基于电磁直线作动器的主动悬架控制方法研究
2018-09-10张肖肖时岩
张肖肖 时岩

摘要:为了实现电磁直线作动器主动悬架中电磁阻力的有效跟踪输出,进一步提高悬架的性能,利用1/4主动悬架系统的动力学模型和作动器驱动电路模型,设计了LQG控制器和Fuzzy-PID控制器相结合的主动悬架分层控制系统。给出了电磁直线作动器主动悬架控制系统的设计方案,利用MATLAB/Simulink搭建模型进行仿真,并通过具体的台架试验验证。结果表明,主动悬架的减振性能得到了明显改善,其车身加速度和悬架动行程得到了大幅降低。研究结果对电磁悬架的主动控制方法研究具有一定的参考价值。
关键词:自动控制理论;电磁直线作动器;主动悬架;控制方法;减振特性
中图分类号:U463.1 文献标志码:A doi: 10.7535/hbgykj.2018yx02006
with an electromagnetic linear actuator
ZHANG Xiaoxiao, SHI Yan
(School of Mechanical Engineering, Nanjing University of Science and Technology, Nanjing, Jiangsu 210094, China)
Abstract:In order to achieve the tracking output of electromagnetic resistance in the active suspension with an electromagnetic linear actuator(EMLA), and improve the performance of suspension, the hierarchical control system is proposed. Based on a quarter active suspension dynamic model and the EMLA drive circuit model, the hierarchical control system is designed by combining LQG controller and Fuzzy-PID controller to track optimal active force automatically. The design of active suspension control system of the EMLA is presented, the model is constructed by using MATLAB/Simulink, then it is simulated and tested through specific platform. The results show that the vibration reduction characteristic of suspension is improved obviously by using the mehtod, and the acceleration of car body and the suspension working space are reduced drastically compared with passive suspension. The research result has certain reference for the study of the active control of the electromagnetic suspension.
Keywords:automatic control theory; electromagnetic linear actuator; active suspension; control method; vibration reduction characteristic
电磁直线作动器可以实现悬架直线运动形式的动能与电能的直接转换,无须中间的转化环节,效率高[1-3]。因此,将电磁直线作动器应用于主动悬架系统得到了广泛的研究和应用。
