基于纵侧向动力学控制的智能变道辅助系统
2018-09-08盛以成彭利明ShengYichengDingNingTaoYePengLimingHuangHe
盛以成,丁 宁,陶 冶,彭利明,黄 鹤 Sheng Yicheng,Ding Ning,Tao Ye,Peng Liming,Huang He
基于纵侧向动力学控制的智能变道辅助系统
盛以成1,丁 宁2,陶 冶2,彭利明2,黄 鹤2Sheng Yicheng1,Ding Ning2,Tao Ye2,Peng Liming2,Huang He2
(1. 上汽通用五菱汽车股份有限公司技术中心,广西 柳州 545007; 2. 合肥工业大学 汽车与交通工程学院,安徽 合肥 230009)
智能汽车驾驶作为一项代表性的高新技术集成载体,能够提高车辆行驶安全性并减轻驾驶员操作负担,并且能够有效缓解交通拥堵压力。由于我国道路环境复杂多变,驾驶员经常采取超车变道操作,使得机动车超车变道的安全问题尤为严峻。为此,辅助驾驶员安全地完成超车变道过程,提出了基于纵侧向动力学控制的智能变道辅助系统,以车辆实际速度与目标速度为参数,设计具有滑模控制特性的控制器。仿真结果与硬件在环台架测试结果表明,基于纵侧向动力学控制的智能变道辅助系统能够较为有效地提高驾驶安全性,减轻驾驶员操作负担。
智能汽车;纵侧向控制;变道辅助;硬件在环台架;人机交互
0 引 言
智能汽车作为当今汽车行业的前沿方向,因与各项高新技术紧密连接,已经成为许多国家的热门政策引导方向。我国《智能制造发展规划(2016-2020)》也明确了智能汽车的发展目标。由于智能汽车应用前景广阔,众多企业与高校纷纷开展深入的研究工作。欧美发达国家凭借深厚的汽车工业底蕴,在智能汽车领域起步早,研究深且成果丰富。近年来我国逐步加大了对智能汽车领域的研究力度,但与发达国家间的差距仍然存在。
利用车辆智能辅助系统帮助驾驶员更安全便捷地操纵车辆是智能汽车的重要内容,而在车辆超车过程中及时将车外环境信息传递给驾驶员,辅助驾驶员决策和实施转向操作是其中十分关键的研究问题。由于道路环境的复杂性,外部车辆行驶的不确定性以及驾驶员的驾驶风格各不相同,使得超车问题成为一个复杂、动态的问题,需要引入先进的控制理论,使系统能够达到预期的目标。
基于纵侧向动力学控制的智能变道辅助系统以电动助力转向系统、车道识别与保持系统等主动安全系统为基础,由驾驶员行为感知子系统、工况与车辆状态感知子系统、车辆控制子系统组成。根据车辆当前速度与目标速度之间的差值,并结合与障碍物的相对距离进行控制。