基于行驶场景模型的线控辅助转向系统仿真∗
2018-09-14高振海孙天骏
高振海,孙天骏,何 磊
(吉林大学,汽车仿真与控制国家重点实验室,长春 130022)
前言
基于行驶场景模型的驾驶员线控辅助转向系统在传统的线控转向系统基础上,根据驾驶员当前转向操控的缺陷,主动对转向系统施加补偿或修正,辅助驾驶员实现理想行驶轨迹。目前,依靠雷达、视觉和传感器的自主控制型无人驾驶汽车发展较快,在实现“人-车-环境”综合交互的过程中,行驶场景模型的搭建已成为该领域研究的焦点[1]。
早期的线控转向(steering-by-wire,SBW)系统利用传感器获得转向盘角度,由控制算法折算转向电机驱动转矩,并通过电控实现传动比的变化[2]。随着研究的深入,研究人员尝试通过对优秀驾驶员转向轨迹的分析建立实际转向过程的行驶场景,并利用线控技术解决角传动比实时动态调控问题。
近年来,SBW作为更新一代的汽车转向系统,研发趋势和技术前沿是兼顾转向过程的操控性、精确性与适应性,尝试在结构和控制算法上实现改变[3]。例如,德国BMW汽车公司的概念车BMW Z22应用了线控转向技术,减小转向幅度,拓宽极限行驶区域,使紧急转向时驾驶员的紧张感得到了很大程度的降低[4];日本丰田公司在2003年纽约国际车展上推出的Lexus HPX概念车也采用了SBW系统,通过在仪表盘上集成控制功能模块实现车辆的自动控制[5]。但SBW系统由于取消了机械连接,驾驶员感受不到路面传来的阻力,因此需要模拟一个转向盘的力反馈来增加驾驶员的“路感”。如Odenthal D和Amberkar通过在SBW系统中加装力矩传感器,可将测量的结果经处理后传递到转向盘控制系统中,以增强驾驶员的路感[6];武汉理工大学的杨胜兵采用变结构和模糊控制相结合的方法来研究经验公式中的各参数与路感的关系[7];南京航空航天大学的谷霄月基于动力学模型与汽车状态参数补偿的混合路感规划方法和H∞控制方法设计了线控转向车辆路感控制策略,为驾驶员提供良好的路感[8]。
基于驾驶员模拟的方法和基于汽车横向运动学模型的方法都属于横向控制技术。其中,前者可通过简单的运动学模型和驾驶员实际操纵特性建立控制算法实现对转向过程的动态调控[9-10]。因此,本文中研究的出发点是在SBW系统决策出来的角传动比基础上,结合行驶场景模型实现对转向过程的修正或补偿。
本文中在前期开展的驾驶员线控转向技术研究基础上,依靠车辆的环境感知系统获取运动状态信息,并在动态输出反馈控制框架下,根据车辆运动学和动力学理论结合车辆2自由度模型提出了基于行驶场景模型的角传动比动态协调控制机制,建立了线控辅助转向系统的转角控制算法。最终通过转向过程的速度、加速度、横摆角速度和轨迹仿真,并与其它转向控制算法和机械转向进行对比,验证了系统对转向过程主动调控和施加补偿或修正控制的有效性与实时性。
1 问题描述
考虑在城市行驶工况中,驾驶员在转向过程中需要输入精确的转向盘转角与稳定的转弯车速,因此使车辆的横向控制技术对驾驶员提出了更高的要求,导致经验欠佳的一般驾驶员在转向过程中更容易发生转向不足或转向过度的情况,但无论哪种情况,都会使车辆面临失稳的危险,且会引发交通事故[11]。研究发现,人、车、环境是交通事故成因的核心要素,其中55%~90%的交通事故源于人的驾驶技能不足[12]。因此,本文中定位于解决驾驶员转向过程中的转向不足或转向过度等问题。
如上所述,综合考虑实际转向过程中不同驾驶员的操控特性、车辆运动学和动力学特性等多个相互关联的性能指标,实现行驶场景建模和角传动比的动态控制是当前驾驶员线控辅助转向系统研究的核心问题。
针对这一多性能指标的转向过程动态调控问题,采用基于行驶场景建模的理想轨迹规划方法,并与车辆2自由度模型相结合,通过分析实际转向过程中当前转向路径与理想行驶轨迹之间的偏差,计算当前转向盘转角与目标转角的差值,将多性能指标的动态协调控制转化为轨迹预测和角传动比的控制问题。
传统的SBW系统如图1所示,主要由转向盘模块、转向执行模块和控制器3部分以及故障容错系统、车载通信网络和电源等辅助系统组成,取消了转向盘和转向前轮之间的机械连接,使它们之间既可独立运作,互不影响,又可实现传感器与控制器之间的相互关联[13]。

