欧洲的空间碎片清除技术发展及其启示
2018-09-18焉宁唐庆博陈蓉李扬
焉宁,唐庆博,陈蓉,李扬
(中国运载火箭技术研究院研究发展中心,北京100076)
1 引言
空间碎片,是指人类在空间进行活动时产生的各种废弃物及其衍生物。特别是执行完发射任务的运载火箭末级/上面级、失效失控航天器等大尺寸目标,或者大量潜在的退役小卫星和卫星星座,将严重威胁着有限的空间轨道资源和在轨运行航天器的安全,因此备受人们关注[1]。有必要对低轨大型失效航天器实施主动离轨、受控再入,降低其再入大气层未能完全烧毁带来的威胁和隐患,从而保障地面生命财产的安全。
自从2012年起,欧洲空间局 (ESA)的 “清洁太空” (Clean Space)倡议主动系统地考虑了全生命周期的空间活动,包括从早期的概念设计到任务寿命结束,甚至考虑如何清除空间碎片。“清洁太空”倡议有三个分支[2],主要包括ecodesign(通过生态设计降低对人类的影响)、cleansat(通过卫星设计减少空间碎片)和e.deorbit(通过主动清除技术实现空间碎片离轨)。
本文重点结合 e.deorbit、RemoveDEBRIS等计划,对欧洲在此方面的技术进展进行梳理和总结,并对我国空间碎片减缓与主动清除技术发展思路提出了建议。
2 欧洲的空间碎片清除技术任务
2.1 e.deorbit任务
e.deorbit的任务目标是移除近地轨道保护区域内欧洲航天局自有的大型空间碎片 (比如废弃卫星ENVISAT),以减少太空垃圾所造成的问题。按照此目标,e.deorbit任务共分解为6个步骤,即发射入轨、进入指定LEO轨道测试、变轨调相至目标轨道、与目标交会、捕获目标、使目标离轨[3]。早期设想的空间碎片捕获及清除手段主要包括:机械臂、夹持机构/触须、飞网、离子束、安装太阳帆、安装推进模块等,如图1所示。
2012-2014年,开展了以空间碎片服务再定向方法的主动清除研究,准备采用欧洲运载火箭 “织女星”的上面级作为e.deorbit捕获系统平台,实施了e.deorbit计划的阶段A研究工作。
2014年12月,欧洲空间局 (ESA)与德国宇航中心 (DLR)就碎片主动清除在轨演示验证(IOD)联合任务签署了谅解备忘录[4]。DLR已经开展了多年的在轨服务任务研究,如DLR的DEOS计划。
2015年,ESA从轨道上移除太空垃圾的e.deorbit任务进入阶段B1,开展任务设计工作。在2016年12月举行的欧洲部长会议上积极推动了e.deorbit任务,列入了下一次部长会议的议程,但最终决定是否能够获得批准是在2019年,预计2024年发射并执行任务[5]。目前制定的具体任务计划为:
(1)2024年1月由欧洲运载火箭 “织女星”改进型VEGA-C发射升空,并在300km的圆轨道试运行,通过轨道转移及调相至目标轨道;
(2)2024年2月,采用先进图像处理技术实施目标监视;

