自动定向仪故障分析
2018-09-10唐福军丛志民
唐福军 丛志民

摘要:首先将振幅式自动定向仪与相位式自动定向仪的工作原理进行对比,从修理的角度看待二者的不同之处,提出在修理中遇到故障时的基本分析思路;以国内运输机上使用最广泛的WL-7(振幅式)和WL-7B(相位式)型自动定向仪为例,介绍了实际修理中自动定向速度慢和定向误差大故障的排除过程。
关键词:自动定向仪;定向速度;定向误差
0引言
目前,国内运输机中使用的自动定向仪型号众多,如WL-7、A P K-15M、WL-7B、WL-11/11A、ADF-60、ADF650/650A等。从工作原理来看,自动定向仪可以分为振幅式和相位式两种,前者包括WL-7、A P K-15M,后者包括WL7B、ADF-60、ADF-650/650A、WL-11/11A。从功能上可分为“收讯”和“罗盘”两种工作状态,“收讯”状态的自动定向仪实际是中长波收讯机,“罗盘”状态可看成是在“收讯”的基础上增加了定向系统。在“收讯”方式,接收中长波电台信号,输出音频信号;在“罗盘”方式,接收导航台信号,能连续自动地指示出航向角(即相对方位角,是飞机纵轴与电台方向之间的角度),同时输出音频信号,引导飞机进行航线或进场飞行。
1自动定向仪的工作原理
振幅式自动定向仪通过环形天线和垂直天线方向性图叠加后形成的心脏形图的交替变化测定调制度的方法来进行定向,典型产品是WL-7型自动定向仪和APK-15M型自动定向仪。振幅式自动定向仪的基本原理框图如图1所示。
由图1可知,环形天线与测角器组成的系统输出横8字型方向性图的感应信号,经移相90°、平衡调制后,与垂直天线感应信号叠加,叠加后的信号经接收机处理后取出135Hz信号(可变相信号)加到伺服电机,与固定相的135Hz信号共同作用于伺服电机。因测角器、伺服电机、同步发送器、航向指示器是同步转动,故航向指示器指示出相对方位角。
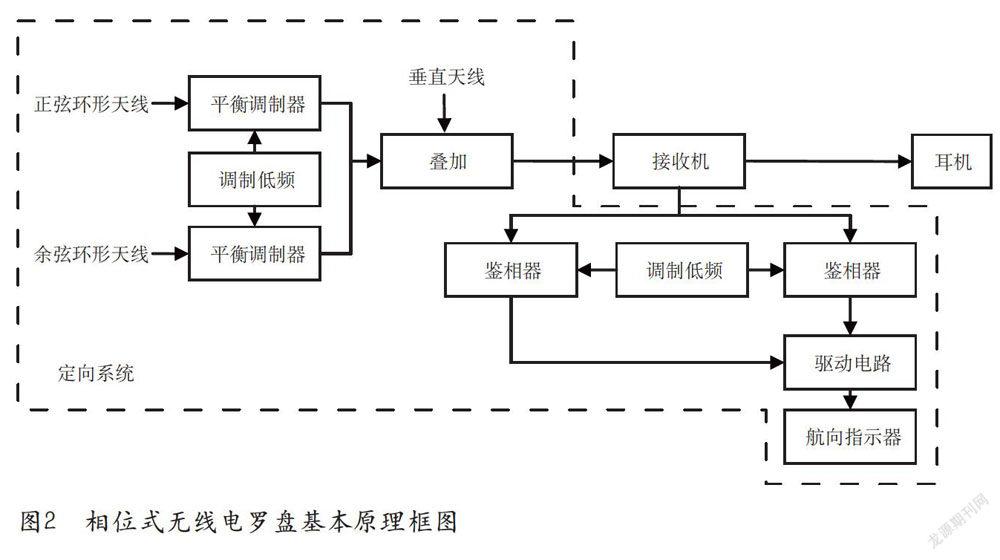
相位式自动定向仪的基本原理框图如图2所示,其定向的基本原理:正弦环形天线与余弦环形天线接收到的信号分别被低频(如80Hz)调制信号调幅,两个调制信号相位相差90°。经调制后的两个信号合成后产生一个组合调制信号。组合调制信号与垂直天线信号叠加,其叠加信号的外包络相位包含相对方位信息。经接收机相干检波后输出外包络复合音频(含有方位信息),再由微处理器采用相关技术与低频(80Hz)调制信号进行鉴相,以确定飞机与地面电台的相对方位角。
由此可见,两者存在明显的不同。首先,振幅式自动定向仪在整体上通过伺服电机形成一个闭环,伺服电机带动测角器转动,改变可变相信号大小,直至定向为止,即在定向过程中定向信号是变化的。因此,在修理中,给定方位后,跟踪可变相信号和固定相信号对判断定向系统的故障很重要;相位式自动定向仪的定向过程分为相对独立的两个部分——叠加前和叠加后,给定方位后,叠加信号含有的方位信息确定,在叠加后通过鉴相器还原方位信息,即给定方位后,定向系统各节点的波形是确定的,修理中可直接检查。其次,在结构上,振幅式自动定向仪使用测角器、伺服电机、同步发送器及传动部分等转动部件,是机电一体化的产品,体积较大,即使接收机部分的频率合成器采用数字电路、调谐部分使用变容二极管后,整个罗盘的体积仍比较大,长时间使用后易出现机械故障;相位式自动定向仪使用数字技术,如采用微处理器和数字集成电路等,不采用测角器,体积很小,故障率相对也较小。
