轮毂电机电动汽车电子差速低速转向控制仿真
2018-09-10华磊张成涛陆文祺王佳奇
华磊 张成涛 陆文祺 王佳奇
摘 要:针对轮毂电机独立驱动电动汽车电子差速的问题进行研究,通过对轮毂电机驱动和传统汽车的差速装置驱动进行比较分析.根据阿克曼汽车转向模型和各个轮毂电机独立可控,提出基于MATLAB /simulink搭建汽車理想状态下的转向仿真建模.仿真结果表明:Ackermann-Jeantand转向几何模型可以计算出给定方向盘角度下的各个车轮的实际速度,进而分别控制各个轮毂电机的转速实现电动汽车电子差速的目的,满足汽车低速转向的要求,对进一步研究电动汽车独立转向电子差速等问题具有一定的借鉴意义.
关键词:轮毂电机;电子差速;MATLAB/Simulink 仿真
中图分类号:U469.720.3 DOI:10.16375/j.cnki.cn45-1395/t.2018.03.012
0 引言
日益严重的环境污染和能源短缺等问题给汽车行业带来了巨大的影响,发展纯电动汽车被世界各国广泛认为是解决环境污染最有效的方式之一[1].轮毂电动汽车采用轮毂电机直接驱动车轮转动,各个车轮独立可控,动力传动的硬件连形式改为软连接形式,跟传统的内燃机相比,减少了离合器、差速器、传动轴等传动装置,使得汽车结构大为简化,整车质量减轻,提高了传动效率,满足电动汽车发展的新方向[2].
孙明江[3]通过CarSim软件和MATLAB/simulink软件对电动汽车差速进行联合仿真,以采集轮速控制模块和目标转速之差作为输入,采用PID控制算法,计算出各个车轮所需的驱动力矩.实验结果表明提高了电动汽车的稳定性,最终实现电动汽车电子差速.丁张根等[4]提出CANoe和MATLAB联合仿真,能够实现电动机正反转、转速控制.对研究轮毂电机电动车电子差速控制奠定了良好的基础.
本文以阿克曼转向原理计算出左右车轮所需的转速,结合文献[4]实现的节点之间通讯快速、稳定、可靠,可以实现整车控制器控制各个轮毂电机的转速.在MATLAB/simulink中建立电动汽车低速、静态转向的仿真模型,在实验仿真中要求车速不高于16 m/s,实验仿真结果表明四轮轮毂电机在电动汽车低速转向中满足实验要求.但是阿克曼转向原理也存在弊端,电动汽车在转向角为20°时右前车轮仿真转速为16.5 m/s,超过电动汽车实际最高转速16 m/s,不符合实验要求.
1 轮毂电机电动实验车结构简图
