某型空空导弹陀螺安装调试功能的设计与实现
2018-09-10汪小龙郭来军王婷婷石剑平
汪小龙 郭来军 王婷婷 石剑平


摘要:某型空空导弹惯性测量陀螺单元故障率较高,陀螺单元中的陀螺出现故障后需要更换并进行安装调试。针对此维修需求,对原惯性测量单元检测系统进行了升级改造,实现了惯性测量陀螺单元中的陀螺安装调试功能。升级改造后的系统工作稳定可靠,并且能够快速有效地完成导弹惯性测量陀螺的安装调试,大幅提高了该型空空导弹的维修效率。
关键词:陀螺单元;安裝;调试;设计
0引言
某型空空导弹的惯性测量陀螺单元故障率高,陀螺单元故障后需对陀螺元件进行更换并安装调试,但陀螺安装调试要求高,调试困难,调试周期长。针对此情况,对原惯性测量单元检测系统进行了升级改造,增加了陀螺安装调试功能,将合格陀螺装配至惯性测量分组件内进行调试,调试完成后安装到测试夹具上进行测试,根据测试结果判定调试情况并修正,省去了多次的安装和拆卸,大大缩短了调试时间,提高了工作效率。
1陀螺单元功能
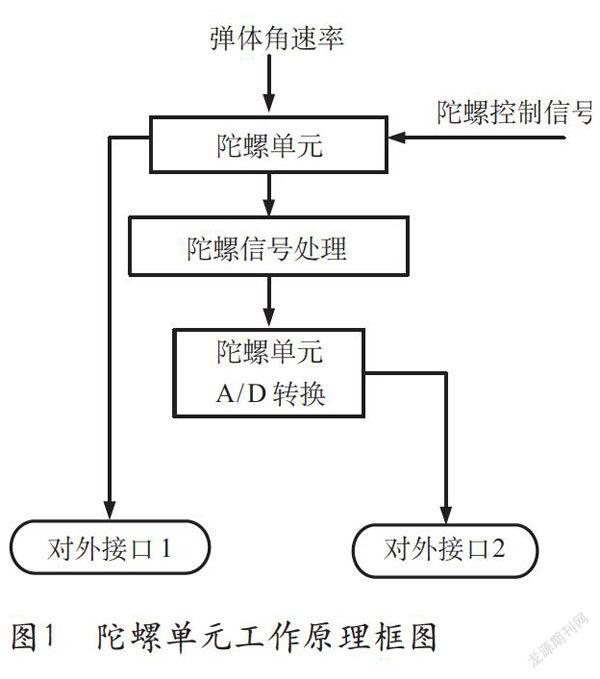
该型空空导弹惯性测量陀螺单元直接安装在弹体上。每发惯性测量组件陀螺单元中都包含3个陀螺,陀螺主要是用于测量导弹在弹道中的飞行姿态,其原理框图如图1所示。
陀螺单元的3个陀螺分别测量导弹在弹道中飞行过程三个方向的姿态角。陀螺输出相对于惯性空间的姿态角速率,以脉冲的形式进行输出,单位时间输出的脉冲数分别与弹体相对于惯性空间的姿态角速率有关。每个陀螺输出的脉冲信号,最终分别输入弹载计算机中,弹载计算机利用计算机误差补偿软件对姿态误差进行补偿,用补偿后的角增量进行姿态、导航计算。
2硬件组成
该型空空导弹惯性测量陀螺单元的安装调试功能是在原惯性测量单元检测系统硬件基础上实现的,检测系统主要由主控柜、PXI工控机、PXI控制器、高速示波器、模拟信号采集卡、电源控制卡、万用表卡、惯导测试卡、电压电流输出卡、软件、调理单元、电源单元、转台、转台控制机柜等组成,如图2所示。
2.1 PXI计算机总体结构
图3给出了PXI计算机总体结构图。
PXI总控计算机系统中的惯导测试卡是整个测试系统的核心板卡,主要产生陀螺模数变换同步信号,对陀螺的脉冲输出进行计数。
2.2转台
转台主要用来检测陀螺输出通道的性能。转台包含两个主要部分,即台体和测控机柜,如图4所示。台体部分是系统的最终执行机构,包含轴系、电机、测角传感器、工作台、限位机构等;工作台用于安装测试产品;测控机柜用来安放转台系统的控制部分,包括电源、测控计算机,用户可以使用键盘、鼠标输入各种控制指令,对转台系统进行操控。
3设计要求
该型空空导弹惯性测量陀螺的安装调试主要是使用检测系统对惯性测量组件进行动态检测。动态检测是对“六位置检测法”中的位置一、位置三、位置五进行检测,分别在每一个位置下通过主控系统来控制转台,使转台按规定要求以某设定速率进行转动,并准确记录各状态下每个陀螺输出的脉冲个数,从脉冲个数检验陀螺的安装可靠性。
3.1设计目的
在原检测系统硬件的基础上,重新设计惯性测量分组件测试夹具,对陀螺安装调试功能软件重新编程,实现陀螺单元安装调试功能。预计检测系统完成升级后改造后单个陀螺安装调试只需2小时,可节省大量人力物力,大幅提高陀螺安装调试效率。
3.2设计原则
在原检测系统的硬件和软件基础上增加陀螺安装调试功能,不改变原有检测系统的硬件及软件,且保持原有测试功能。
3.3技术要求
检测系统应能对陀螺位置进行在线调整,即当惯性测量分组件安装到测试夹具后,连同测试夹具再安装到转台上,运行“陀螺安装调试功能软件”,对惯性测量分组件进行测试,在此测试过程中,能够在不断开加温电流、不拆下产品的情况下实现对陀螺位置的调整。