针对不同情况下的超车问题,国外的研究成果相对丰富,提出了车道偏离预警系统(Lane Departure Warning,LDW)、换道辅助系统(Lane Change Assistance,LCA)、智能车速辅助系统(Intelligent Speed Assistance,ISA)、视觉增强系统(Vision Enhance,VE)等为驾驶员的操作提供建议或预警。国内比较完善的换道模型与预警系统有吉林大学的基于最小安全距离的换道模型、中国科学技术大学的基于驾驶员—车辆的模糊换道模型以及同济大学的在交通拥堵情况下的换道模型等,这些模型都取得了良好效果,但在辅助驾驶员决策与操作上的理论却不太完善。针对车辆的不同工况,在介绍智能变道辅助系统的基础上,推导超车距离的统一公式,并设计相应的控制策略和辅助操作理论,进行典型工况下的仿真分析并在搭建的硬件在环台架上进行验证。
1 智能变道辅助系统方案设计
1.1 辅助系统总体结构
智能变道辅助系统分为传感器输入层、控制决策层和执行层,具体由驾驶员行为感知子系统、工况与车辆状态感知子系统、通讯网络子系统和车辆控制子系统组成。驾驶员行为感知子系统由挡位位置传感器、转向灯系统、车道偏离预警系统等组成。工况与车辆状态感知子系统由前后4个77GHz毫米波雷达、车载摄像头、车速传感器、加速度传感器和加速踏板位置传感器等构成。通讯网络子系统包括CAN网络等。车辆控制子系统由电动助力转向系统(Electric Power Steering,EPS)、自动变速器控制单元(Transmission Control Unit,TCU)、电机控制单元(Motor Control Unit,MCU)和电子控制单元(Electronic Control Unit,ECU)等构成。系统总体结构如图1所示[1]。
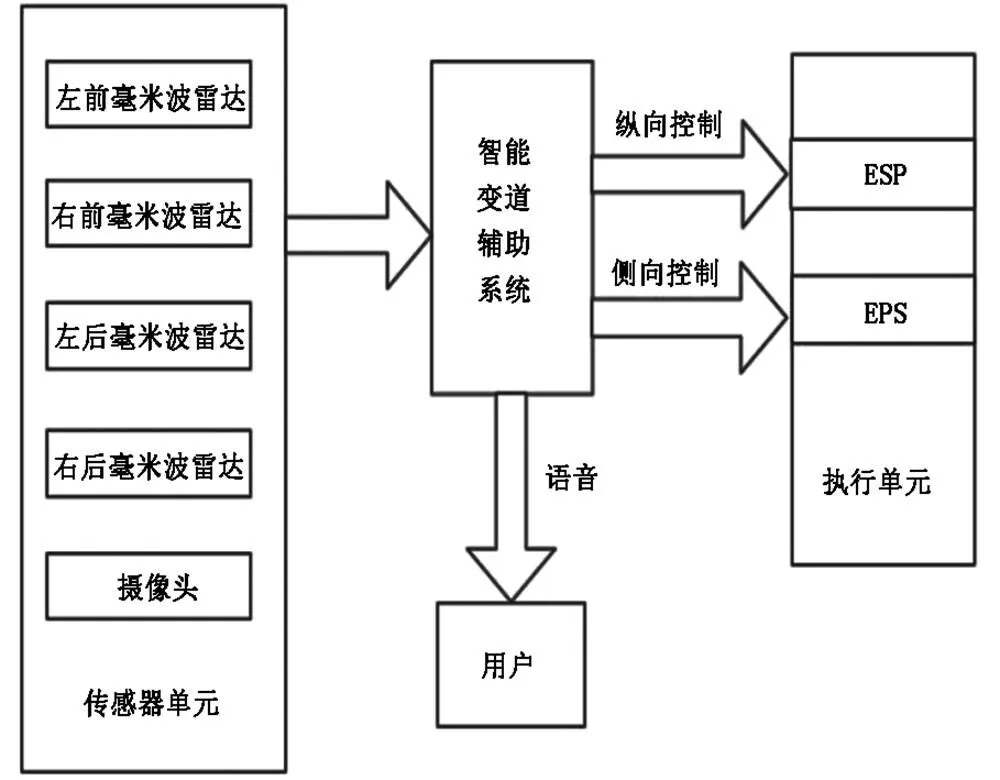
图1 系统总体结构图
1.2 辅助系统功能设计
1.2.1 驾驶员行为感知子系统
该子系统的功能是准确地判断驾驶员的超车意图,为系统是否介入提供判断依据。
1)左、右转向灯开启;
2)车辆偏离预警系统监测到车辆偏离当前车道。
在满足两个条件之一或同时满足两个条件的情况下智能变道辅助系统自动开启并进入工况与车辆状态感知子系统。
1.2.2 工况与车辆状态感知子系统
该子系统的功能是根据当前车辆所处的不同工况和车辆状态,综合判断驾驶员能否安全地完成一次超车或变道行为。
1)双向道路工况。
双车道公路作为一般干线公路是我国公路网中最为主要和普遍的公路形式,具有两条行车道,每条车道用于一个方向的交通,不同路段的中心线有实线、虚线之分。当视觉感知系统判断车辆当前行驶在道路中心线为黄虚线或白线的双向道路时,系统识别为双向道路工况。典型双向道路超车工况如图2所示[2]。