图1 拟采用的空间碎片捕获及清除技术方案示意图Fig.1 Schematic of space debris capture and removal techniques
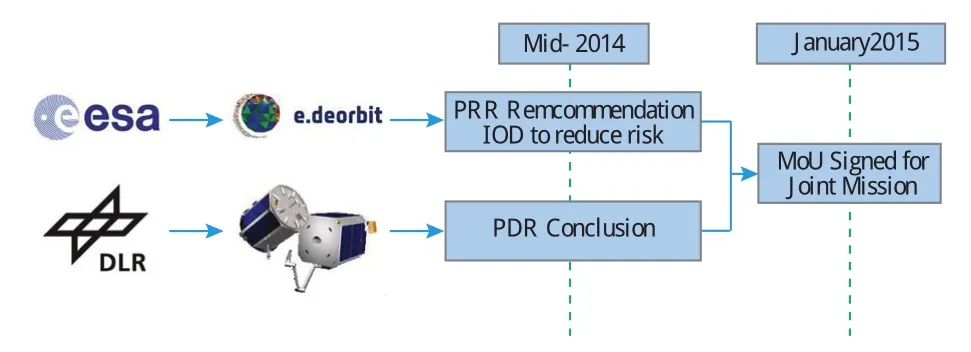
图2 ESA与DLR之间的空间碎片主动清除在轨验证谅解备忘录Fig.2 MoU between ESA and DLR for an ADR in-orbit demonstration
(3)2024年3月,采用复杂GNC技术实施交会和同步运动,并采用创新的机器人技术捕获目标 (如机械臂、飞网、鱼叉等机构),然后实现组合体稳定;
(4)2024年4月,实施离轨处置。
2.2 RemoveDEBRIS任务
碎片清除任务 (RemoveDEBRIS Mission)是欧盟框架7(European Union Framework 7)的研究项目,为耗资1130万欧元的低成本任务。该任务旨在验证碎片主动清除关键技术,包括在真实的太空环境下使用飞网、鱼叉、拖拽帆以及基于视觉的导航技术,原计划在2016年发射。但根据目前的实际情况,拟定于2018年4月通过猎鹰-9运载火箭发射,用于技术验证的卫星将在国际空间站上释放。母星约120kg,拖拽帆展开面积达10m2,模拟的碎片目标为立方星,每颗重约3kg[6]。
RemoveDEBRIS任务的第一项试验是利用飞网捕获太空碎片目标。首先从演示平台上发射第一颗立方体卫星DebrisSat 1,然后卫星可展开装置充气,形成模拟碎片目标,演示平台将发射飞网捕获目标,并切断飞网,如图4(a)所示。随后开展第二项试验,从演示平台上伸展出十字靶标,然后发射自带的鱼叉命中靶标,如图4(b)所示。接着开展第三项试验,释放第二颗立方体卫星DebrisSat 2,使用平台上的视觉导航设备对空间碎片进行观测和成像,如图4(c)所示。最后开展第四项试验,从演示平台上伸展出机构,然后展开制动帆,促使卫星加速脱离轨道,并在大气层中烧毁,如图4(d)所示。
2.3 DEOS任务
空间系统演示验证技术卫星 (TECSAS)任务是由欧洲宇航防务集团空间运输公司联合德国宇航中心 (DLR)提出的,并与俄罗斯联邦航天局、加拿大航天局联合开展的一个研究项目,旨在演示验证空间机器人在轨服务的可行性和技术的成熟性。项目于2006年结束之后,DLR继续开展了名为 “德国在轨服务任务”(DEOS)的计划,重点对LEO轨道非合作目标的交会、捕获和离轨等技术进行了研究。DEOS计划携带七自由度机械臂,臂展4.2m,机械臂设计为能够捕获空间翻滚目标,单轴角速度不超过 5°/s,捕获位置为 ENVISAT的星箭对接环[7]。
2.4 CleanSpace One卫星
2015年7月,瑞士洛桑联邦理工学院研究人员公布了 “太空清洁一号”(CleanSpace One)卫星捕获目标的模拟动画。目前,该卫星已经通过原理样机研制阶段,下一步是开发工程样机,计划最早于2018年发射升空。

图3 e.deorbit任务最新方案设想图Fig.3 Artist’s concept of the e.deorbit mission
“太空清洁一号”卫星第一个清理目标是2009年瑞士发射的一颗卫星,将使用精确制导与控制系统进入近地轨道,利用相机识别太空垃圾,并接近目标,之后将其捕获。 “太空清洁一号”卫星选择了类似 “吃豆子”(Pac-Man)游戏的捕获方案,采用一个网状结构张开,在捕捉目标后闭合。这种方案能够提供比爪子和人造机械手更大的运动包络空间。成功捕捉到太空垃圾后,“太空清洁一号”卫星将携带太空垃圾一起在地球大气层燃烧殆尽[8]。
3 欧洲的空间碎片清除技术路线图