图1 线控转向系统结构示意图
当一般驾驶员在转向过程中出现转向不足、转向过度或无意识偏离转向路径时,需要优化主控制器的控制算法,如图2所示。以优秀驾驶员理想行驶轨迹中的目标转角与车辆2自由度模型中的实际转角为输入量计算其偏差,实现对转向过程中角传动比的主动补偿或修正。
与传统的SBW系统相比,基于行驶场景模型的线控辅助转向系统有如下特点。
(1)该系统的实时性更好。传统控制方法如PID或模糊控制,适用于基本为线性且动态特性不随时间变化的系统,缺乏与实际转向环境的交互性。而行驶场景模型的搭建包含了优秀驾驶员转向操控过程的理想行驶轨迹,通过实际转角与目标转角偏差的计算,主动调控转向过程,有效降低了人为操控强度,提高了动态实时性。
(2)该系统的操控性更好。在SBW系统行驶场景设计过程中,通过采集车辆行驶状态信息,将行驶场景设计为与其相关的非线性函数,虽然满足了驾驶员对所处交通环境模拟的需求,但该种方式得到的路感与传统车辆路感存在一定的差异,驾驶员不能准确感知到当前转向的操控感觉。而基于驾驶员的辅助线控系统,并考虑驾驶员的真实转向操控,当出现转向缺陷时,基于控制算法的设计,利用线控转向技术加以辅助,起到补偿或修正的作用,改善其操控性。
(3)该系统的鲁棒性更好。在SBW系统的执行过程中,没有过多考虑汽车横向运动学、动力学特性,因而忽略驾乘人员的体验感与舒适性。而在线控辅助转向系统设计过程中,基于车辆侧向动力学的2自由度模型,通过对侧向加速度与横摆角速度的阈值加以限制,实现兼顾转向过程安全性和驾乘人员舒适性的理想转向行驶轨迹,进而使该系统的鲁棒性得以提升。