图2 典型的双向车道超车工况
现在以双向道路上的超车行为为例计算安全距离。我国的双车道公路超车视距计算中有关超车与被超车间的车速关系见表1[3]。

表1 超越车与被超车间的车速关系 km/h
由表1可知,车辆在实施超车操作前处于低速跟行状态,实施超车时车速最多高于目标车辆20 km/h,据此可计算加速超车时的超车距离[4]。
(1)加速过程。
在时刻,若满足超车条件,车辆+1行驶至对向车道并加速行驶追上车辆,设加速度为,加速时间为1,加速过程距离1为


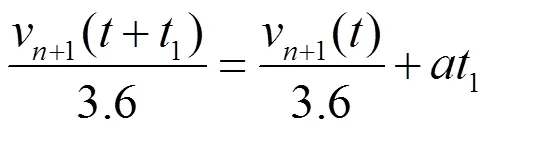
式中,v+1(1)为加速过程末车辆+1的速度,km/h。
(2)匀速过程。
在+1时刻,车辆+1进入匀速行驶阶段并在完成超车后返回原车道,距离2为

式中,2为车辆+1匀速行驶的时间,s。
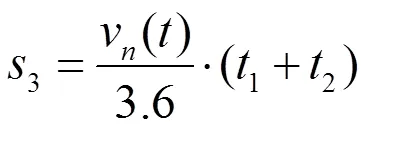
(3)对向来车匀速行驶过程。
在超车过程中车辆+1的对向车辆保持匀速行驶,其行驶距离3为
(4)安全间隔。
超车动作结束后车辆+1与车辆间的剩余距离常取4=50 m。
所以双向车道工况下超车距离的计算公式为
即
判定超车距离时,本车距离与对面来车距离大于才可以判定为符合与前车的距离条件,同样,需同时满足与后车的距离条件。
2)单向道路工况。
当车辆行驶于设有中央隔离带的单向通行道路时,系统切换至单向车道工况。此时系统通过毫米波雷达判断目标区域附近有无障碍物及与障碍物的距离和相对速度,同时通过视觉感知系统判断车辆当前是否行驶在弯道、路口、隧道、黄实线旁等道路法规禁止超车的位置。典型的单向道路工况如图3所示。
单向道路工况的超车安全距离可由双向道路工况推导得[5]

同样,判定超车条件时,本车与前、后车的距离条件同时满足才可判定为满足超车条件。
1.2.3 车辆控制子系统
该子系统的功能是接收工况与车辆状态感知子系统传来的数据信息并向驾驶员做出反馈,包括声光报警系统、加速踏板智能辅助系统和转向盘手力调节系统。控制原理如图4所示。

图4 车辆控制子系统控制原理
1)语音报警系统。
当道路环境与车辆状态感知子系统判定车辆当前不具备超车条件时,语音报警系统发出不同提示音以提醒驾驶员终止超车操作。提示音根据车辆不满足超车条件的情况分为:前方有车、侧向有车、后方有车、速度不足和违法路段等。
2)加速踏板智能辅助系统。
当车辆处于单向道路工况,符合超车条件并进入超车动作实施阶段时,车身侧向的毫米波雷达若探测到车辆侧方有车并行,则启动智能加速踏板辅助系统,增大节气门开度,快速提升车辆速度以减少并行时间,提高行车安全性。加速踏板智能辅助系统在开关两种状态下的速度变化如图5所示。

图5 加速踏板辅助系统对车速的影响
3)转向盘手力调节系统。
当车辆符合超车条件且驾驶员发出转动转向盘的动作时,EPS系统工作产生转向助力,帮助驾驶员更高效地完成转向操作。
当车辆不符合超车条件时,电机反转,在转向盘上施加反向力矩阻止驾驶员的不合理行为,若驾驶员继续转动转向盘,当施加在转向盘上的力矩达到8 N·m时,反向力矩退出,切换至转向助力模式。
2 加速踏板智能辅助系统控制算法设计
当加速踏板智能辅助系统的控制系统工作时,由控制器通过加速踏板进行辅助加速。为了实现更好的鲁棒控制性能,采用滑模变结构控制方法设计控制器,使车辆的行驶速度高于毫米波雷达测得的另一车道的目标车辆速度15 km/h,从而达到辅助驾驶的目的[6]。
将智能变道辅助系统输出的状态向量d设为车辆的目标车速d,将车辆实际输出的状态向量定义为实际车速,将车辆的实际输出状态与智能变道辅助系统的目标状态d之间的误差称为系统误差1。

