转会对HTV的安全再入形成潜在的障碍,因此在KITE任务完成后,HTV再入前应将系绳切断。当绳系切断后,末端质量块和绳系将进入较高的轨道。当绳系在稳定且垂直的条件下被切断,拖着绳系的末端质量块将进入远地点比原来高5km的轨道,如图12(a)所示。而当绳系在天平动的情况下被切断时,末端质量块的轨道远地点将会是两倍,如图12(b)所示。这也是KITE任务在ISS轨道下方20km处进行的原因,为了防止绳系切断时会出现意外。
4.2 地面试验验证情况
4.2.1 释放阻尼地面试验测试
(1)绳系自由落体测试。
绳系自由落体测试用于确定在释放终止和重启时刻的绳系行为。试验配置如图13所示。绳系卷轴悬挂于装置内部,且接口向下,同时与高灵敏度力传感器连接。系绳通过离地1.5m处以自由落体方式释放。
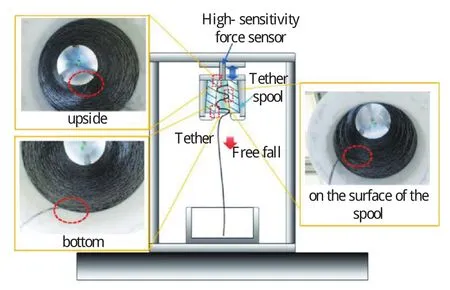
图13 绳系自由落体试验配置Fig.13 The free-falling experiment device
如图14所示,根据仿真结果,1.5m长的绳系拉出后,释放速度约为4-5m/s,预计比KITE任务在轨得到的速度大。
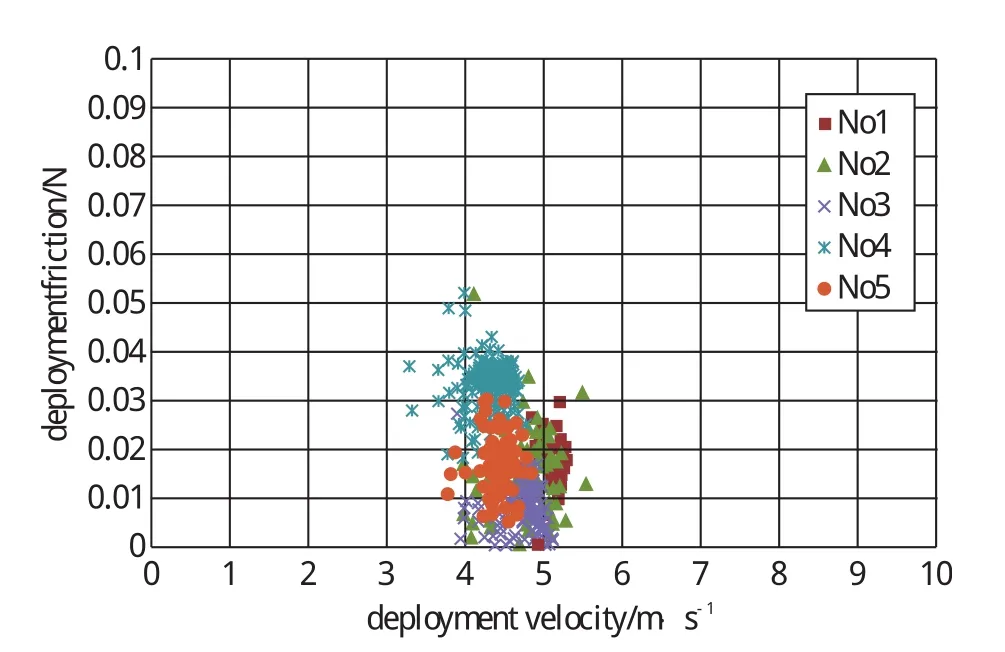
图14 自由落体形式下的绳系释放速度 (5组工况)Fig.14 The tether deployment velocity in the free-falling case
研究发现,如果绳系发生卡顿,绳系释放会终止。通过对绳系施加足够的张力,可以重新开始释放。所施加的张力需要大于释放摩擦力。在地面试验中,所测得用于重新释放绳系的最大张力为0.24N,如图15所示。
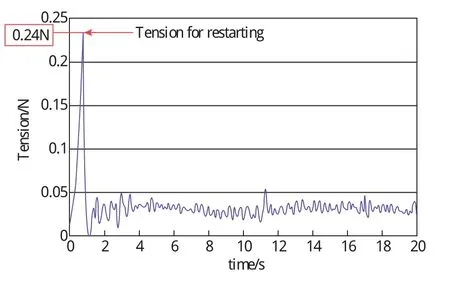
图15 绳系张力监测结果Fig.15 The measured tether tension variations

图16 地面试验配置图Fig.16 The ground test configuration
(2)测量释放摩擦的绳系释放试验。
试验配置如图16(a)和图16(b)所示。缠绕装置用于实现绳系从卷轴的恒速释放。作用于高灵敏度力传感器 (与卷轴装置连接)的外力能够以释放摩擦力的形式被测量到。通过调节缠绕装置的速度可以控制绳系的释放速度。图17给出了仿真结果。
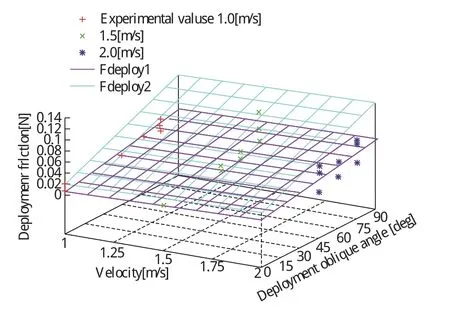
图17 释放摩擦力与释放速度及释放角度的关系图Fig.17 The relationship among the release friction force,the deployment velocity and the deployment angle
4.2.2 绳系制动装置的地面测试
绳系制动装置试验配置图如图18(a)所示。制动装置采用悬挂方式,而且与高灵敏度力传感器连接。当缠绕装置以恒定速度从制动装置牵拉绳系,能够测量到制动装置产生的外力。释放速度考虑设置为0.5m/s、1.0m/s及2.0m/s。图18(b)给出了仿真结果。