轮毂电机电动汽车结构简图如图1所示,由4块12 V的铅酸蓄电池串联为48 V作为整车的主电源,分别给4个650 W的轮毂电机供电,每个轮毂电机独立可控,当控制器接收来自驾驶员的操作命令,并做出相应的反应.汽车转向时控制器采集方向盘转角,求出左右车轮转向角度,根据阿克曼转向模型控制算法计算出各个车轮的速度,主控制器向各个轮毂电机控制器发出控制命令,无刷控制器调整相应电机的转速,达到电子差速低速转向的功能[5].
2 电动汽车电子差速分析
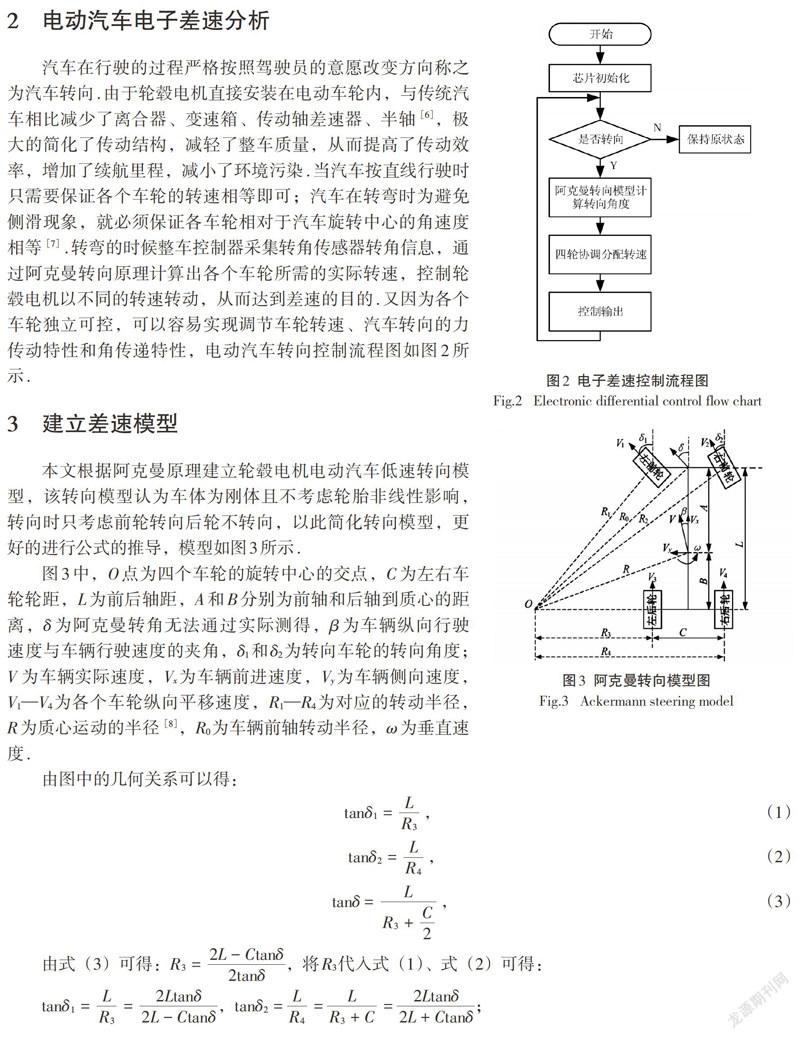
汽车在行驶的过程严格按照驾驶员的意愿改变方向称之为汽车转向.由于轮毂电机直接安装在电动车轮内,与传统汽车相比减少了离合器、变速箱、传动轴差速器、半轴[6],极大的简化了传动结构,减轻了整车质量,从而提高了传动效率,增加了续航里程,减小了环境污染.当汽车按直线行驶时只需要保证各个车轮的转速相等即可;汽车在转弯时为避免侧滑现象,就必须保证各车轮相对于汽车旋转中心的角速度相等[7].转弯的时候整车控制器采集转角传感器转角信息,通过阿克曼转向原理计算出各个车轮所需的实际转速,控制轮毂电机以不同的转速转动,从而达到差速的目的.又因为各个车轮独立可控,可以容易实现调节车轮转速、汽车转向的力传动特性和角传递特性,电动汽车转向控制流程图如图2所示.
3 建立差速模型
本文根据阿克曼原理建立轮毂电机电动汽车低速转向模型,该转向模型认为车体为刚体且不考虑轮胎非线性影响,转向时只考虑前轮转向后轮不转向,以此简化转向模型,更好的进行公式的推导,模型如图3所示.
图3中,O点为四个车轮的旋转中心的交点,C为左右车轮轮距,L为前后轴距,A和B分别为前轴和后轴到质心的距离,δ为阿克曼转角无法通过实际测得,β为车辆纵向行驶速度与车辆行驶速度的夹角,δ1和δ2为转向车轮的转向角度;V 为车辆实际速度,Vx为车辆前进速度,Vy为车辆侧向速度,V1—V4为各个车轮纵向平移速度,R1—R4为对应的转动半径,R为质心运动的半径[8],R0为车辆前轴转动半径,ω为垂直速度.
由图中的几何关系可以得:
计算出各个车轮的转速,就可以设计相应的硬件设计和软件仿真实验.
4 基于MATLAB/simulink建模仿真及结果分析
4.1 仿真建模
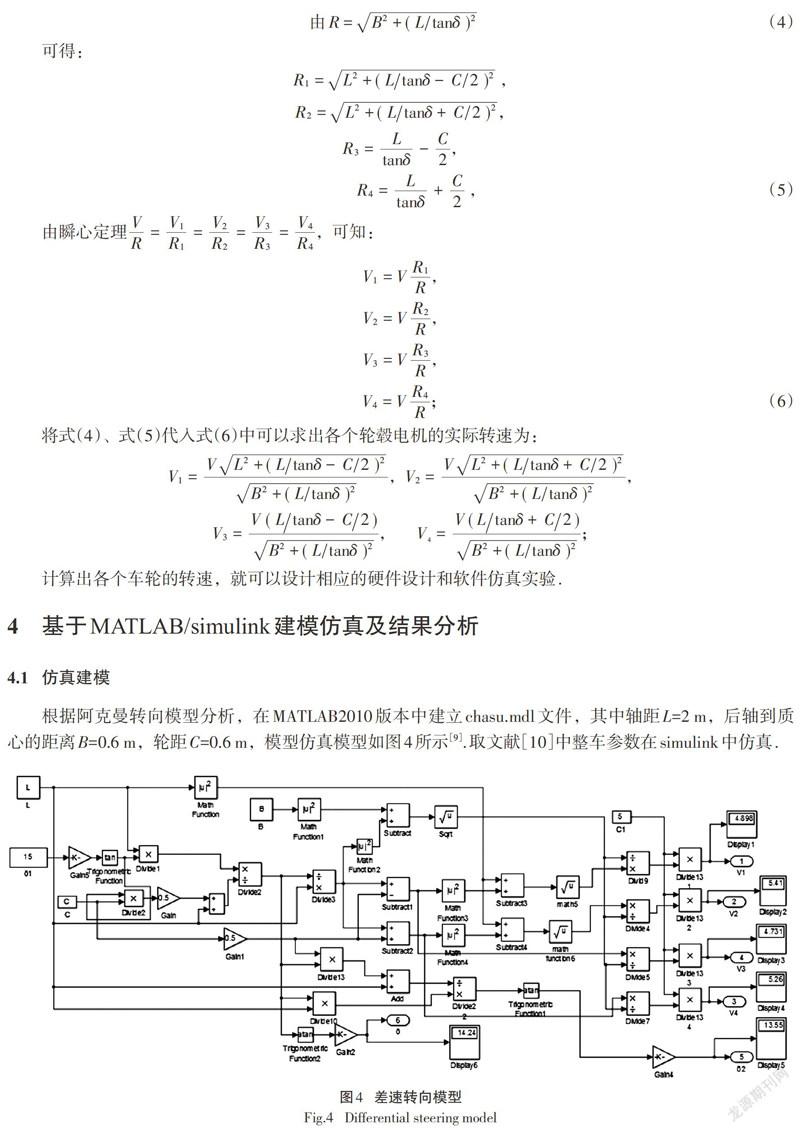
根据阿克曼转向模型分析,在MATLAB2010版本中建立chasu.mdl文件,其中轴距L=2 m,后轴到质心的距离B=0.6 m,轮距C=0.6 m,模型仿真模型如图4所示[9].取文献[10]中整车参数在simulink中仿真.
4.2 仿真结果