目前,针对电磁直线作动器的主动悬架系统控制方法的研究主要集中在电磁力的输出控制方面,这也是实现电磁悬架主动控制的关键[4]。罗虹等[5]将直线电机的直接推力控制方法应用于主动悬架控制系统,设计了最优控制器和推力控制器综合控制系统,经过仿真分析验证了其可行性。汪若尘等[6-7]采用电流滞环控制和最优控制相结合的方法对电磁推力进行控制,有效改善了车辆舒适性和行驶安全性。来飞等[8-9]设计了一种响应快、电磁推力大的电磁直线作动器,结合最优控制理论和矢量控制方法,对包含作动器动力学模型的车辆主动悬架系统进行了正弦路面激励下的仿真分析,结果显示,车辆的平顺性得到明显提高。GYSEN等[10-11]设计了一种线性二次调节控制器,控制悬架系统输出的电磁力,提高了车辆的舒适性和操作性。
虽然针对电磁悬架主动控制的研究都使车身的减振特性在一定程度上得到了改善,但是仍然存在电磁直线作动器无法实时跟踪输出最佳电磁力的问题,致使车身的减振效果不是太理想。
本文针对这一问题提出了电磁主动悬架分层控制方法,即上层采用LQG最优控制方法实时计算出最优控制力,下层采用Fuzzy-PID的控制方法对电磁直线作动器的输入电压进行适时追踪控制,实现对输出电磁力的跟踪调节。为了验证该主动控制方法的正确有效性,利用MATLAB/Simulink对1/4悬架及其控制系统建模仿真,并进行了具体的原理性试验验证。结果表明,本文所设计的电磁主动悬架及其控制方法能有效改善车身振动,提高悬架的减振效果。
1电磁直线作动器
针对某一目标车辆悬架的性能要求,设计与之相適应的单向动磁式直线作动器[12],相关参数见表1,结构图见图1。
单相动磁式直线作动器主要由内磁轭、外磁轭、永磁体和线圈组成。其中内磁轭和外磁轭的材料为DT4C,而DT4C具有很高的磁导率和很小的阻抗,永磁体的材料为NdFe45SH。基于Halbach阵列的2极式动子由2个径向充磁与一个轴向充磁的永磁体组成,其中轴向充磁的永磁体为径向磁通提供回路,使得永磁体内孔磁通密度很小,因此永磁体可以安装在厚度较薄的内磁轭上,以减少动子质量。
该电磁直线作动器应用于电磁主动悬架有2种工作模式,分别为电动模式和发电模式。在发电模式下,电磁直线作动器的动子随车轮一起做往复直线运动,在线圈两端产生感应电动势,通过外接馈能电路实现能量回馈。在电动模式下,电磁直线作动器提供电磁推力来改善悬架系统的动态特性。本文研究电磁悬架主动控制方法时主要利用其电动模式电磁力的输出特性,根据电磁力与线圈电流的关系来实现悬架所需主动力的输出。电磁力与线圈电流的关系见图2,其中s为动子位移,mm。
21/4车辆主动悬架模型
2.1动力学模型
建立1/4车辆二自由度主动悬架动力学模型见图3。图3中EMLA是电磁直线作动器,ms和mr分别为簧上质量和簧下质量,xs,xr和q分别为车身位移、轮胎位移和路面位移,ks和kt分别为弹簧刚度和轮胎刚度,FM为作动器输出力。
3主动悬架控制系统
车辆在路面行驶时,在路面的激励下产生受迫振动。主动悬架LQG控制器根据实时的路面输入计算出主动悬架所需的最优主动力,从而得到线圈最优的输入电压,然后PID控制器控制驱动电路输出驱动电压并实时跟踪最优输入电压,使得电磁直线作动器产生悬架所需的主动力,最终实现悬架的主动控制[13-14]。
3.1基于LQG的主动悬架控制策略
由于车辆悬架设计的主要性能指标为车身垂直振动加速度、悬架动行程和轮胎动位移,所以选择系统状态变量X=[srxsxrq]T,输出变量Y=[sxs-xrxr-q]T。
根据式(1)、式(2)可得系统的状态空间方程为
3.2电磁直线作动器控制器
由于最优控制力也就是电磁直线作动器所要提供的最优电磁力,故将式(9)代入式(3)、式(4),可得电磁直线作动器在任意时刻线圈端的最优输入电压ua(t)。为了使作动器线圈端的输入电压达到理想值,设计了如图5所示的电磁直线作动器驱动电路。
3.3Fuzzy-PID控制器