为使车辆的实际输出状态跟随期望状态,使系统误差1为0,则将系统误差视为滑模变结构控制的滑模面,即
对式(8)求导,并结合式(7)可得

式中,
为使系统能快速滑向滑模面1,设计滑模控制器的趋近速率为指数趋近律,即

式中,1、1均为对角增益矩阵,且对角数值均大于0。
结合滑模控制器的趋近律,式(9)可表示为

最后,对式(11)进行变换,得到滑模控制器的控制输入变量的表达式为
至此,智能变道辅助系统控制器设计完成,控制器的输入为系统的期望输出状态d以及车辆系统的反馈状态,输出为加速踏板。
3 硬件在环仿真分析
3.1 硬件在环台架设计
硬件在环台架结构如图6所示。在台架最底端以ABS(Antilock Brake System,制动防抱死系统)/ESP(Electronic Stability Program,车身电子稳定系统)液压单元为核心构建液压制动系统,ABS/ESP液压单元主油路连接到真空助力器出油口,真空助力器上安装配套的制动踏板,整体固定在台架上,真空助力器的真空度由真空泵提供。使用者坐在座椅上,踩下踏板即可实现制动。
ABS/ESP液压单元支油路分别连接至左前轮制动卡钳、右前轮制动卡钳、左后轮制动卡钳、右后轮制动卡钳,每个支油路上安装一个压力传感器,可以实时采样轮缸压力。每个制动卡钳内安装制动片,当踩下制动踏板时,制动片会夹住制动盘,轮缸压力升高。
主动转向系统以EPS转向管柱为核心,固定在机架上,管柱上端安装配套的转向盘,下端与负载电机连接,使用者转动转向盘时,带动管柱转动,负载电机施加模拟负载,阻止转向盘转动。集成在管柱上的转矩传感器可以反馈当前转矩信号,安装在管柱上的贯通式编码器可以反馈转向盘转角信号。在助力电机不启动时,使用者必须克服模拟负载转矩才能转动转向盘,助力电机正常工作时,使用者才能正常转动转向盘。
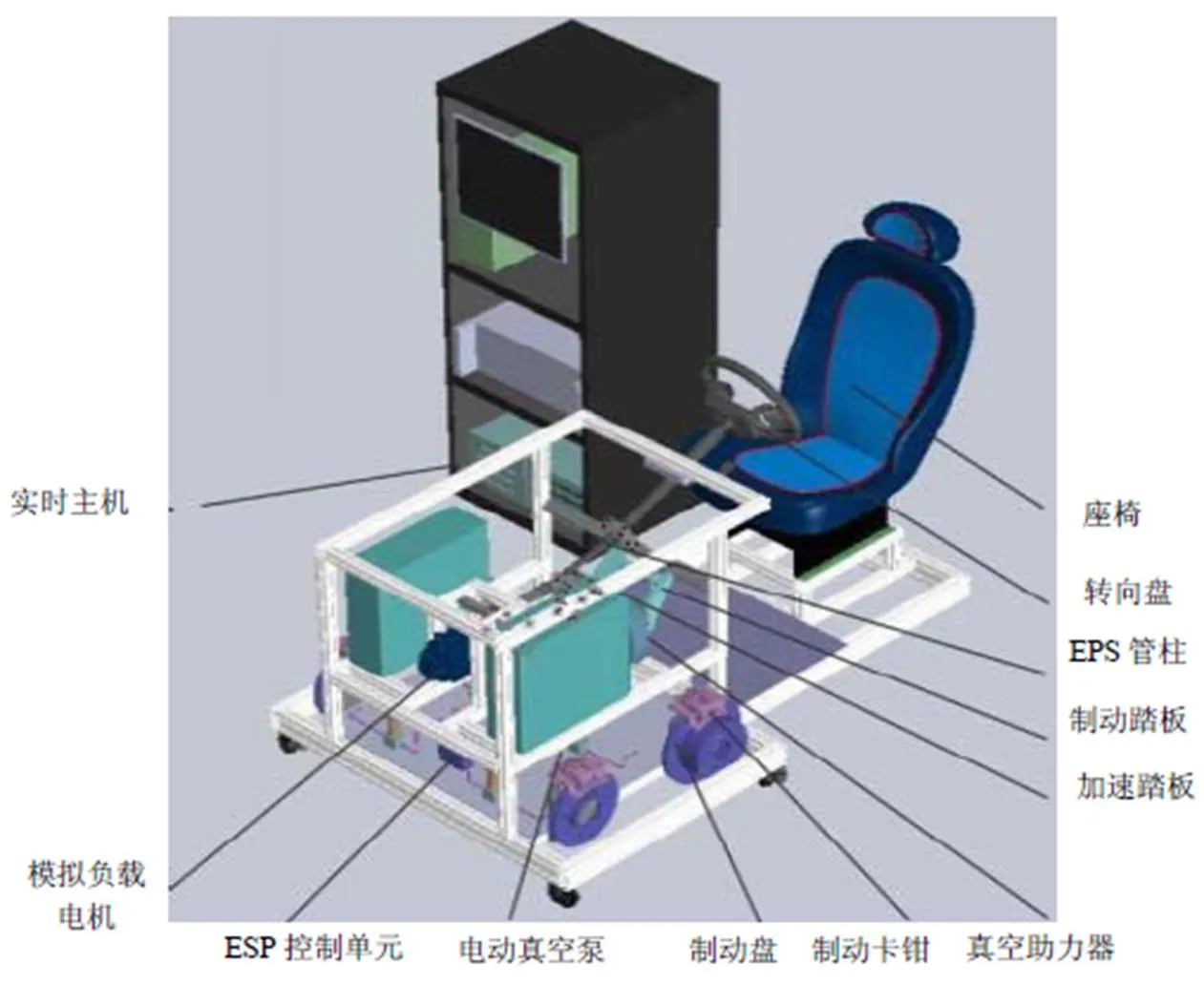
图6 硬件在环台架结构
3.2 仿真分析
为了使加速踏板智能辅助系统的输出更加准确地跟踪期望值,采用滑模变结构控制方法设计控制器,相比较于传统的PID模型控制更加精确、稳定。能够使车辆获得更平顺的加速过程和更理想的输出速度。如图7所示,采用滑模变结构控制的加速踏板智能辅助系统相对于PID模型有更好的稳定性和响应性。如图8所示,采用该系统的车辆较采用PID型的车辆加速更平顺。