下面以国内运输机上使用最广泛的WL-7-6A自动定向仪接收机(振幅式)和WL-7B自动定向仪接收机(相位式)为例,研究其修理中经常遇到的两种故障的实际排除过程。
2故障分析和排除
2.1故障分类
自动定向仪经常出现的故障一般可以分为三类:自动调谐系统的故障、收讯系统的故障和定向系统的故障。在采用数字电路和变容二极管后,自动调谐系统和收讯系统已发展为纯电子系统,且定向系统各型号产品的定向原理也不相同。因此,在修理中应明确基本分析思路,运用于由定向系统引起的定向速度慢、定向误差大等故障的排除过程中。
2.2自动定向速度慢
1)在WL-7-6A自动定向仪接收机通电检查时,自动定向速度为2.8s,虽然在技术要求范围内,但比一般数据2.1s的指标要差,明显感觉速度慢;手控定向时,定向速度为5.5s(控制盒的“手控”旋钮旋至最大时),比一般数据Ss的指标要差,速度明显慢。
根据故障现象分析,虽然WL-7-6A自动定向仪接收机的定向系统分布在高频组件、中频组件、测向组件等几个组件上,但根据手控定向也慢这个现象判断,故障应在测向组件上,而且应在自动定向和手控定向的公用部分。因为,自动定向与高频组件、中频组件、测向组件都有关,具体可从图1的原理分析得知;但手控定向实际上只有测向组件和控制箱起作用,与高频组件、中频组件无关,经串件后确认故障在测向组件上。
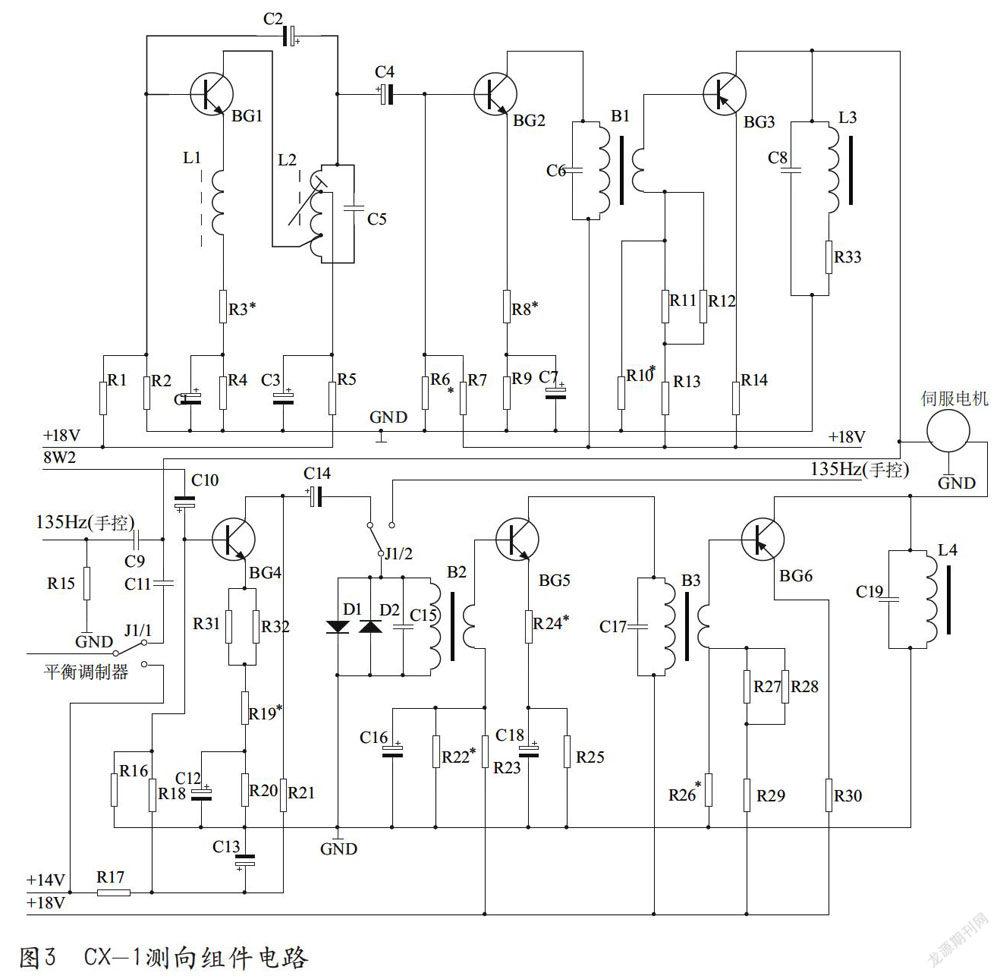
WL-7-6A自动定向仪接收机的CX-1测向组件电路如图3所示。自动定向和手控定向的公用部分有固定相、可变相、伺服电机等几个部分。首先,檢查伺服电机,电机的R1·3=R2·4=35.5Ω(正常应为35±2Ω),检查合格。怀疑伺服电机的机械部分阻尼增大,造成定向速度变慢,但经清洗和更换电机后情况并无改善;其次,检查手控定向时2BG3“C”集电极固定相的135Hz信号波形、2BG6“C”集电极的可变相135Hz信号波形,发现固定相波形幅度和可变相波形幅度也比正常时均偏小。固定相和可变相的电路结构相似,均有电压放大电路和功率放大电路,并且每个电路中都有可调元件,虽然出厂时已经选定元件,但修理中可以调整,以适应元器件由于长时间使用后性能变化而造成回路失谐。调整2R8,使电压放大器2BG2“C”的输出电压最大;调整2R10,使功率放大器2BG3“C”输出电压最大。调整后,手控时的固定相和可变相135Hz信号波形幅度没有明显变化,手控定向速度也没有改善。
固定相和可变相两路输出信号的幅度经调整后仍比正常时小,表明故障应在之后的电路中,也就是说功放电路的功放管放大倍数下降(用数字多用表测量该功放管各极的结电压正常)导致驱动能力不足,更换2BG3功放管后,两路信号的幅度恢复正常,自动定向速度达到2.1s,手动定向速度达到5s,故障排除。
