论风力发电机组偏航系统的设计要点
2018-08-31
国电联合动力技术有限公司 北京 100039
1 研究背景
风能是一种取之不尽、用之不竭的绿色环保可再生能源[1-2]。随着全球对可再生能源的不断重视,风力发电在近年来不断取得重大技术突破,总装机容量也不断攀升[3-4]。2016年,全球风力发电新增装机容量超过54.6 GW,我国则以23.4 GW位列第一[5]。风能的高效利用离不开风力发电机组对风资源的准确高效捕捉,偏航系统就是执行这一任务的主要组件。偏航系统是风力发电机组特有的伺服系统,通过偏航驱动的作用,使风轮旋转面与风向保持垂直状态[6],从而保证叶片捕捉到最大扫风面积[7]。
兆瓦级风力发电机组偏航系统主要包括偏航驱动(含偏航电机和偏航减速机)、偏航轴承、偏航刹车盘、偏航卡钳、液压管道、回油管道、润滑系统、偏航编码器、扭缆保护装置、风速仪风向标及偏航控制单元等[8]。偏航卡钳运动阻尼力矩不宜过大,否则偏航时机舱的振动会很大[9];但偏航卡钳运动阻尼力矩也不能过小,否则会给偏航减速机及偏航电机带来较大的压力。这些相关部件之间定量化相关性的研究,是笔者研究的重点,国内外有关该问题的报告较为有限。此外,关于偏航电机电子刹车、偏航卡钳制动力矩、外载的相关性研究及维护工况的剩余制动力矩校核问题也是探讨的要点。对上述问题进行研究,可为大型兆瓦级风力发电机组偏航系统的优化设计提供定量参考。
2 风力发电机组偏航形式分类
2.1 主动偏航形式和被动偏航形式
偏航系统一般分为主动偏航形式[10]和被动偏航形式[11]。主动偏航形式依靠偏航驱动电机作为动力,在偏航控制逻辑的框架下进行主动对风,依靠偏航卡钳及偏航电机电子刹车共同作用,进行机舱整体制动,大型风力发电机组一般多采用主动偏航形式。被动偏航形式依靠风力作为机舱偏航的动力,通过偏航相关机构的配合,完成机组的对风动作,被动偏航形式常用于小型风力发电机组。
2.2 常阻尼式偏航形式和液压阻尼式偏航形式
偏航系统按卡钳的类型又可分为常阻尼式偏航形式和液压阻尼式偏航形式[12]。常阻尼式偏航形式采用全部的偏航卡钳以额定力矩固定在偏航齿圈盘上,在需要偏航动作时,偏航电机输出较大功率的扭矩,以克服偏航卡钳与齿圈盘间的摩擦力矩,实现机舱的定速偏航,待机舱到达指定对风角度时,切断偏航电机电源,恢复制动状态。液压阻尼式偏航形式采用一部分偏航卡钳以额定力矩固定在偏航齿圈盘上,另一部分可由液压单元控制压紧或释放偏航卡钳,需要偏航动作时,液压管路释放一定压力并保压运行,机舱可在偏航电机的驱动力下进行额定转速偏航,不需要偏航时,液压管道加压使偏航卡钳与齿圈盘压紧,从而与偏航电机电子刹车共同实现机组制动效果。
表1为常阻尼式偏航形式和液压阻尼式偏航形式各自的优缺点对比。

表1 常阻尼式偏航形式和液压阻尼式偏航形式优缺点对比
3 偏航系统主要组件相关性
3.1 偏航减速机耐受极限、偏航卡钳运动阻尼力矩和外载相关性
偏航卡钳运动阻尼力矩设置较大,会导致机组在偏航时产生振动及异常响声,同时也会缩短摩擦片的使用寿命。偏航卡钳运动阻尼力矩设置过小,会给偏航减速机及偏航电机带来较大的负载,严重时会在特定外载条件下,使偏航减速机超出设计耐受极限而使减速机断齿,或使偏航电机超载烧毁。
由此可见,研究偏航过程中偏航卡钳运动阻尼力矩、偏航减速机耐受极限、偏航电机转动惯量及驱动力矩截断值外载之间的定量关系意义重大,研究所得相应的定量化规律可以为科学合理的偏航系统选型提供有效参考。
