断路器异步动作时的直流配电系统故障特性分析
2018-09-04李海波梅成林裴星宇郭宗宝
张 威,曾 杰,李海波,张 弛,谢 宁,徐 琪, 梅成林,裴星宇,郭宗宝
(1.广东电网有限责任公司电力科学研究院,广东 广州 510080; 2.清华大学能源互联网创新研究院,北京 海淀 100084; 3.广东电网有限责任公司珠海供电局,广东 珠海 519000)
0 引言
电压等级为±20 kV(中压直流配电等级)以下的直流配电系统在较大容量的电力传输、分布式能源接入、提供交流系统的无功补偿等方面显示出明显的优势,成为现阶段直流系统,尤其是柔性直流系统,在城市电网供用电应用方面的重要领域。研究具有安全可靠、经济稳定的直流配电网具有巨大的市场价值和经济价值,未来直流配电系统的前景十分广阔[1-6]。但是现有的直流配电网并没有很多实例,受到直流主设备运行能力的限制,直流配电网的研究也主要针对低压直流电压等级,对于5 kV及以上的直流电压缺少应有的研究、仿真或者试验结果分析[7-9]。目前的研究主要集中在交直流网络[10-12]、关键设备参数研究[13]、经济调度[14]等方面,考虑到日后大容量大电流直流配网的应用,如果需要将中压直流配电系统运用到实际,前期的仿真论证是必不可少的。
直流配电系统可靠性的保障通过运行设备的可靠性实现,而设备运行可靠性又与极端工作情况有很大关系,设备选型过程中必须仿真故障情况下系统暂态特性,特别是短路故障,短路故障电流、过电压和上升率对设备有很高的要求,因此需要分析系统侧配网参数对故障暂态的影响。此外,故障后线路两端及正负极的直流断路器如果发生非同期动作,将对某一侧断路器断口避雷器吸收能量产生较大影响,目前关于该问题的研究较少。本文以目前应用较多的基于模块化多电平结构电压源换流器(modular multilevel converter, MMC)的柔性直流系统为例,建立中压柔性直流输电系统模型,分析快速断路器对切除系统故障的作用,并重点分析直流断路器非同期动作对系统绝缘配合配置的影响。
1 中压直流配电系统模型
1.1 基于MMC的换流站模型
在柔性直流配电网中,为保证高供电质量,都必须基于全控型电压源换流器技术。综合考虑到器件串联技术,及交流谐波、直流谐波、损耗、可靠性等性能表现,一般选取MMC作为电压源换流器。基于MMC的换流站一般划分为交流侧和直流侧两个部分,其接线如图1所示。其中交流侧主要由变压器部分和换流电抗器部分组成;直流侧主要由换流器部分、换流站出口处限流电抗器(或称为平波电抗器)、直流断路器以及线路或负载部分组成,其中换流器的6个桥臂由可控电力电子开关元件和桥臂电抗器构成。

图1 基于MMC结构的中压直流系统换流站拓扑Fig.1 Structure of MMC-MVDC system converter station

图2 MMC换流器功率子模块拓扑Fig.2 Structure of MMC converter power sub module
