CORS系统虚拟观测应用
2018-08-30周晓卫胡明匡志威刘鹏程
周晓卫,胡明,匡志威,刘鹏程
(长沙市规划勘测设计研究院,湖南 长沙 410007)
1 引 言
GPS全球定位系统具有精度高、全天候以及不受测点通视条件限制的特点,已广泛应用于工程测量、大地测量、航空航天测量、遥感等各个测量领域[1]。特别是在控制测量工作中,GPS几乎完全取代了常规测量方法[2]。
实际应用表明,GPS控制测量精度主要受三方面因素的影响:基线的测量精度、控制网的几何图形强度和地面起算点的精度[3~7]。基线测量精度的提高,可以通过延长观测时间获得;网的几何图形的增强,可通过增加控制点个数及优化控制网网型获得。而延长观测时间或增加控制点个数,势必增加测量成本,影响经济效益。
当地面起算点坐标含有粗差或精度较低时,不仅会使单位权方差估值不准确,而且还会使GPS观测得到的高精度成果受到歪曲。起算点坐标的误差对待定点的影响是系统性的[8],起算点误差越大,待定点误差也越大,同时带有误差的起算点个数及分布不同对GPS网点的平差坐标影响也不同。因此,提高起算点的精度和准确度,对控制测量工作至关重要。
随着GPS技术的发展,很多省份或地区都布设了CORS系统,实现了高精度、实时的数据传输及应用。而通过CORS基站的精确坐标、长时间观测的原始数据以及空间相关误差理论[8],推估生成网内任意虚拟测站,作为工程控制网的起算点或者结点,不仅提高了起算点的可靠性,优化了控制网的网型,而且也减少了观测成本,提高了工作效率和经济效益。
本文针对CORS系统虚拟测站观测数据的生成原理,结合工程实例,详细分析了该方法的测量精度和可靠性,对相关工作起到参考作用。
2 虚拟测站观测数据的生成原理及实现
2.1 虚拟测站观测数据的生成原理
GPS虚拟测站观测数据的生成是GPS定位的逆过程[9]。在生成GPS虚拟测站观测值时,首先利用CORS基站的原始观测数据,计算任意历元GPS卫星的三维位置、对流层延迟及电离层延迟等模型误差;再根据虚拟测站的三维坐标和设定的卫星截止高度角计算该虚拟测站可观测到的GPS卫星,并计算出虚拟测站和可视卫星之间的距离,获取GPS模拟观测值的真值;然后根据虚拟测站的位置以及参考站网络的空间误差线性内插得到空间相关误差;并在距离真值上添加空间相关误差、观测噪声、粗差及周跳等。最后根据观测时间、采样率等辅助信息把模拟得到的GPS观测值以指定的数据格式输出,其基本流程如图1所示。
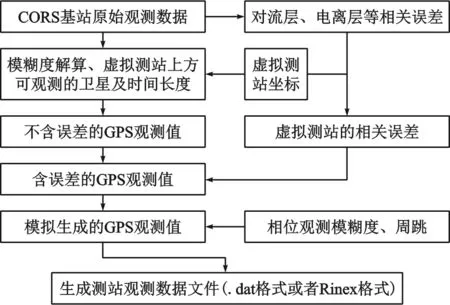
图1 虚拟观测数据生成流程
2.2 虚拟观测数据的生成
长株潭连续运营参考站系统(CZTCORS),采用Trimble公司的Trimble Pivot Platform(TPP)作为系统运营管理软件。TPP软件包含多个模块,其中DataShop模块可以根据指定的虚拟测站坐标,生成虚拟观测值。具体实现如下,在TPP软件中选择DataShop列表,在弹出的选择框中输入虚拟测站点的WGS84空间直角坐标,拟生成观测数据的采样间隔,起始时间和时间长度,输出的数据格式等信息,即可快速生成指定点的GPS双频观测数据,如图2所示。
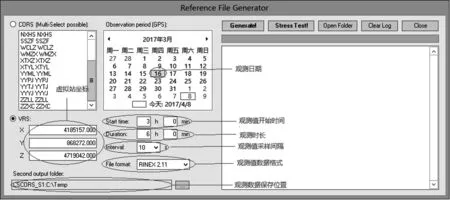
图2虚拟测站观测数据的生成
3 实验分析
为验证CORS系统生成的虚拟测站静态观测数据应用于GPS网平差方法的可靠性和可行性,利用长沙市地铁6号线的平面控制测量观测数据进行验证。该项目按照技术设计要求,根据地铁线路走向,共布设C级精度的控制点43个,利用周边已有高等级控制点6点。布设控制网如图3所示。利用Trimble Business Center 2.60进行基线解算,并利用科傻GPS数据处理系统进行网平差,并以此结果作为参考值进行方案论证。