对偏航减速机耐受极限的设计算法进行研究,将风力发电机组机舱转动质量与偏航电机总转动惯量的比值k定义为:

式中:nd为偏航驱动的数量;ib为偏航轴承齿圈齿数与偏航驱动输出小齿齿数的比值;In为机舱在偏航轴承中心处具有的转动惯量;Im为偏航电机的转动惯量;ig为偏航减速机的总传动比。
将定义的惯量比值k进行参数整合迭代,即可得到偏航减速机耐受极限Tmx:

式中:Ls为驱动力矩截断值外载扭矩;Lmx为风电机组极限外载扭矩;f为偏航卡钳运动阻尼力矩与机舱摩擦力矩总和。
我们的中学历史课堂上,经常有这样一道有趣的测试题,将罗斯福、丘吉尔、希特勒三个世界历史上的著名人物对号入座:人物甲喜欢读书,酷爱艺术,保持素食习惯,从不吸烟,偶尔来点啤酒;人物乙笃信巫医和占卜,有两个情妇,有多年的吸烟史,嗜好马提尼酒;人物丙小时候两次被赶出校门,每天睡到中午才肯起床,每天都要喝一瓶白兰地。或许结果有点儿意外,人物甲是法西斯头子希特勒,人物乙是连任三届美国总统的罗斯福,人物丙是担任过两任英国首相的丘吉尔。
因为机舱总质量一定,所以机舱摩擦力矩可视为定值,f可间接认为与偏航卡钳运动阻尼力矩成单调线性关系,则Tmx与Lmx、Ls、f存在定量化规律。
(1)Lmx和Ls均恒为正数,说明增大驱动力矩截断值外载扭矩及增大风力发电机组极限外载扭矩,均会引起偏航减速机耐受极限的增大。
(2)f值在k<1时为负,此时减小偏航卡钳运动阻尼力矩,偏航减速机的耐受极限增大。
(3)f值在k>1时为正,此时减小偏航卡钳运动阻尼力矩,偏航减速机的耐受极限减小。
(4)f值在k=1时为0,此时改变偏航卡钳运动阻尼力矩,不影响偏航减速机的耐受极限。
较好的设计效果是使风力发电机组机舱转动惯量与偏航电机总转动惯量的比值k>1,这样在外载一定的前提下,既可减小偏航卡钳运动阻尼力矩,又可减小偏航减速机的耐受极限,进而达到较好的经济性和可靠性。而使比值k>1可行的办法是尽可能减小偏航电机的转动惯量,因为风力发电机组机舱的转动惯量很难有较大的调整空间。
偏航减速机耐受极限Tmx、偏航卡钳运动阻尼力矩与机舱摩擦力矩总和f、驱动力矩截断值外载扭矩Ls的双线性数量关系可以用如图1所示的三维示意图进行解释。
3.2 偏航电机电子刹车制动力矩与偏航卡钳制动力矩的相关性
偏航电机电子刹车制动力矩与偏航卡钳制动力矩共同承担风力发电机组在静止状态下的制动任务。偏航卡钳制动力矩可以按照相关标准进行设计,但偏航电机电子刹车制动力矩的设计则没有约定俗成的标准,因此,在选取偏航电机电子刹车制动力矩时应考虑如下要点。
偏航电机电子刹车设计时需要考虑外载的情况,如果要求偏航电机电子刹车制动力矩与偏航卡钳制动力矩总和可抵御极限外载,那么偏航电机电子刹车就需要提供足够大的制动力。而极限外载又是50年一遇的偶发阵风,为参考值,以这样的小概率风载发生时都需要机舱保持制动,未免是过于保守的设计。实际上,可以在图2所示时间序列的载荷谱上,选取一个制动力矩截断值外载,即图中虚线处作为总制动力矩可以抵御的风载进行选型,这样的设计更为合理。风力发电机组若遭遇大于制动力矩截断值外载时,则允许其出现短暂的异常偏航,如出现打滑现象,但持续的时间不应超过制动力矩截断值载荷所对应的时间间隔。
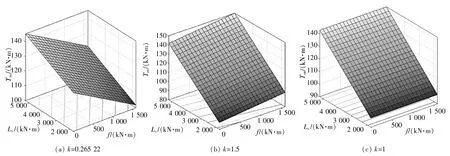
▲图1 偏航减速机耐受极限双线性参数影响关系