传统PID控制器虽然结构简单、鲁棒性较好,但是由于车辆行驶工况复杂、路面输入随机、悬架所需的主动力实时改变,导致基于PID控制线圈电压的跟随型较差,控制精度较低。模糊控制无需要知道被控对象的物理模型,针对非线性系统具有较好的适应能力,对外界干扰具有较强的抑制作用,将模糊控制与PID控制相结合,综合二者的控制优点。采用模糊逻辑推理方法来整定PID参数,经模糊推理得到的结果不是直接作为系统的输出,而是用该结果来整定PID参数,再根据PID算法来决定系统的输出,其结构如图6所示。
4仿真与试验研究
4.1建模仿真分析
为了验证设计的电磁直线作动器的主动悬架的正确性和主动控制系统的有效性,运用MATLAB/Simulink对整个系统进行建模仿真,模型如图7所示。仿真车型的具体参数如表3所示。
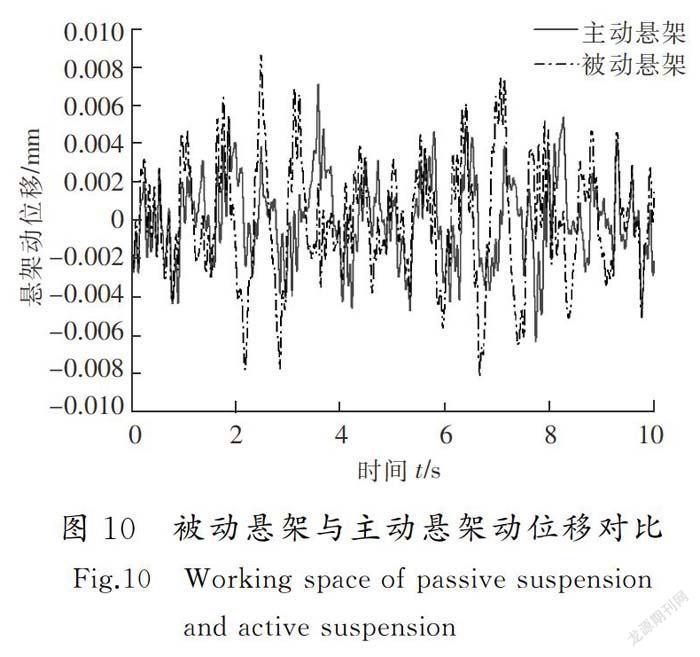
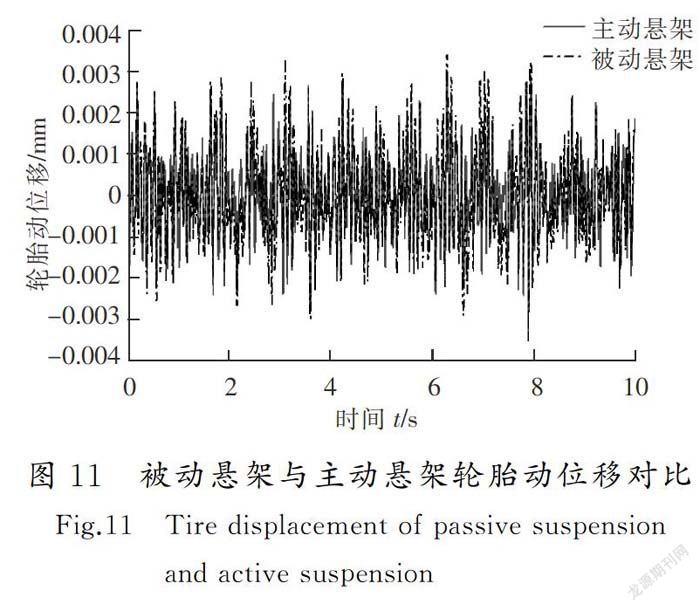
在B级路面20 m/s的路面输入下,将电磁直线作动器的主动悬架与被动悬架进行对比仿真分析。图8为最优主动力与实际输出电磁力的仿真结果,图9为被动悬架与主动悬架的车身加速度对比结果,图10为被动悬架与主动悬架动位移的仿真结果,图11为被动悬架与主动悬架轮胎动位移仿真结果,表4為3个参数均方根值的对比结果。
由以上的仿真结果可以看出,本文设计的电磁直线作动器极大地提高了车辆行驶的平顺性,减缓了车身振动。与传统的被动悬架相比,电磁主动悬架的车身垂直加速度和簧载质量位移都有明显的改善。由仿真结果计算可知,主动悬架的车身垂直加速度、车身动位移和轮胎动位移的均方根值相比于被动悬架分别下降了30.3%,33.3%和18.2%。
4.2试验验证
为了验证控制系统设计的正确性和可靠性,本文进行了1/4悬架模型样机台架搭建,并针对其减振效果进行了原理性验证实验,图12为试验装置结构简图。
采用DSP F2812数字信号处理器作为控制器,设定其采样频率为10 kHz,并根据采样结果输出相应占空比的PWM波,再经TX-DA962D4 IGBT驱动板驱动H桥电路。采用苏州苏试试验仪器股份有限公司的DC-3200-36系列电动振动试验系统作为激励源,该系统由试验台、功率放大器和振动控制仪组成。其振动频率可以达到2 500 Hz,最大可以承受500 kg的负载,但该激振台无法产生路面激励,所以本实验利用正弦波激励对电磁主动悬架的减振特性进行原理性验证,图13为现场试验图。其中,试验台架的底座固定在激振台上,激振台所产生的激励通过一个模拟轮胎刚度的空气弹簧作用于簧下质量块。
一般路面振动输入的频率范围为0.5~25 Hz,由于乘员对于垂直振动敏感的频率范围为4~8 Hz,故分别控制激振台的激励频率为5,6,7 Hz,加速度为0.1g~1.0g,利用本文所提出的控制方法,观察簧下质量与簧上质量加速度的变化。
由图14—图16可知,簧上质量加速度要小于簧下质量加速度,在0.8g加速度的激励下,5~7 Hz簧上质量加速度比簧下质量加速度降低13.4%,17.11%,21.5%;在0.9g加速度的激励下,5~7 Hz簧上质量加速度比簧下质量加速度降低33.3%,34.5%,37.5%;在1.0g加速度的激励下,5~7 Hz簧上质量加速度比簧下质量加速度降低55.6%,79.9%,67.0%。由此可知,本文提出的电磁主动悬架控制方法是正确可靠的,同时还极大地改善了车辆动态特性。
5结语
根据某款汽车的悬架参数,设计了电磁直线作动器代替其阻尼器,并利用LQG控制器得到最优主动力。结合模糊控制与PID控制的优点设计Fuzzy-PID控制器,控制作动器驱动电路,从而实现控制输出的电磁力。利用MATLAB/Simulink进行建模仿真分析,对电磁直线作动器悬架平顺性进行研究。结果表明,车身加速度、车身动位移和轮胎动位移的均方根值较被动悬架降低约30.3%,33.3%和18.2%,车辆的平顺性和舒适性都得到了较大的提高,并且通过台架试验验证了本文提出的电磁直线作动器的主动悬架控制系统的正确性和可靠性。
本文只是针对电磁直线作动器作为电动机提供主动力,提高车辆的减振效果进行了研究分析,并未考虑电磁直线作动器作为发电机时的能量回收问题,未来需对其能量回收问题进行深入研究。
参考文献/References:
[1]喻凡,曹民,郑雪春.能量回馈式车辆主动悬架的可行性研究[J].振动与冲击,2005, 24(4):27-30.
