无人机低空摄影测量内外业技术流程
2018-09-10雷闪
雷闪
摘 要:无人机低空摄影测量由于其诸多优点,日益成为空间数据获取的一项重要手段。本文在总结实际生产经验的基础上,阐述无人机低空摄影测量的内外作业技术流程。
关键词:无人机;低空摄影测量;内外业技术
中图分类号:P231 文献标识码:A 文章编号:1003-5168(2018)14-0043-02
Indoor and Field Technique Flow of Low Altitude
Photogrammetry by Unmanned Aerial Vehicle
LEI Shan
(Henan College of Surveying and Mapping,Zhengzhou Henan 451464)
Abstract: Because of its many advantages, the Low altitude Photogrammetry by unmanned aerial vehicles is increasingly becoming an important means of spatial data acquisition. This paper was based on the summary of actual production experience,then expounded the internal and external technical process of low altitude photogrammetry by unmanned aerial vehicle, and the acquisition of digital products.
Keywords: unmanned aerial vehicle;low altitude photogrammetry;internal and external work
無人机低空摄影测量是指利用轻小型无人机搭载数码航摄相机,并安装POS系统,获取测区影像及飞控数据,并结合像片控制测量,在数字摄影测量工作站进行作业,获取各种数字产品。在测绘工作中,无人机具有机动灵活、成本低等诸多优点,是目前测绘类数据获取的一项常用手段,不仅可以弥补大多数卫星影像的空间分辨率达不到要求、现势性不足、价格昂贵等缺点,还可以代替传统测绘作业方式。本文详细阐述了无人机内外业工作各项工作技术流程,包括外业航飞、像片控制测量、空中三角测量以及数字线画图的生产。
1 外业航飞系统
1.1 飞行平台
飞行平台采用ZC-7型无人机,其具有性能稳定、灵活性高、应用简便等优点,可开展低空数字航空摄影,获取高分辨率航空影像,用于生产数字地形产品。
1.2 控制平台
控制平台采用YS09无人机飞控系统,YS09无人机飞控系统是一个高性能、微型化的飞行控制系统,精准控制无人机飞行姿态,实时显示无人机的位置、姿态、高度、速度和摄影设备的工作状态数据。
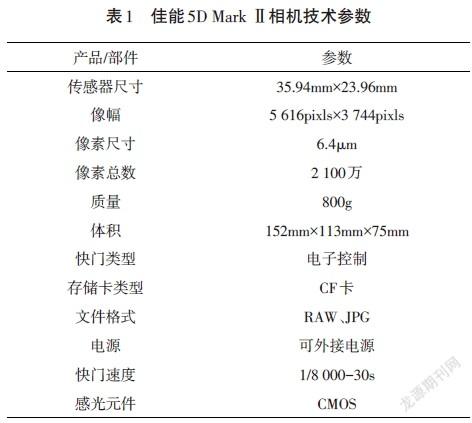
1.3 摄影平台
摄影采用佳能EOS 5D Mark Ⅱ数码相机,此相机具有2 100万有效像素、全画面COMS图像传感器以及35mm焦距镜头,其参数如表1所示。
2 飞行实施
2.1 航线规划
绘制1∶1 000地形图,采用TOPUAVPlan航线设计系统设计地面分辨率GSD为0.1m,航高为547m,航向重叠度设计为80%,旁向重叠度设计为50%并完成航摄区域的划分、航线的自动敷设以及航线敷设结果导出,导入无人机飞控系统后进行航空摄影。
2.2 航摄飞行
2.2.1 工作准备。机组人员在选好的起降场等待合适的航摄天气,同时对航摄硬件进行检查维护,确保设备处于最佳状态,保证在最佳的天气安全飞行[1]。