▲图2 偏航系统载荷时间序列
4 偏航系统子部件常见故障
4.1 偏航电机故障时偏航卡钳制动力矩余量问题
偏航系统制动作用不仅要体现在风力发电机组正常制动工况,还要为更换故障部件工况提供制动作用,因此,先考虑在偏航电机出现故障时,偏航卡钳提供的制动力矩余量问题。
以1.5 MW及2 MW风力发电机组为例,此类风力发电机组大多使用4台偏航电机,在设计选型之初,可以假设一台偏航电机出现故障而导致其偏航电机电子刹车的制动能力丧失。在更换该故障部件时,其余三台偏航电机电子刹车制动力矩转换为偏航轴承处的总制动力矩值与偏航卡钳制动力矩值总和,需要大于维护工况的最大外载,否则维护更换该故障偏航电机时,很可能出现机舱不能完全制动而造成其它部件次生损坏。
4.2 偏航卡钳故障时偏航电机制动力矩余量问题
偏航卡钳由于使用较多的液压油路,故障点较多,存在液压站泄漏、刹车盘材料磨损、偏航卡钳位置偏离等诸多问题。目前,大兆瓦风力发电机组中使用的偏航卡钳及液压系统多采用单油路设计,若出现的故障是液压油路泄漏,则在一定时间后,偏航卡钳会失去全部制动力矩。这样的故障发生后,在机舱的维护工况下,抵御维护工况外载的任务全部由偏航电机电子刹车来执行。可见偏航电机电子刹车总制动力矩在设计时,需要考虑卡钳单油路故障发生后偏航电机电子刹车总制动力矩大于维护工况最大外载。
4.3 偏航减速机输出小齿轮与偏航轴承齿圈强度问题
偏航减速机输出小齿轮的洛氏硬度(HRC)要求为58~62,热处理多为渗碳淬火。而偏航轴承内齿圈的洛氏硬度(HRC)要求为50~60,热处理多为感应淬火。部件的体积大小影响到了热处理工艺,不同的热处理工艺外加实际的制造偏差,往往使偏航轴承的齿圈硬度小于偏航减速机输出小齿轮的硬度,从而导致偏航轴承齿圈容易先磨损。另一方面,偏航减速机输出小齿轮旋转圈数比偏航轴承齿圈多数倍,且偏航减速机输出小齿轮的单位齿面的磨损率又相对较大。上述两点此消彼长,使目前的偏航减速机输出小齿轮和偏航轴承齿圈的配合关系无法找到很好的整体设计平衡点。
就实际更换的难易程度而言,偏航轴承更换很困难,在更换时需要将机舱整体吊装到地面后才能重新更换新的偏航轴承;而偏航驱动更换不需要吊装机舱,仅需将偏航驱动分解后用机舱内的小吊车吊装更换即可。由此可见,在基本等强度设计的大原则下,偏航减速机输出小齿轮的安全余量建议略小于偏航轴承齿圈,这样可降低整机的维护成本。
5 结论
笔者以大型风力发电机组偏航系统作为探讨对象,分别从偏航系统的分类形式、偏航减速机与偏航卡钳的相关性、偏航电机与偏航卡钳的相关性、偏航驱动与偏航轴承的相关性进行研究,主要结论如下。
(1)增大驱动力矩截断值外载及增大机组极限外载均会引起偏航减速机耐受极限的增大。为了实现既能减小偏航卡钳运动阻尼力矩,又能减小偏航减速机耐受极限的目的,需要将风力发电机组机舱转动惯量与偏航电机总转动惯量的比值k控制为大于1。鉴于机舱转动惯量不宜调整的事实,建议在今后偏航电机设计时使其转动惯量尽可能减小,从而保证上述k值尽可能大于1。
(2)偏航电机电子刹车制动力矩及偏航卡钳制动力矩设计时需要考虑制动力矩截断值外载,在兼顾经济性和安全性的前提下,可以允许在经历大于制动力矩截断值外载后,机组出现短时间的打滑,但持续时间不能太长。
(3)对故障工况的维护外载进行校核,以此来保证制动部件一方出现故障时,剩余制动力矩需满足抵抗维护工况下的最大外载,从而保证维护更换故障部件时机舱能处于制动状态。