3.4精度要求
设备脉冲计数通道的计数误差不超过理论值的1‰。
4夹具设计
在原检测系统现有硬件的基础上,根据某型空空导弹惯性测量分组件的测试要求,设计制作了一个专用夹具,夹具的外形是正立方体,便于多个方向的装夹;夹具内孔与导弹惯性测量分组件的外径精确配合;夹具侧壁有螺钉安装孔,模拟惯性测量分组件在导弹壳体上的安装方式。惯性测量分组件安装在夹具内,夹具在对应陀螺调整位置开有调整孔,使用时不用将惯性测量分组件取出就可对陀螺位置进行调整、测试。夹具图如图
5所示。
5软件设计
设计采用VC6.0平台下的MFC框架来开发测控软件,主要原因在于MFC框架适于上层界面开发,减少开发难度,缩短开发周期。MFC是微软公司推出的以C++为基础的图形化语言,是可用于创建应用程序的语言之一,使用MFC开发应用程序语法简单,调试简便,图形化资源丰富,扩展方便。MFC完全面向对象、基于组件编程,满足测控系统模块化、任务化对象设计要求。
根据MFC框架开发的诸多优点,结合原检测系统增加陀螺安装调试功能的具体要求,设计的测控软件运行于Windows XP操作系统,编译环境选用Visual C++6.0平台MFC框架。
5.1模块化设计
检测系统增加陀螺安装调试功能软件主要由产品测试模块、辅助功能模块、结果输出模块、人机界面模块等四个模块组成,具体的组织结构如图6所示。
产品测试模块:整个测试软件的核心模块之一,主要是针对产品进行动态测试,在动态测试过程中对惯性测量分组件陀螺安装调试进行检测。
辅助功能模块:包括系统测试状态的状态灯显示。
结果处理输出模块:包括表格输出模块、数据库管理模块等。
人机界面:提供界面友好、操作简单的人机界面。
5.2软件模块调用关系
测控系统软件主管理模块与各模块调用关系如下:
1)调用用户界面管理软件模块。
2)在通信指令格式数据结构表中存放指令。
3)调用主系统测试运行软件模块,对本地测试内容进行测试。
4)调用报表生成及输出软件模块。
5.3软件执行流程
陀螺安装调试功能测控系统软件的主要执行过程如图7所示。
6陀螺安装调试功能的实现
6.1调试流程图
图8给出了该型空空导弹惯性测量陀螺安装调试的流程图。
如图8所示,将更换陀螺元件后的惯性测量分组件按要求安装到测试夹具中,并用专用螺钉固定,将安装到夹具中的产品按照需要测试的相应位置安装到转台上。打开测试程序,给产品加温供电,达到加温时间后,检测系统给惯性测量组件加电,通过操作程序界面控制转台按照要求的速率点进行转动,采集主轴陀螺的输出脉冲数,判断输出脉冲数是否合格,若合格则调试结束,若不合格则根据输出脉冲数的变化转动陀螺一定的安装角度,重新给惯性测量分组件加电,通过操作程序采集主轴陀螺的输出脉冲,直到输出脉冲合格则调试完成。
6.2模拟效果
使用函数信号发生器模拟产品输出脉冲,输入至中频组件检测系统,检测系统按要求进行计数,结果见表1。从表1可以看出,检测系统能够满足方案中提出的脉冲计数通道计数要求(误差小于1‰)。
7结束语
通过此项目的实施,检测系统可对陀螺位置进行在线调试,即将惯性测量分组件安装到测试夹具后,连同测试夹具再安装到转台上,运行“陀螺安装调试功能软件”对惯性测量分组件进行测试,根据测试结果再次进行调试,重复进行调试、测试,省去了多次的安装和拆卸,将陀螺安装调试时间由以前的一天减少到2小时之内,大大提高了工作效率。
参考文献
[1]郭来军,彭书家,白洪梅,孙萍,尹君.弹载惯性测量单元检测系统的设计与实现[J].四川兵工学报,2014,4(35):15-18.