2) WL-7B自動定向仪Ⅱ、Ⅲ波段定向速度慢,其他五个波段定向正常。
根据故障现象,通过串件排除了控制盒可能出现故障的情况,重点检查接收机的A3通道板和A4频率合成器板(具体线路图见WL-7B型自动定向仪技术说明书)。
首先,用示波器检查A4频率合成器板的一本振(15.150~16.7495MHz)、二本振(18.6MHz)频率和幅度,均正常;检查波段逻辑控制电路输出的控制关系,正常。因此,排除了频率合成器板故障的可能。接下来,检查A3通道板,从线路图分析得知:当自动定向仪接收机选定某频率时,频率合成器板中的逻辑电路根据控制箱所设定的接收频率给出1个“1”电平和6个“0”电平的逻辑控制,逻辑“1”对应于七个波段中的一个,使波段逻辑控制电路的N1中的一个晶体管饱和导通,提供一个接地回路,使一对输入/输出二极管开关(V4/V5、V6/V7、V8/V9、VlO/Vll、V12/V13、V15/V16)接通,将相应的射频带通滤波器接入电路,其余的6个射频带通滤波器由于其对应的一对输入/输出二极管反偏而使信号通路截止。检查V6/V7、V8/V9的正向电阻为∞,即由于二极管开路,造成Ⅱ、Ⅲ波段的信号不能通过。更换这四个二极管开关后,故障排除。
2.3定向误差大
1) WL-7-6A自动定向仪接收机定向误差大,无法校罗差
通电检查发现,自动定向输入5mV的大信号时,对不准零刻度,误差为±2°,并且每次定向的位置不完全相同,有回差;在测量小信号输入时的定向灵敏度时,指针摆动偶尔超差。
根据前面分析可知,自动定向与高频组件、中频组件、测向组件都有关,重新统调高频组件、中频组件,故障现象依旧,因此断定测向组件发生故障,用串件法确认故障在测向组件上。检查测向组件自动定向时的两路135Hz信号,未发现异常,表明各信号电路工作正常。
信号电路工作正常而定向误差不合格,最可能的故障部件是测向组件几个转动器件和传动齿轮。拆开测向组件上盖板,取出同步发送器和测角器之间的传动齿轮,由原理可知此时的罗盘仍能自动定向,但是用接收机自带的刻度盘可以指示方位,却没有向外接的航向指示器的输出。安装测角器上的刻度盘,输入5mV的大信号时,故障现象依旧,说明同步发送器及传动齿轮正常。自动定向过程中检查插头6脚的波形调制度,正常,再次确认同步发送器的功能正常;更换伺服电机,故障现象未变;更换测角器后,误差不到0.5°,工作正常。
仔细检查更换下来的测角器,发现由于测角器固定销与转轴上的固定孔配合不当,造成固定在测角器转轴上的齿轮松动,进而导致在大信号输入时定向指针由于惯性对不准零度,并且出现回差;在定向灵敏度(小信号输入)时,指针的摆动和齿轮的松动使摆动偶尔超差。
2) WL-7B自动定向仪接收机定向误差达90°