在输入不同车速时,以左轮转向角度为参照,记录下不同车速对应不同转向角下的车速在MATLAB中仿真得出4个车轮的转速如图5—图7所示.其中图5—图7左侧图为L=2.00 m,B=0.60 m,C=0.60 m所仿真的结果图;右侧图为L=2.70 m,B=1.45 m,C=1.56 m所仿真的结果图.
在模型中输入不同的车速和转角,就可以得出相对应各个车轮的车速.由图可知在电动车左转向的时候,其车速是外侧车速大于内侧车速,满足[V=ω*R].在通过整车控制器控制电机控制器输出相应的电机转速,从而实现电子差速和转向.
5 结论
根据MATLAB/simulink仿真结果可知,这种仿真模型适合于低速、静态下的电动汽车转向仿真,且电动汽车四轮车速不同达到差速的目的,为电子差速控制提供可靠理论依据.从不同的车型仿真对比中可以发现当车辆转向的时候外侧转速大于内侧转速,符合车辆转向实际情况.当车轮转向角、转速达到一定值时,外侧车轮速度将保持不变.如转向角为20°时,输入车速为15 m/s的时候,仿真得出右前轮车速为16.5 m/s超过实际车轮最大转速16 m/s,在继续增大转向角度和输入车速对设计的低速差速器没有太大意义,同时电动车差速效果差且出现车轮打滑现象.从实验也证明了阿克曼原理适合于低速转向.
参考文献
[1]蒋鸣雷,张欣,杨庆保. 纯电动汽车低速转向差速控制方法研究[J]. 北京汽车,2014(2):20-23.
[2]李周清. 外转子永磁轮毂电机的设计研究[J]. 机电工程技术,2012,41(3):1-6.
[3]孙明江. 轮毂电机电动汽车电子差速控制研究[D].锦州:辽宁工业大学,2016.
[4]丁张根,罗文广. 基于CANoe-MATLAB的电动机仿真控制的研究[J]. 广西科技大学学报,2014,25(2):58-63.
[5]杨庆保. 纯电动汽车整车控制器研究[D].北京:北京交通大学,2012.
[6]沈世辉,段静,史添添,等. 四轮毂驱动电动汽车电子差速控制的研究[J]. 南阳理工学院学报,2016,8(6):38-42.
[7]赵艳娥,张建武. 轮毂电机驱动电动汽车电子差速系统研究[J]. 系统仿真学报,2008,20(18):4767-4771.
[8]杨庆保. 纯电动汽车整车控制器研究[D].北京:北京交通大学,2012.
[9]靳彪,张欣,杨庆保. 纯电动汽车低速转向差速控制模型[J]. 北京交通大学学报,2013,37(4):158-161.
[10]方春杰. 纯电动汽车质心侧偏角估计及仿真分析[J]. 汽车工程师,2017(11):34-37.