图2 线控辅助转向系统控制流程
2 驾驶员主动转向过程分析
驾驶员辅助转向系统根据搭建的行驶场景中车辆2自由度模型对未来行走轨迹进行预测,且不断修正当前行驶轨迹与理想行驶轨迹之间的偏差,实现对驾驶员主动转向意图的动态调控,使其更加合理、规范和安全。
在不同的场景和任务下,驾驶车辆的理想轨迹有所不同。对于简单的直道保持和弯道保持可以将车道的中心线作为车辆的理想轨迹;对于复杂的场景和任务,例如避让静态障碍物、换道、超车等理想轨迹的确定就很困难。因此,在转向过程中,考虑驾驶员是否存在大角度偏离:当在弯道保持状态下,其理想行驶轨迹为车道线的中心线;当在弯道偏离状态下,其理想行驶轨迹的建立需要行驶场景模型。
2.1 弯道保持状态
当驾驶员在转向过程中并未出现大角度偏离时,可根据前方轨迹点的信息和当前车辆运动状态,算出一个理想的圆弧轨迹,并由轨迹曲率与转向盘转角的对应关系来确定转向盘转角输入。
研究发现,随着车速的增加,车辆稳定圆周运动的半径逐渐增大,而根据几何模型计算出的理论半径却没有改变。因此,利用阿克曼转向几何模型对车辆行驶过程的动态评估精度要高于车辆2自由度模型,其中,通过转向敏捷度来描述驾驶员的转向过程,如图3所示。
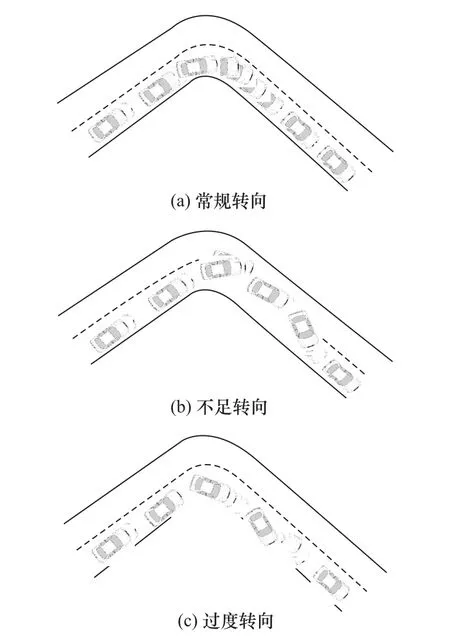
图3 驾驶员弯道保持状态示意图
定义驾驶员在转向过程中的转向敏捷度为横摆角速度与航偏角的比值:

式中:ωr为横摆角速度;φ为航偏角;u为纵向速度;Ld为轴距;k为稳定性因数。k的计算公式为

式中:m为汽车质量;a,b分别为前后轴到质心的距离;k1,k2分别为前后轮等效侧偏刚度。
理想转弯半径R0为

因此,通过转向敏捷度判断实际转弯半径R与理想转弯半径R0的关系如下:
2.2 弯道偏离状态
当驾驶员在转向过程中存在大角度偏离车道时,道路的中心线不再是理想的行驶轨迹,因而不能用它来指导转向路径的规划,如图4所示。

图4 驾驶员弯道偏离状态示意图
取而代之的是通过采集不同驾驶员转向路径的GPS信息,结合双曲线切线公式并移植入1阶传递补偿函数,即


式中:Δδ为前轮转角补偿函数;Gs为转向比例增益;Th为滞后时间常数;ΔL为理想路径标记点与当前路径标记点的纵向位置偏差。
在此,设L为当前航偏角下的预测路径,其计算公式为

式中Tp为预期时间。
由于预测路径的规划是基于当前的航偏角计算得到,故为使模型能具备实时预测和路径规划能力,须添加一个对前轮转角的前馈性制:


理想行驶轨迹针对不同的路况和不同的驾驶习惯有不同的解释,其生成过程是根据优秀驾驶员操控特性绘制出来的,因此在转弯偏离期间,一方面需要理想路径规划模型,另一方面需要适当的驾驶员模型[14],如图5所示。

图5 驾驶员弯道偏离状态轨迹规划
3 行驶场景建模
在进行转向路径控制过程中,实际上是通过控制转向盘实现对车辆的行驶轨迹(X,Y)的控制,而只考虑车辆侧向和横摆运动两个自由度的车辆2自由度模型就很好地满足了这种控制要求。因此,将多自由度模型简化为2自由度模型,直接以前轮转角作为输入,且不考虑转向系统的影响、地面切向力对轮胎侧偏特性的影响、悬架的作用、空气阻力和轮胎由于载荷变化而引起轮胎特性的变化等,只考虑轮胎侧偏特性的线性范围,车辆2自由度模型如图6所示。
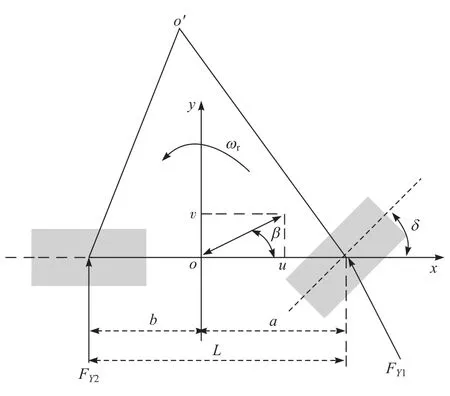
图6 车辆2自由度模型
图中,x为车辆坐标系的纵轴,y为车辆坐标系的横轴:在某一时刻t,质心速度在y轴上的分量为v,表示侧向速度;在x轴上的分量为u,表示纵向速度。
时间经过Δt后,质心速度的大小和方向均发生变化:其变化量在y轴上的分量为Δu+vΔθ;在x轴上的分量为Δu-vΔθ。
速度分量除以Δt并取极限,可得车辆的绝对加速度:在x轴上的分量为ax=-vωr,在y轴上的分量为ay=+vωr。
由此,在车辆2自由度模型中可得出车辆沿y轴方向所受合力和绕质心的力矩,即