从故障现象、图2以及对内部线路图的分析得知,环形天线感应的电势与垂直天线感应的电势相差的相位差为90°,因此在环放(位于环匹配器内,是WL-7B自动定向仪的一个组成部分)中除了放大功能外还有将信号相位移90°的功能,因此环放信号与垂直天线信号同相或反相,在叠加回路(位于天线放大器内)上,两信号叠加,在80Hz的一个半周,若两信号同相则增强,而在80Hz的另一个半周,两信号则因反相而抵消。因此,输入到超外差设接收机的信号是一个80Hz矩形调制波,其调制度决定于环放信号及垂直天线信号的相对大小。罗盘接收机与一般的超外差设接收机类似,输入信号经过二次变频、放大和检波后得到低频信号,经80Hz选频电路将80Hz信号从检波的低频信号中分离出来,经过放大和调制,驱动指示器。但指示器转到环放信号为0时,电路中仅有垂直天线信号,因而检波后80Hz信号为0,指示器指针便指出电台的方位角。
经过串件,排除了环匹配器故障的可能,故障锁定在接收机内。接收机的同步检波器是一个锁相环检波器,脉冲调制鉴相器比较第二中频和VCO基准信号的相位。如果两个信号相位相同,则误差信号均值为0V,中频信号由脉冲调制鉴相器的基准方波调制,给VCO提供误差电压。如果中频信号相位移移动,则误差电压不是0,此误差电压调整VCO信号频率,使其重新稳定在与中频信号同相的相位关系上,误差电压再次回到OV。中频信号在被移相90°后,加至振幅鉴相器中。鉴相器N5是一个解调器,包括一个鉴相器和3.6MHz的VCO电路,3.6MHz的第二中频信号加至N5的第13脚和第14脚,14脚的信号经过衰减和85。的移相,13脚的信号也被移相-5°,这样13脚和14脚的两路信号就有90°的相位差。经以上分析得知,故障应是由鉴相器或是移相电容失效所致。检查移相电容(85°移相器)、C52(-5°移相器),发现C51容量已明显偏小,更换后故障排除。
3结束语
通过对比振幅式自动定向仪和相位式自动定向仪的基本工作原理,得到排故时的基本分析思路:振幅式应跟踪定向信号的变化,并注意机械故障;而相位式直接检查节点即可。由两类排故过程可知,思路清晰、并采用具体方法将有助于排除故障。
若遇到自动定向仪接收机自动定向速度慢的故障时,应根据罗盘的种类具体分析,例如,对于WL-7型自动定向仪,首先应检查手动定向是否正常,然后检查测向组件的固定相、可变相这两路信号的输出幅度是否正常,最后再考虑伺服电机、高频组件、中频组件等的情况;对于WL-7B型自动定向仪(由于整机是纯电子系统,不存在机械调谐等问题),应首先判断是否所有波段都不正常,若仅仅是个别波段不正常,则重点检查波段逻辑控制电路和带通滤波器。
若遇到自动定向仪接收机定向误差大时,对于WL-7型应首先固定CX-1测向组件转轴,转动小刻度盘,感觉及观察齿轮是否松动,判断测角器是否正常,然后判断同步发送器是否正常,最后再考虑伺服电机、统调高频组件、中频组件等的情况;对于WL-7B型自动定向仪,则应根据误差的大小判断是属于环匹配器问题还是接收机本身的问题,若是接收机问题,重点检查鉴相器的两个移相电容,以提高排故的质量和效率,达到事半功倍的效果。
参考文献
[1] WL-7型自动定向仪使用说明书[Z].
[2] WL-7B型自动定向仪技术说明书[Z].国营第七六五厂,2003.
[3] ADF-60自动测向仪系统说明书(修理手册)[Z].Rockwell Collins,1994.
[4]某型飞机无线电设备讲义(APK15M无线电自动罗盘)[Z].1995.