2.2.2 质量检查。质量检查包括飞行质量和摄影质量。①飞行质量控制:高性能软硬件系统为其提供保障,经过反复调试,使飞机飞行达到最佳状态。②摄影质量控制:地空摄影必须选择能见度大于2km的晴朗天气,3级风以下,尽量保持各飞行架次气象条件基本一致。飞行时间必须在10:00—16:00,以避免太阳高度角太小导致地面物体阴影过长。
2.3 地面控制
将规划设计好的航线导入地面站控制系统YS09中,加载规划好的曝光点位坐标,起飞后无人机自动进入自动驾驶模式,按照规划航线飞行拍照,地面站实时监控无人机飞行状态,进行数据质量监视,并保证无人机工作安全。
2.4 提交资料
航摄完成后,对所有资料进行整理,及时交给内业部门,包括影像对应的POS数据、航飞数字影像、成果资料登记表和数码相机检校参数。
3 像片控制测量
像控点的布设采用区域网布设,执行《1∶500 1∶1 000 1∶2 000 地形图航空摄影测量外业规范》(GB/T 7931—2008)《低空数字航空摄影测量外业规范》(CH/Z 3004—2010),像控点的测量执行《全球定位系统实时动态测量(RTK)技术规范》(CH/T2009—2010)《全球定位系统(GPS)测量规范》(GB/T 18314—2009)。
3.1 像控点布设
第一,像控点布设。航向方向按照10~15条基线,旁向方向按照2~4条基线进行布设。布点时应注意,所布点应能有效控制住成图范围,测段接头处不得有漏洞,点位选在像片航向和旁向重叠六片范围内,并确保在每张像片上都清晰。
第二,检查点布设。一个区域网内的检查点的个数不少于2个。在像控点单人刺点和测量作业的情况下,网角点上应当布设双点,以避免点位刺错。
第三,点号编排原则。像控点编号原则为P+航线+像片号,如PN1534,其中P为像控点类型(平高点),N1表示为航线编号,后三位编号534为534片号。
3.2 像控點的刺点及整饰要求
本次像控刺点及整饰参照《低空数字航空摄影测量外业规范》(CH/Z 3004—2010)的要求,采用电子版,外业人员直接在平板电脑上打开像片刺点,清晰度高,方便快捷。
①在像片上找到相应位置用图块“”标记。
②点位说明要画出周围地物相对关系。略图方位与实地相对应,文字描述应确切说明点的位置,点位附近有高程变化的,应注明比高,注至厘米。
3.3 像控资料的提交
外业像控测量完成后,对所有像控点资料进行整理,及时交给内业部门,像控成果资料包括像控点位测量坐标文件、所选像控点刺点电子照片。
4 低空航测内业处理系统
低空成像系统采用Cannon 5D MASK-II航空数码相机以及Cannon EF 35mm焦距镜头,采用室外检校场法,对相机进行高精度检校,消除其光学畸变及物理畸变,使相机的像素中误差达到0.25个像素。
空中三角测量采用INPHO全数字摄影测量系统,采用POS+控制点的平差方法,首先自动建立航带模型之间的拓扑关系网,用于全自动定向处理,快速、高精度的影像匹配算法大大降低了作业人员的劳动强度。航测内业技术要求执行《1∶500 1∶1 000 1∶2 000地形图航空摄影测量内业规范》(GB/T 7930—2008)。
5 结语
低空无人机航空摄影测量因其轻巧灵活、成图周期短、成本低、影像分辨率高以及现实性强等优点,在某种程度上可以替代大部分传统测绘工作,因而在众多领域得到了广泛应用。其系统化的内外业工作流程对实际项目生产至关重要,从航线规划、外业航飞到像片控制点量测,以及内业空三处理、数字产品的生产和制作,每个步骤都互相关联,并影响最终精度,因此需要严格把控,可谓步步“精”心。而随着计算机技术以及无人机技术的不断发展和进步,低空无人机航空摄影测量将会进一步降低外业工作成本,发挥优势,在更多领域施展拳脚。
参考文献:
[1]张海波.DGPS/IMU辅助航空摄影航片处理方法[D].阜新:辽宁工程技术大学,2013.