MMC换流器拓扑如图2所示,功率子模块主要包括半桥、全桥等类型。其中半桥结构不具备故障清除能力,因此在直流侧需要配备直流断路器;而全桥结构由于具备故障自清除能力,故障情况下不会增加短路电流,因此直流侧不需要配置直流断路器,系统拓展时故障电流不会因MMC数量增加而迅速增加。
1.2 仿真系统及参数设计
本文基于珠海能源互联网示范项目,设计3端±10 kV的中压直流配电网拓扑结构,如图3所示。每个双向换流站均采用模块化多电平换流器技术;交流母线额定电压均为10.5 kV;接入点的交流母线正常连续运行电压的范围均为9.3~10.7 kV;极端连续运行电压的范围均为9~12 kV;正常运行频率的范围均为(50±0.2) Hz;事故情况下频率范围均为(50±0.5) Hz。其中MMC-1的功率子模块为全桥型拓扑;MMC-2和MMC-3的功率子模块为半桥型拓扑。仿真系统参数如表1所示。

图3 中压直流配电系统示范工程方案Fig.3 Scheme of MVDC power distribution system
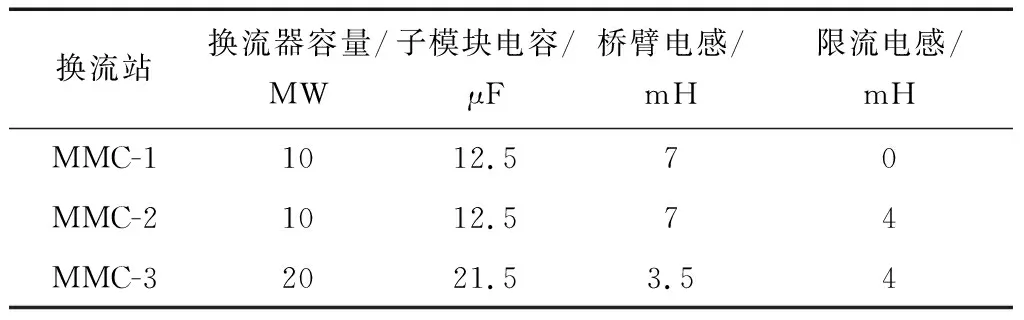
换流站换流器容量/MW子模块电容/μF桥臂电感/mH限流电感/mHMMC-11012.570MMC-21012.574MMC-32021.53.54
1.3 线路参数
直流线路的电压降为
ΔUDC=IDCRLineLLine
(1)
式中:IDC为线路额定电流;RLine为输电线路每公里的直流电阻;LLine为线路长度。
在直流配电系统中,各类换流设备可以适应±10%的输入电压变化,且《中低压直流配电网电压导则》(征求意见稿中)规定:18 kV(含)至±50 kV(含)系统的线路最大允许电压损失不大于10%。以此为根据,假设直流电缆采用水平敷设,导线截面积为240 mm2,输送电流为线路的持续载流量时,可得到±10 kV直流配电系统的输送距离约为25 km[13]。在本文中,电缆1和电缆2的长度设为1.5 km、电缆3的长度设置为5 km,用以研究线路长度对动作同期性的影响。
1.4 系统控制模式
本文的直流配电网部分采用“星型”拓扑结构,为保持系统良好的稳定性,系统级控制为主从控制,推荐其中一端换流器采用定电压控制方式,以保持正常状态下直流母线电压稳定。本文采用的仿真系统3端换流站控制策略为:MMC-3由于其容量较大,设定为电压控制端;MMC-1和MMC-2站为功率控制端;当MMC-3站从系统中退出时,由MMC-2控制系统电压。
2 直流断路器及保护配置
2.1 直流断路器拓扑及工作原理
由于直流系统中没有电流过零点,灭弧困难,目前一般采用交流断路器叠加振荡电路和能量吸收装置的技术方案,实现开断直流电流的功能。但是,交流断路器的操动机构主要为液压机构和弹簧机构,合闸时间一般为60~150 ms,分闸时间为20~60 ms,开断时间长,不能满足快速开断直流故障电流的要求。