图4 RemoveDEBRIS任务方案示意图Fig.4 RemoveDEBRIS mission demonstration

图5 DEOS计划及地面试验Fig.5 DEOS mission and ground test
欧空局 “清洁太空”团队 (Clean Space Team)于2013年9月份发布了空间碎片减缓的总路线图,表明了e.deorbit、DEOS和CleanSpace One等项目之间的关系[9]。该团队根据大众对环境问题以及对空间开发的可持续关注,希望通过采取行动,将威胁与挑战转化为机遇,并提出了倡议的目标是通过保护环境来保证未来的空间活动。
ESA在其2015年底发布的e.deorbit实施计划中给出了系统研究、刚性捕获机构、柔性捕获机构、GNC及电子设备的详细发展路线图,其中的系统研究路线图如图8所示。
ESA于2012年开展了阶段A(见图7)的协同设计实施工作,提出了相应的研究成果,并给出了夹持机构捕获和飞网捕获的初步方案[10]。
(1)夹持结构方案,如图9(左)所示:
1)夹持机构+推杆
2)需要机械臂
3)VEGA运载火箭发射 (1590kg)
4)化学推进,2个425N喷管,总质量的52%为推进剂
5)激光雷达、远距离和近距离相机、反作用飞轮+推力器
6)受控再入
(2)飞网方案,如图9(右)所示:
1)飞网射向目标

图6 CleanSpace One计划及捕获网兜地面样机Fig.6 CleanSpace One and capture net ground mockup

图7 ESA于2013年发布的空间碎片减缓总路线图Fig.7 ESA’s space debris mitigation roadmap released in 2013
2)一个飞网+一个冗余备份
3)VEGA运载火箭发射 (1560kg)
4)化学推进,2个425N喷管+2个220N喷管,总质量的56%为推进剂
5)激光雷达、远距离相机、推力器
6)受控再入
随后开展的阶段A研究工作中,空客、Kayser-Threde和Thales分别就刚性捕获方案和柔性捕获方案提出各自的捕获技术、附着方式、有效载荷、质量和经费等,如表1和表2所示。

图8 ESA于2015年在e.deorbit实施计划中给出的系统研究路线图Fig.8 ESA’s system research roadmap by e.deorbit implementation plan in 2015

图9 夹持结构方案 (左)和飞网方案 (右)Fig.9 Clamping structure(left)and fly net(right)