式中:δ为前轮转角;FY1为地面对前轮的侧偏力;FY2为地面对后轮的侧偏力;a和b分别为前后轴到质心的距离,为固定值。
由于δ较小,故可将上述计算方程简化为车辆2自由度的运动微分方程:
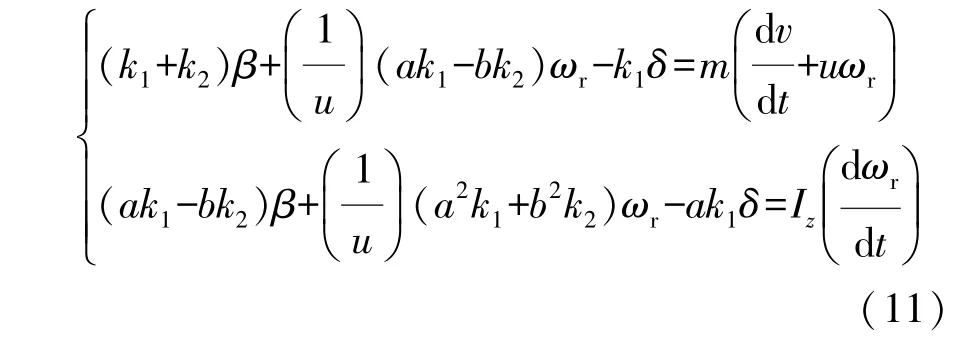
式中:k1和k2分别为前后车轮的侧偏刚度,是固定值;β为质心侧偏角。
基于该行驶场景模型,结合车辆几何模型位置估计原理,在车速小于30km/h的一般转弯条件下,通过传感器获取当前车速u、转向盘转角δk、坐标和航偏角(xk,yk,φk)可估算出经历ΔT后下一时刻的车辆位置信息(xk+1,yk+1,φk+1),即

如图7所示,在车辆的转弯路径规划过程中,A0为当前轨迹水平位置标定点,D为期望路径上的预瞄点,ρ为道路曲率。
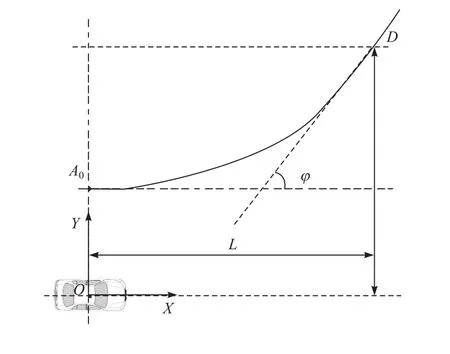
图7 车辆转弯与道路几何关系示意图
假设以下两个条件成立:一是车辆横向速度与纵向速度的比值很小,即纵向速度远远大于横向速度;二是航偏角φ很小,则航向变化率为

