智能汽车电磁自动防撞控制系统研究
2018-09-10邢鑫梅
邢鑫梅
摘要:由近年来汽车业的动向不难看出,智能汽车已然成为当今社会汽车发展的潮流趋势。随着智能汽车的迅猛发展,其行车安全性能保障的问题也越发地受到人们的重视。目前市场上的智能防碰撞系统大多都是预警系统,即依靠传感器检测到危险而后通知驾驶员,最终由驾驶员采取措施防止交通意外的发生。而本文所做出的研究就是在原先预警的基础上,利用电磁原理,使汽车在小于安全距离的情况下,产生很强的磁场斤力,从而真正智能化地实现“自动防撞”。
关键词:电磁力;排斤;碰撞;防撞
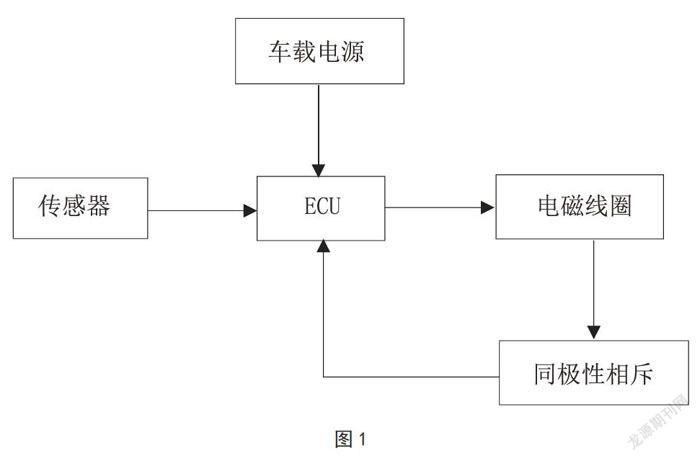
一、设计部分(如图1)
智能汽车自动防撞控制系统设计包括传感器、ECU电子控制单元、车载电源、电磁线圈等,利用电流流过电磁线圈产生电磁力,同极性电磁力相互排斥的原理,达到获得极大减速度,降低伤害的目的。
本设计处理器采用ECU电子控制单元,距离传感器采用超声波测距离传感器,车载电源采用汽车蓄电池,电磁线圈采用安全超导线圈。
处理器采用ECU电子控制单元。ECU由微处理器(CPU)、存储器、输入/输出接口、模数转换器以及整形、驱动等大规模集成电路组成。发动机在运行时,处理器采集传感器传过来的信息进行分析、计算、处理,然后进行输出,控制外面的执行机构。
超声波距离传感器采用超声波回波测距原理,运用精确的时差测量技术,检测传感器与目标物之间的距离,采用小角度,小盲区超声波传感器,具有测量准确,无接触,防水,防腐蚀,低成本等优点。
车载电源的输出端连接着ECU处理器的输入端,车载电源通过车载蓄电池为处理器进行供电,车载电源通过VCC进行供电。
二、工作原理
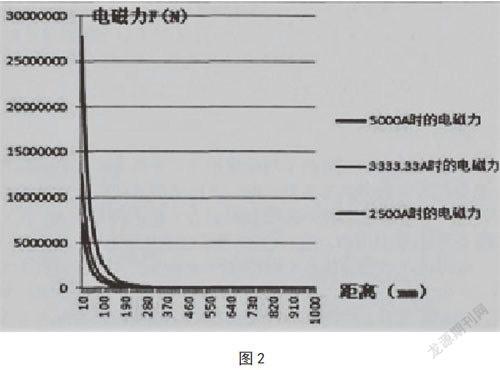
电磁力是一种非接触力,其大小主要与电流、距离等因素有关,电磁力变化是非线性变化,由电磁力一距离图可见距离越小,电磁力越大(如图2)。
智能汽车电磁防撞控制系统是利用电流流过电磁线圈产生电磁力,而两辆车的距离小于安全距离时,将会同时产生同名磁极,根据同极性电磁力相斥的原理,达到缓冲减弱车辆相撞的程度,乃至使车辆停驶。
在汽車周身放置电磁线圈以及距离传感器,传感器感应到两辆车的距离小于安全距离时,将信息传递给ECU处理单元,ECU将距离信号转化为电信号,操纵车载电源与电磁线圈之间的开关闭合。电磁线圈通电,两辆相近的车的车身产生同极性磁场,互相排斥,使两辆车同时拥有极大的减速度,从而达到减速乃至停车的目的。
此套控制系统除了具备自动防撞控制以及普通汽车防撞预警系统的优点外,更利用瞬间产生的强大的电磁相斥力使人体前倾得到缓冲,致使人不会撞到转向盘,使驾驶员避免二次伤害,保护其人身安全。
电磁力具有极高的灵敏度,比起之前控制制动器在灵敏性程度上更甚一筹,能够在较短的时间内利用电磁斥力实现减速以及停车。
三、结束语
通过以上对系统的介绍,该系统是借助一种非接触式的力来进行缓冲,拥有一个极大的减速度,使即将相撞的两辆车迅速减速停车,避免两车相撞,提高车辆的安全性能。在如今电子技术的飞速发展的年代,该系统应用在汽车上能够使车辆的安全系数大大增加,值得更进一步的研究及广泛运用。
参考文献:
[1]胡瑞民.汽车驾驶员电磁缓冲防撞装置设计[J].汽车电器,2018(2).
[2]吉超.智能汽车防撞控制系统的研究[D].重庆交通大学,2017.6.