本文采用混合式固态直流断路器结构,包括机械开关和电力电子开关两种开关元件,综合机械开关和全固态开关的优点,开关通态损耗小,开断速度快,可靠性高,寿命长。断路器结构如图4所示,包括机械开关支路、固态开关支路和缓冲限压支路3条主要支路。正常情况下,电流通过机械开关。发生短路故障以后,故障识别模块按照设定的动作阈值给直流断路器工作触发信号:首先导通主电力电子开关,再分闸快速真空开关,触头燃弧,待触头开距达到一定距离时,触发耦合负压电路原边回路控制开关,电容器和原边线圈放电谐振,通过副边线圈的耦合,使机械开关支路的电流转移至主电力电子开关,机械开关电流过零熄弧;快速真空开关触头继续分开,待分闸运动到触头间隙能够承受相应的瞬态恢复电压后,主电力电子开关关断,金属氧化物避雷器(metal oxide varistor aristors, MOV)限压支路开始工作,MOV支路电流缓慢下降;当MOV支路电流第1次下降到0时断路器两端隔离刀闸跳开断路器,整个开断过程结束。
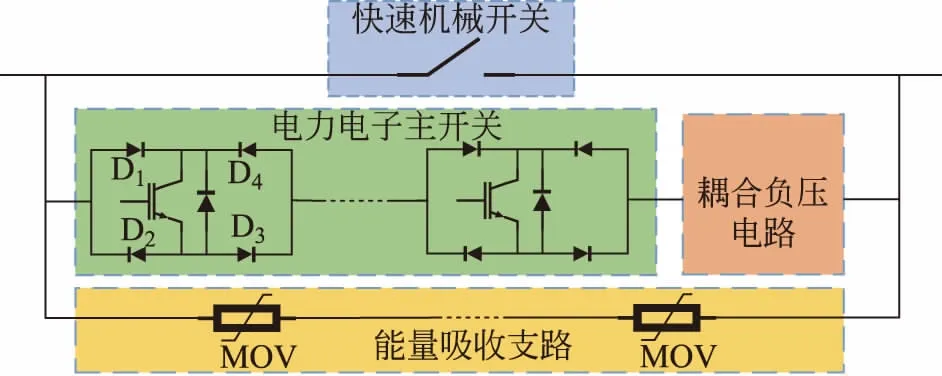
图4 直流断路器拓扑Fig.4 Topology of DC circuit breaker
动态性能的研究需要针对断路器内部3条支路分别进行建模。首先是机械开关支路,对动态过程有主要影响的是机械开关触头间的燃弧过程,然而目前尚无精确的电弧模型,对于动态过程的分析也不要求建立十分精确的电弧内部变化过程,因此对机械开关支路进行电气量等效简化建模。对于真空机械开关而言,电弧电流远小于10 kA时触头间一般产生扩散型真空电弧,其对外表现出正的伏安特性。考虑到10 kV系统实际断路器的电弧电压量级,电弧电压一般为20~60 V。现有的资料和图像表明,电弧电压与电弧电流i(<10 kA)、开距s接近线性关系,与电弧电流(>10 kA)呈现非线性关系。如果将开距s作为时间t的函数,那么电弧电阻可表示为
r=k1f1(i)+k2f2(t)
(2)
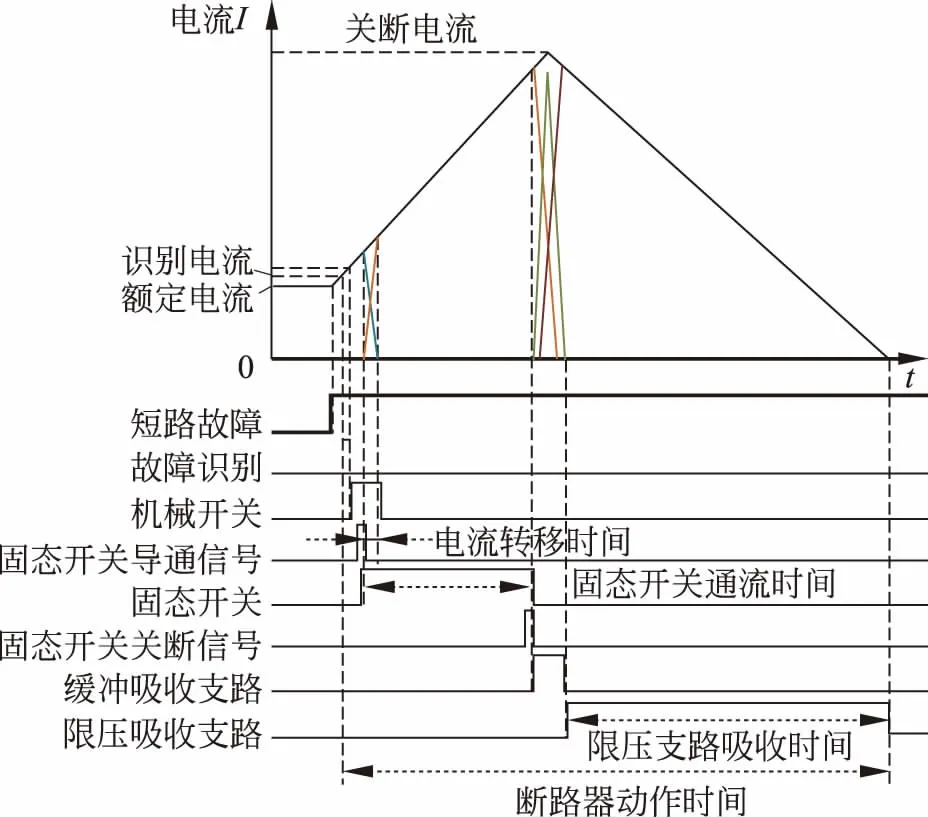
图5 直流断路器动作时序Fig.5 Action sequence of DC circuit breaker
直流断路器的动作时序如图5所示,分为3个阶段。第1阶段按照设定的动作阈值,断路器开始动作,流过断路器的电流不断上升,当满足图4中电力电子主开关的绝缘栅双极型晶体管(insulated gate bipolar transistor, IGBT)导通条件时发生电流转移,因此这部分开断性能和时间取决于机械开关触头间特性和故障电流上升率。第2阶段的开断性能取决于电流转移过程和固态开关的开断特性,时间长度则取决于两个方面:电流转移时间和机械开关触头间绝缘恢复速度。理想情况下电流转移完成且绝缘恢复后才能跳开固态开关支路。如果电流转移过程较快结束,固态开关支路跳开时刻一般以机械开关触头间绝缘强度恢复为基准,为了降低电弧重燃概率需要留有一定时间裕量,对于±10 kV/1 kA直流系统而言机械开关绝缘恢复速度时间为300~1.5 ms。第3阶段性能取决于缓冲吸收支路,时间取决于MOV支路吸收电流持续时间,不同MOV吸收曲线、不同短路状态或者系统运行状态下MOV支路吸收时间不同。
2.2 断路器避雷器特性