可以设置道路曲率ρ为0,即不计实际路径的影响,可得出

可以看出,当不计路径影响时,车辆的航向变化率即为横摆角速度。
4 仿真
如前所述,首先将目标转角作为输入,测试线控输出量为横向速度、横向加速度和横摆角速度,以验证模型的可行性,结果如图8所示。
在该模型的基础上,进行机械转向与线控转向的稳定性对比。其中,先由优秀驾驶员通过机械转向生成理想行驶轨迹,再由仿真测试15,20和25km/h的车速下车辆的转弯轨迹和航偏角,结果如图9所示。
最终,利用Matlab模拟基于行驶场景模型的实际转向过程,通过主动动态调控前轮转角,施加补偿或修正控制使实际行驶轨迹趋于机械转向操控下的理想轨迹,以验证模型的鲁棒性,结果如图10所示。
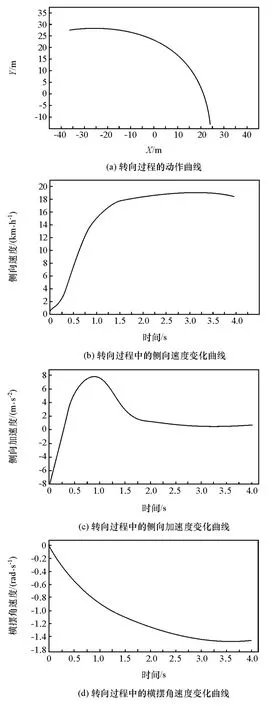
图8 转向模型测试仿真
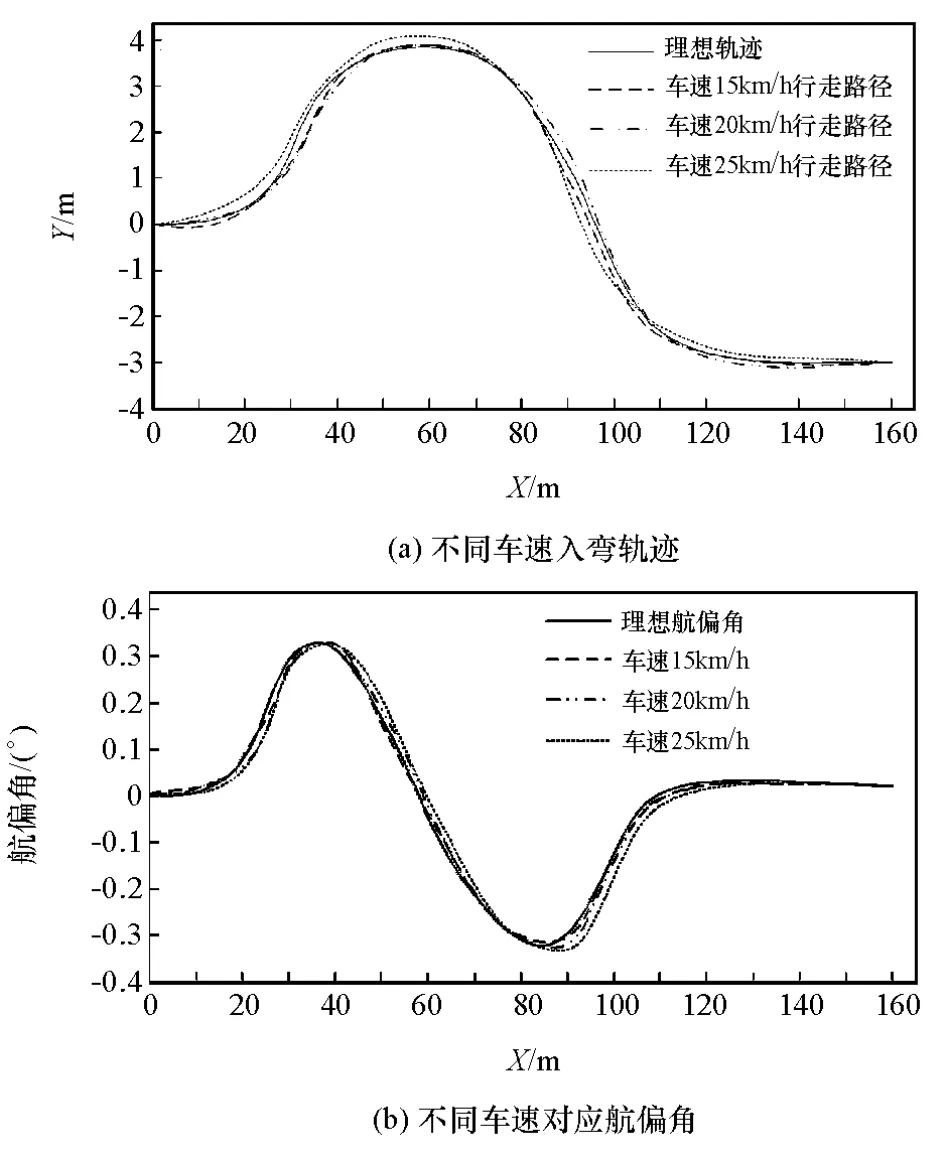
图9 机械转向与线控转向在不同车速转向过程中的仿真
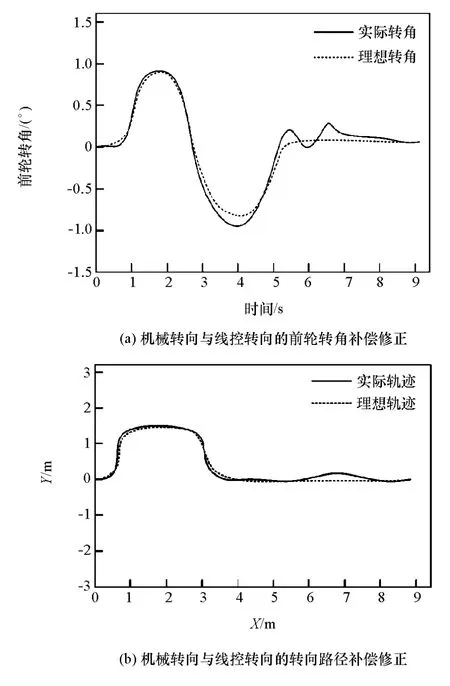
图10 转向过程的修正和补偿仿真
仿真结果:(1)由图9可见,不同车速下,该系统控制下的行驶轨迹与机械转向控制下的理想行驶轨迹和航偏角都很接近,验证了该系统的可行性和稳定性;(2)由图10可见,该系统对前轮转角偏差具有修正和补偿的功能,说明该系统具有较好的鲁棒性。