图7 滑模控制与PID控制效果比较

图8 不同控制方法对节气门开度的影响
4 小 结
1)通过开发基于纵侧向动力学控制的智能变道辅助系统,实现了提高驾驶员超车变道安全性、减轻驾驶员操作负担的目的,并能够保证车辆拥有足够的动力性和驾驶性能;
2)基于滑模控制的加速踏板辅助控制系统能够使节气门开度变化平稳,解决车辆加速时的车身抖动问题,同时较PID控制具备更优的响应性;
3)通过控制车辆的变道次数和超车时间,系统能够有效缓解交通拥堵压力,提高道路通行能力。
[1]罗禹贡,陈涛,李克强. 智能混合动力电动轿车整车控制系统[J].清华大学学报(自然科学版),2010,50(8):1271-1276.
[2]鱼星媛. 基于车车通信的超车辅助系统研究[D]. 西安:长安大学,2014.
[3]刘世杰. 双车道公路仿真中的超车模型研究[D]. 北京:北京工业大学,2007.
[4]许伦辉,胡三根,伍帅,等. 考虑车辆运行特性的双车道超车模型[J]. 华南理工大学学报(自然科学版),2015,43(4):7-13.
[5]柏伟,李存军. 基于不同限速条件下的超车模型研究[J]. 交通运输系统工程与信息,2013,13(2):63-68.
[6]谭运生. 电动轮汽车转向的动态稳定控制及人车闭环仿真研究[D]. 南京:南京航空航天大学,2015.
2018-04-02
安徽省自然科学基金1508085QE92,合肥工业大学2017年省级大学生创新创业训练计划项目2017CXCYS191。
1002-4581(2018)04-0023-05
U471.1:TP273
A
10.14175/j.issn.1002-4581.2018.04.007