断路器内部的避雷器用于限制断路器断口间过电压,并吸收剩余的线路能量,该避雷器需要结合系统能量要求进行串并联设计。当计算串联连接的避雷器最大保护水平时,应采用避雷器最大偏差特性;而决定特定位置的避雷器最大能量要求时,该避雷器应该采用最小的偏差特性,与其相并联的其他避雷器应采用最大的偏差特性,避免分流;也可按照GB/T 311.3—2017《绝缘配合 第3部分:高压直流换流站绝缘配合程序》,在规定避雷器能量时,研究计算避雷器能量值应考虑一个安全系数。这个安全系数的范围为0%~20%,该系数依赖于输入数据和所用模型的容差,以及出现高于研究工况能量的关键故障工况的概率。本文使用的断路器避雷器的特性如图6所示。

图6 断路器避雷器伏安特性曲线Fig.6 V-I characteristic curve of arrester in DCcircuit breaker
2.3 直流线路区保护
根据电力系统保护区域的基本划分原则,直流中压配电系统中被保护对象可分为交流系统、电压源换流器、直流变压器、直流线路、直流母线等几个不同部分。其中,交流系统指与换流器相连的交流系统部分,包括联接变压器、交流线路、联接变压器阀侧至换流器的交流线路等;电压源换流器指连接交流系统与直流系统的电压源换流器;直流变压器指用于与其他电压等级直流系统接入的换流器。
双极故障是直流配电系统最严重的故障类型。直流线路或直流母线发生正负极短接时,电压源换流器的直流电容将通过短路点快速放电,直流电压立即降到0,此时交流系统类似于发生三相短路,严重危害整个系统的安全运行。
故障发生后,换流器自身检测到故障后会迅速闭锁换流阀以保护其内部设备。而系统级保护系统会通过直流低电压过电流保护配合直流线路差动保护的判断,将动作信号送给主控系统,由其完成系统恢复及运行方式的切换。主控系统收到保护系统传来的双极故障判定信号后,进入系统故障隔离和恢复流程,首先将定功率模式的换流器切换到定电压模式以维持系统的直流电压稳定;其次,在收到保护系统传来的故障定位信号后,对故障线路下发直流断路器分指令,以确保故障可靠隔离;最后,在直流断路器动作完成后根据系统恢复后的拓扑结构切换运行方式,恢复直流系统的供电。
2.4 极间金属性短路故障分析
假设在距离MMC-2换流站1.5 km处线路电缆2上发生极间金属性短路故障,柔性直流配电系统的10 kV直流线路为电缆,故障为永久性故障。双极故障后直流电压迅速降低,换流器子模块电容(包括MMC和直流变压器)迅速放电,导致直流电流短时间内快速增大;故障发生后直流线路两端的差动电流在故障发生后400 μs达到直流线路差动保护高定值段,保护系统在延时500 μs后发出保护动作指令,考虑到通讯延时,在故障发生后2 ms,线路电缆2两端的直流断路器收到保护系统的分断指令,开始隔离故障点;与此同时,在故障发生后960 μs,MMC-1站换流器触发本体的桥臂过流保护,马上闭锁触发其全桥功率子模块,截断由MMC-1站向短路点贡献的短路电流;故障发生后2.155 ms时,MMC-2站换流器触发本体的桥臂过流保护并闭锁;故障发生后2.535 ms时,MMC-3站换流器触发本体的桥臂过流保护并闭锁;直流断路器在收到保护系统的分断指令后,于故障发生后4.5 ms断开,完成对故障电流的切除和故障点的隔离;故障发生后60 ms,解锁MMC-1和MMC-3的换流器,系统自行进入自恢复阶段。整个过程如图7所示。换流站的交流侧母线都没有触发过流保护,因此不会断开其交流断路器,实现了直流侧故障的穿越。