5 结论
基于车辆2自由度模型建立了驾驶员行驶场景。在该场景中,通过对比驾驶员当前操控下的未来行走路径与优秀驾驶员的理想行驶轨迹,利用线控转向系统,实现对驾驶员转向过程的补偿或修正,提高转向精度,避免转向不足或转向过度等常规问题,在辅助驾驶员实现良好转向操控意图的同时,使行走路径更为合理,从而保障车辆行驶过程的安全性。得出的主要结论如下。
(1)传统的SBW系统在工作时可能会使驾驶员失去“路感”,因此本文中基于对驾驶员主动转向过程的分析,在SBW系统核心技术研究的基础上结合汽车运动学、动力学理论建立了行驶场景模型。
(2)将所建立的行驶场景模型进一步与车辆2自由度模型相结合,兼顾考虑转弯过程的操控性、稳定性与鲁棒性,参照优秀驾驶员利用机械转向操控下的行驶轨迹,设计了基于行驶场景模型的转向主动调控算法计算角传动比,利用线控转向技术实现动态调控。
(3)由Matlab/Simulink搭建平台,分别对模型的操控性、稳定性和鲁棒性进行测试仿真,验证了所设计算法控制下车辆转向过程的操纵稳定性。进而,在该场景的算法设计中,实现了当前操控下车辆未来行走路径与理想行驶轨迹的误差计算,当驾驶员在转弯操控过程中出现转向不足或转向过度时,对涉及的误差信号进行动态调节,主动提供补偿或修正操作,使驾驶员实现良好的转向意图操控,并使转向路径更为合理、安全。