YU Fan, CAO Min, ZHENG Xuechun. Feasibility study on active suspension of energy feedback vehicle[J]. Journal of Vibration and Shock, 2005, 24(4):27-30.
[2]WANG J B, WANG W Y. A linear permanent-magnet motor for active vehicle suspension[J]. IEEE Transactions on Vehicular Technology,2012, 60(1): 55-63.
[3]GYSEN B L J, VAND S T P J, PAULIDES J J H, et al. Efficiency of a regenerative direct-drive electromagnetic active suspension[J]. IEEE Transactions on Vehicular Technology,2012, 60(4):1384-1393.
[4]喻凡,張超勇,张国光.车辆电磁悬架技术综述[J].汽车工程,2012,34(7):569-574.
YU Fan, ZHANG Chaoyong, ZHANG Guoguang. Review on vehicle electromagnetic suspension technology[J]. Automotive Engineering, 2012,34(7):569-574.
[5]罗虹,陈星,邓兆祥,等.主动悬架的直线电机作动器控制系统研究[J].系统仿真学报,2012, 24(7):1537-1542.
LUO Hong, CHEN Xing, DENG Zhaoxiang, et al. Research on control system of linear motor actuator used in active suspension[J]. Journal of System Simulation, 2012, 24(7): 1537-1542.
[6]汪若尘,谢健,叶青,等.直线电机式主动悬架建模与试验研究[J].汽车工程,2016, 38(4):495-499.
WANG Ruochen, XIE Jian, YE Qing, et al. Modeling and experimental study of active suspension with linear motor[J]. Automotive Engineering, 2016, 38(4): 495-499.
[7]汪若尘,钱金刚,施德华,等.直线电机馈能悬架半主动控制特性的仿真分析[J].广西大学学报,2015, 40(5):1102-1108.
WANG Ruochen, QIAN Jingang, SHI Dehua, et al. Simulational analysis of semi-active control characteristics of energy-regenerative suspension with linear motor[J]. Journal of Guangxi University, 2015, 40(5): 1102-1108.
[8]来飞.基于电磁作动器的车辆主动悬架研究[D].重庆:重庆大学,2011.
LAI Fei. Research on Vehicle Active Suspension with Electromagnetic Actuator[D]. Chongqing: Chongqing University, 2011.
[9]来飞,黄超群.采用电磁作动器的车辆主动悬架的研究[J].汽车工程,2012, 34(2):170-174.
LAI Fei, HUANG Chaoqun. An investigation into vehicle active suspension with electromagnetic actuator[J]. Automotive Engineering, 2012, 34(2):170-174.
[10]GYSEN B L J, PAULIDES J J H, JANSSEN J L G. Active electromagnetic suspension system for improve vehicle dynamics[J]. IEEE Transaction on Vehicular Technology, 2010, 59(3): 1156-1163.
[11]GYSEN B L J, JANSSEN J L G, PAULIDES J J H. Design aspects of an active electromagnetic suspension system for automotive applications[J]. IEEE Transaction on Industry Applications, 2009,45(5):1589-1597.
[12]张博.基于动磁式直线振荡电机的直线压缩机技术的研究[D].南京:南京理工大学,2015.
ZHANG Bo. Research on Linear Compressor Technology Based on Dynamic Magnetic Linear Oscillation Motor[D]. Nanjing: Nanjing University of Science and Technology, 2015.
[13]闫光辉,关志伟,杜峰,等.车辆主动悬架自适应 LQG控制策略研究[J].机械科学与技术,2014, 33(3):432-437.
YAN Guanghui, GUAN Zhiwei, DU Feng, et al. Study on the control strategy of adaptive LQG for active suspension vehicle[J]. Mechanical Science and Technology for Aerospace Engineering, 2014, 33(3): 432-437.
[14]郝莉紅,王志腾,陈洪.基于Matlab\Simulink对半主动悬架的Fuzzy-PID控制仿真研究[J].河北工业科技,2013, 30(1):42-46.
HAO Lihong, WANG Zhiteng, CHEN Hong. Simulation of Fuzzy-PID control of semi-active suspension based on Matlab\Simulink[J]. Hebei Journal of Industrial Science and Technology, 2013, 30(1): 42-46.
[15]陈士安,邱峰,何仁,等.一种确定车辆悬架 LQG控制加权系数的方法[J].振动与冲击,2008, 27(2):65-68.
CHEN Shian, QIU Feng, HE Ren, et al. A method for determining the weighting coefficient of LQG control used in suspension system[J]. Journal of Vibration and Shock, 2008, 27(2): 65-68.
[16]罗鑫源,杨世文.基于AHP的车辆主动悬架LQG控制器设计[J].振动与冲击,2013, 32(2):102-106.
LUO Xinyuan, YANG Shiwen. Design of a LQG controller for a vehicle active suspension system based on AHP[J]. Journal of Vibration and Shock, 2013,32(2):102-106.