3 非同期动作的仿真分析
一般线路首末端及正负极均会配置直流断路器,理想情况下,当线路出线故障时,4个断路器应当同时动作,将故障隔离。现代交流高压断路器中分闸同期性一般控制在3 ms内。直流断路器可能由于保护延时、操作机构动作的非同时性等原因,其安装在线路两端的各个断路器动作时间出现差异。本节将仿真分析断路器动作时间不同对操作过电压和断路器避雷器能量的影响。
本文中,首端断路器为线路靠近换流站的一端,而末端则为靠近开关站的那一端。
3.1 首末端断路器非同期动作
首末端断路器不同期动作时,后动作的一端将开断更大的直流电流,进而在其端间产生更大的动作过电压,需要其端间避雷器吸收更多的能量来抑制该过电压。
本节分析直流断路器非同期动作对避雷器吸收能量的影响。当线路的首端和末端都配置有直流断路器时,为隔离该段线路共应配置4个直流断路器:首正、首负、末正和末负。因此,同期性将存在两个维度,即首末端同期性和正负极同期性。
动作时差定义为首末两端断路器动作时刻的差值。不同动作时差对避雷器能量和端间过电压的影响如图8所示。

图8 首末端断路器动作不同期的影响Fig.8 Influence of asynchronous switching of initating and ending terminal DC circuit breaker
根据图8可看出,当动作时差为正时,随着时差的增加,首端断口释能增加,末端断口释能基本不变;当动作时差为负时,随着时差的增加,末端断口释能增加,首端断口释能基本不变。
3.2 正负极断路器非同期动作
正负极断路器不同期动作,类似于具有多个断口的断路器的非同期动作。先动作的断口(设为正极线直流断路器)将承受额定的极间电压,其断口电压被断路器内部的能量吸收支路抑制在避雷器残压值上,直到另一极断路器动作并成功开断。该不同期动作对能量吸收支路的避雷器容量的影响如图9所示。
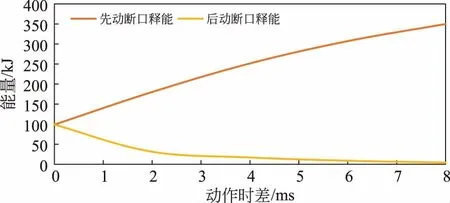
图9 正负极断路器动作不同期的影响Fig.9 Influence of asynchronous switching of positive and negative pole DC circuit breaker
由9图可看出:随着动作时差的增加,先动断口释能增加,后动断口释能减少,如果要求先动直流断路器的泄放能量不超过后动直流断路器泄放能量的3倍,则极间同期性应控制在1.2 ms以内;随着电缆线路长度的增加,断口释能略微增加,基本不变,但先后动作的断路器避雷器能量差逐渐增大,即对同期性要求也越来越高。
4 结论
(1) 当动作时差为正时,随着时差的增加,首端断口释能增加,末端断口释能基本不变;当动作时差为负时,随着时差的增加,末端断口释能增加,首端断口释能基本不变。随着电缆线路长度的增加,断口释能略微增加,基本保持不变。
(2) 随着动作时差的增加,先动断口释能增加,后动断口释能减少。随着电缆线路长度的增加,断口释能略微增加,基本保持不变。