表1 刚性捕获方案对比Tab.1 Comparison of robotic capture concept

续表1
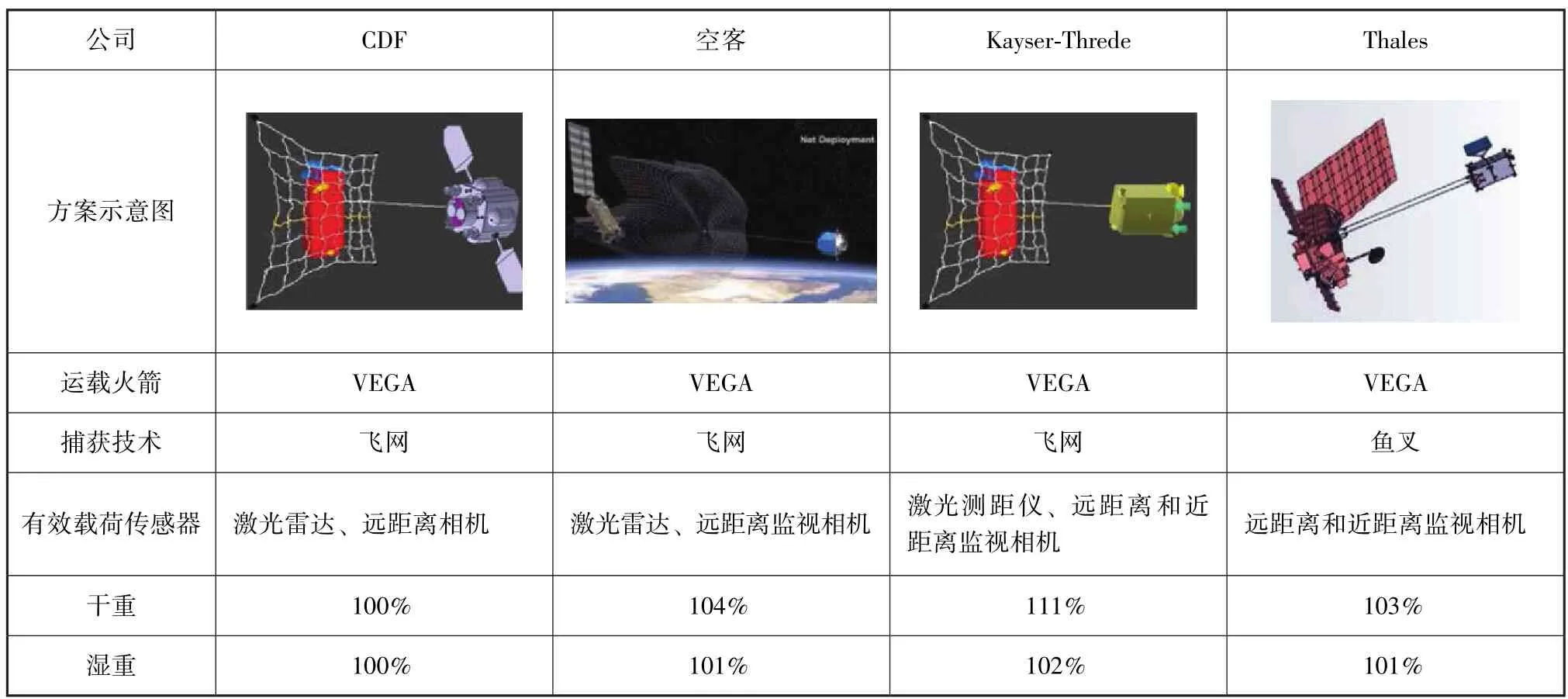
表2 柔性捕获方案对比Tab.2 Comparison of flexible capture concept
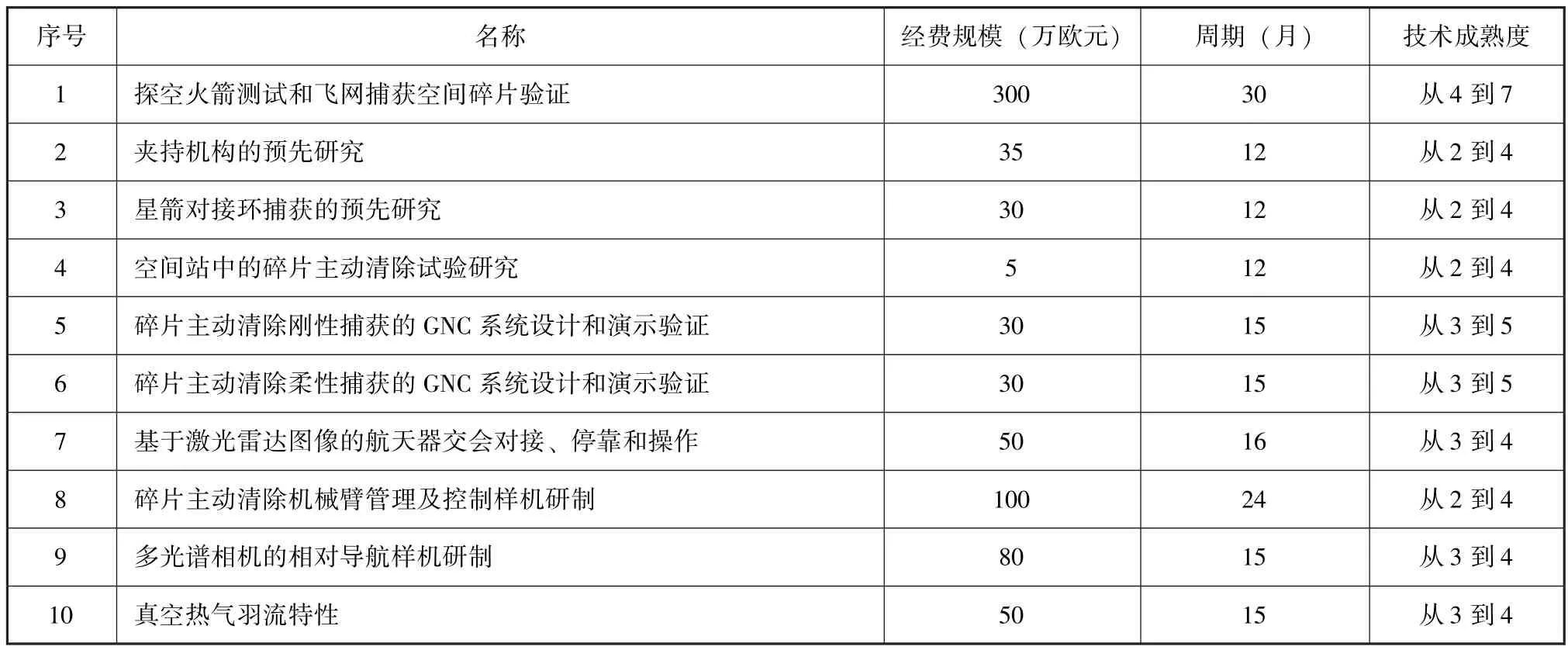
表3 ESA于2015年底提出的后续研究工作Tab.3 Upcoming activity descriptions by ESA at the end of 2015
通过e.deorbit实施阶段A的研究工作,目前共识别出5项主要风险,作为阶段B1的重点[4]:
①产生更多碎片的风险
②未成功捕获的风险
③追捕和目标航天器碰撞的风险
④对地面造成伤亡风险
⑤计划延期的风险
捕获技术与GNC软件的技术成熟度较低意味着需要更多经费支持和研发,但首次任务除了利润和发射费用以外,阶段B2/C/D/E的总经费上限为150万欧元[3]。
4 空间碎片主动清除任务所面临的挑战
按照e.deorbit任务实施空间碎片主动清除的6个步骤,并结合e.deorbit任务识别出的5项主要风险,可见执行空间碎片主动清除任务主要面临着以下三方面的挑战:
(1)相对目标悬停后对翻滚目标的识别、接近及同步运动。
采用高动态高精度探测技术实现对目标位置、姿态的准确测量和估计,为悬停、接近和同步运动提供重要输入。基于自主探测感知实现对待捕获目标特征的识别,为刚性捕获提供捕获点。主动清除飞行器应具备高精度的位置和姿态控制能力,实现对目标的接近及同步运动。
(2)无论是采用机械臂等刚性捕获方式还是飞网等柔性捕获方式,均应安全可靠,不产生新的空间碎片。
对于刚性捕获翻滚目标,应在操作环节设置相应的柔顺控制,防止捕获过程中的冲击对目标或自身造成损坏,避免产生新的碎片。而以飞网为代表的柔性捕获方式,应注重网口收拢的研究,提升捕获可靠性。