图3 地铁线路平面控制网示意图
在原有的平面控制网四周,利用CZTCORS系统生成了10个虚拟测站(VR01至VR10)的观测数据,如图4所示。并按照以下方案进行了比较分析。
方案一:利用测区周边的6个已知点,求解全网的未知点坐标,并以求解的未知点坐标作为参考值。
方案二:利用测区周边的6个已知点,求解虚拟测站的坐标,并与虚拟测站的真值进行比较,如表1所示。
方案三:利用测区周边的10个虚拟测站作为已知点,将测区周边的6个已知点作为未知点,求解6个已知点的坐标,并将求得的已知点坐标与原值进行比较,如表2所示。
方案四:利用测区周边的6个已知点和10个虚拟测站点共同作为已知点,求解全网的未知点坐标,并与方案一进行比较,如表3所示;
方案五:利用测区周边的10个虚拟测站点作为已知点,求解全网的未知点坐标,并与方案一进行比较,如表3所示;
方案六:利用测区周边的部分已知点(A,C,D三点)和10个虚拟测站点,如图5所示,求解全网的未知点坐标,并与方案一进行比较,如表3所示。
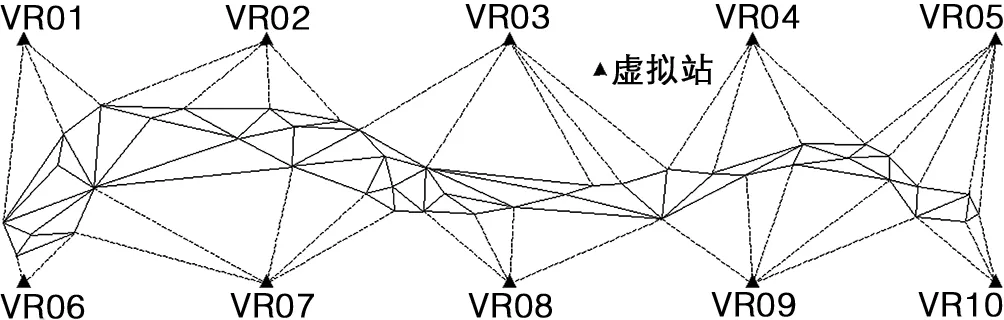
图4 增加虚拟测站的平面控制网示意图

图5 虚拟测站和含有部分已知点的平面控制网示意图

虚拟站点位坐标真值与计算值的差值统计表 表1

控制网中未知点点位坐标差值对比统计表 表3
方案四至方案六解算的未知点平差结果精度统计如表4所示。
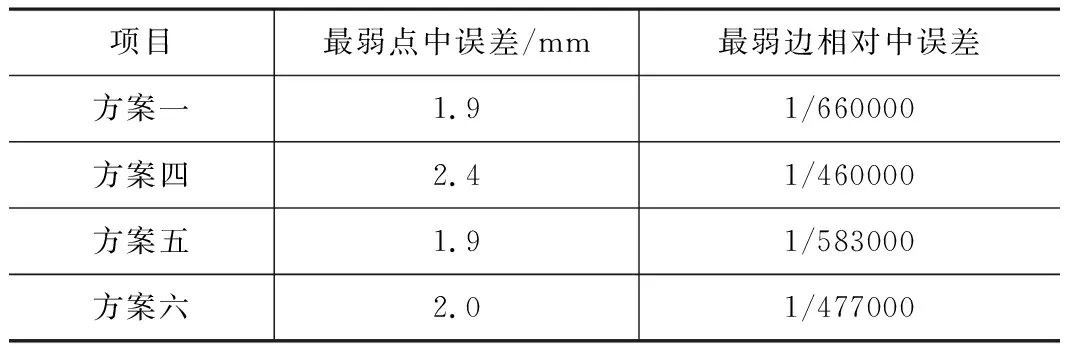
平差结果精度统计表 表4
如表1和表2所示,利用CORS系统生成的虚拟站的观测数据,与测区周边已知点的观测数据联合平差,方案二和方案三的平差结果一致。即可以用虚拟测站替代已有控制点,参与控制网平差。
如表4所示,四种方案的最弱点中误差精度都达到mm级,最弱边相对中误差也小于规范[10]规定的十万分之一的要求;方案四、五、六求得的未知点坐标值与方案一求得的坐标值的较差都很小,坐标差值的均方根误差小于 10 mm,坐标差值最大值为 13.5 mm,小于规范[10]规定的‘重合点坐标较差≤25mm’的要求;方案六,即组合测区内部分已知点和虚拟点,共同作为已知点参与网平差,其结果与方案一更接近。
对比图3、图4和图5可知,利用虚拟测站作为已知点进行GPS网平差,已知点分布更加均匀,网型更加优化。
4 结 论
对于工程测量中的中小型GPS控制网,可以通过CORS站生成虚拟测站作为起算点,其平差精度与传统方法一致,精度可达mm级;而利用虚拟测站可以不需要在已知点上架设GPS,并且不受已知点位置和精度的限制,可以尽可能地增强控制网几何图形强度,同时减少外业工作量,提高工作效率。而CORS系统生成的虚拟测站与测区的距离对控制网精度的影响大小,以及CORS系统覆盖区域内和区域外生成的虚拟测站对控制网精度的影响大小,尚须作进一步的研究。