5 启示与建议
5.1 启示
(1)电动力绳具有极为广阔的空间应用前景。
以KITE计划为代表的电动力绳系离轨技术及关键技术验证已逐渐受到国内外航天大国的关注,目前主要应用背景就是空间碎片清理。事实上,空间碎片清理已成为世界航天界非常关注的重大课题。有计算结果表明,仅通过碎片轨道的自然衰减使碎片及失效航天器离轨通常耗时极长,因此迫切需要开发低耗高效的碎片离轨、清除技术。目前主要有推力离轨、空间机器人离轨等方法,但这些方法都存在耗能大、成本高的缺点,而基于电动力绳的离轨技术能够弥补这些缺点,能够有效降低推进剂消耗,并实现对太空垃圾执行碎片及失效航天器的清理。
另一方面,根据电动力绳的工作原理,电动力绳不仅可以实现离轨,还可以通过添加额外的电源装置,实现航天器的推进。因此,电动力绳在空间应用领域存在着极为广阔的应用前景。
(2)空间绳系动力学十分复杂,需要通过仿真分析与地面试验开展深入研究。
空间电动力绳的应用是一个探索性极强的研究领域,涉及许多尚待解决的重要科学问题,即使结构形式最为简单的电动力绳系统,其动力学及控制问题也十分复杂。由于系绳具有柔性大、阻尼小等特点,当其被置于空间环境并与航天器耦合时极易产生一系列复杂的天平动及振动,同时,电-力耦合作用也可能使系统姿态运动能量不断增加而导致系统失稳。因此,需要通过理论研究、仿真分析及地面试验等手段对绳系的动力学行为研究透彻。

图18 绳系制动装置的地面测试配置与结果曲线Fig.18 The test results of the tether braking device
(3)降低控制算法的复杂性,提高机构的可靠性。
KITE计划中,其绳系释放及制动过程通过简单的硬件机构设计实现,并不存在控制行为,本质上属于被动释放过程。这种方式能够有效地避免复杂的飞行控制软件带来的系统低可靠性,同时通过硬件机构的可靠性确保绳系的可靠释放。尽管最终在轨试验由于释放装置的故障而终止,但这种 “轻算法,重机构”的设计研制思路值得借鉴。进一步,在机构巧妙设计的基础上,需要大量数值仿真及地面试验确保机构的可靠性。
(4)在轨试验尽可能采用搭载试验,并利用飞行器已有技术及单机。
KITE计划通过搭载HTV-6开展,并大量使用了HTV的装置,如交会雷达、推进装置及电源等装置,避免了飞行器及相关装置的重新研制,大大降低了研制周期及费用,使研究团队聚焦于关键技术攻关,显著提高了研究效率。受启发于此,新技术的验证,应尽可能采取搭载方式,并对成熟飞行器进行适应性改进实现。
5.2 建议
空间电动力绳系统是一个探索性极强的研究领域,由于系统具有电-力耦合、强非线性、大变形等特点,导致当前研究多局限于简化模型、近似方法、数值算例等方面,与真实空间环境存在较大差异。本文通过对KITE计划的研究,对我国开展电动力绳系离轨技术发展思路提出如下建议:
(1)电动力绳系统属于多物理场耦合系统,电-力耦合、时变参数、轨道-姿态、环境摄动等使系统具有高度非线性和复杂性,需要深入揭示电动力绳系统的非线性动力学行为。
(2)亟需加强空间电动力绳系统的完备地面试验研究,尤其加强对 “裸系绳”电子采集技术的试验研究。