图10 在距离目标50m附近的位置悬停,识别翻滚目标,并接近、同步运动Fig.10 Hovering and identifying the tumbling target at a distance of 50m,with approaching and synchronizing

图11 无论是采用机械臂还是飞网,安全的捕获方式,实现停靠Fig.11 Either with a robotic arm or a net, capture it in a secure way
(3)在捕获后,应采取安全可控的方式实现变轨、离轨,实现空间碎片主动清除。
对于刚性捕获方式应对目标实现接管控制,对组合体的质量特性进行在轨辨识,利于姿态稳定,为组合体离轨提供必要条件。而对于柔性捕获方式,则应通过机构锁紧相应的柔性绳网,提升变轨、离轨的安全性。
5 启示与建议
参照欧洲在空间碎片清除方面的研究工作、技术发展路线图、工程任务实施计划,结合我国开展空间碎片减缓技术的研究现状,提出后续的发展建议:
(1)开展多种途径的关键技术攻关与验证。
RemoveDEBRIS演示验证集成飞网、鱼叉、视觉导航、制动帆等多种技术开展在轨演示验证,CleanSpace One计划以2009年发射的在轨目标开展捕获及离轨技术验证,具备一定的工程应用能力。建议我国应持续跟踪国外空间碎片主动清除技术,开展深入研究,不断提升技术成熟度。
(2)加快推进空间碎片清除工程化实施。
e.deorbit项目明确以清除ENVISAT为目标开展多种途径的技术方案论证,为后续2024年计划实施的主动清除任务实施提供重要依据。建议我国也应结合多种途径的关键技术攻关,加快推进空间碎片清除工程化实施。
(3)瞄准商业市场开展空间碎片清除服务。
具备空间碎片清除工程化应用能力后,应充分借助运载火箭及上面级发射后的剩余能力,提供空间碎片清除商业服务,实现高效率低成本运营,为商业航天的多元化发展提供有效支撑。
