主动侧杆引导下的Ⅱ型驾驶员诱发振荡抑制
2018-08-29许舒婷谭文倩孙立国屈香菊
许舒婷,谭文倩,孙立国,屈香菊
北京航空航天大学 航空科学与工程学院,北京 100083
为了提高飞机的飞行性能,现代飞机广泛采用了放宽静稳定性的构型设计,并使用侧杆实施操纵。侧杆较中央杆操纵更灵敏,更容易造成控制面指令输入过快,使舵机速率发生饱和,从而引起驾驶员诱发振荡(PIO)。由舵机速率饱和引起的人机闭环振荡属于Ⅱ型PIO。Ⅱ型PIO严重威胁飞行安全[1-2],研究Ⅱ型PIO抑制技术,对于改善人机闭环系统特性,提高飞行安全性有重要实际意义[3-4]。
目前,科学家们主要通过控制器的设计来降低Ⅱ型PIO发生的可能性。包括被动式控制器设计,即在飞控系统中设置补偿器[5-11];以及主动式控制器设计,即通过控制面分配技术[12-15]来抑制速率饱和引起的Ⅱ型PIO。但这类“修复性”的方法都是假定控制系统各元素按照设计者意愿工作,没有考虑人机交互问题的影响。驾驶员相比于控制器来说自适应性更强,改变驾驶员操纵是解决Ⅱ型PIO问题的根本。
驾驶员主要通过人机交互界面获取飞行状态变化信息,对飞机实施控制。友好的人机界面设计能够改善人机耦合特性,使闭环系统发挥更大效能。在飞机人机交互界面设计方面,Klyde和McRuer[16]提出了一个Smart-Cue智能提示操纵杆系统。通过自适应实际控制系统与理想标称系统之间的系统误差,将其反馈到人感系统,给驾驶员提供触觉感知,从而引导驾驶员实施控制。实验结果表明,在仅有Smart-Cue的情况下,较小的提示力驾驶员不易察觉[17];即使力提示很大,Smart-Cue也不是那么有效[18]。当与Smart-Gain指令路径增益系统结合应用时,能对舵面速率限制起到减缓的作用[19]。这种Smart-Cue与Smart-Gain技术有利于电传操纵系统中主动侧杆技术的发展[20]。
尽管利用操纵杆系统研究Ⅱ型PIO抑制问题已有一些实例,但该方法仍处于起步阶段。主动侧杆的重要特征是人感系统特性随飞机运动反馈而变化,并将这种变化通过人感系统传递给驾驶员,给驾驶员一种触觉感示,以加强驾驶员的“情景意识”。本文根据舵偏角系统误差δerr改变主动侧杆人感系统特性,将Smart-Cue与Smart-Gain的特性集成起来,有效避免驾驶员过快的操纵指令,从而抑制Ⅱ型PIO的发生。研究内容具体包括:① 建立主动侧杆控制的人机系统结构模型,包括主动侧杆人感系统模型、驾驶员模型以及飞机与飞控系统模型;② 通过飞行品质评价、速率饱和情况及控制误差大小分析主动侧杆对Ⅱ型PIO的抑制作用,不同人感系统特性对Ⅱ型PIO的影响,以及在不同被控对象情况下主动侧杆的抑制效果。
1 人机闭环系统模型
人机系统结构如图1所示,它由驾驶员、人机界面以及带控制器的飞机系统组成。通过驾驶员、人机界面和飞行控制系统相互作用和协调来共同完成飞行任务[21]。
人机界面通过视觉、触觉、听觉等形式将实际状态信息感知给驾驶员,并且将驾驶员提供的控制指令传输给飞机。在出现不良人机耦合的情况下,利用触觉感受提示驾驶员是最直接的手段,这种感受提示可以通过主动侧杆得以实现,主动侧杆可以将飞机运动状态信息的变化反馈到人感系统中,从而有效提示驾驶员。
基于驾驶员控制模型建立人机闭环系统,驾驶员模型有多种形式[22]。对于本文所研究的问题,需要体现驾驶员对人感系统的感知,就是人感系统对驾驶员的影响。基于此,本文选用Hess的结构驾驶员模型[23],人机系统闭环模型如图2所示。
图2中,θc为俯仰角指令信号,θ为实际的俯仰角输出,UM为驾驶员的本体反馈信号,Fs为侧杆杆力输入,δs为侧杆杆位移输出,EM代表驾驶员延迟后的误差输入。转角频率ωc由所执行的任务决定,这里选定一个固定的转角频率2.0 rad/s[24]。驾驶员增益Ye的作用是根据任务要求,保证开环穿越频率;时间延迟τ0反映了驾驶员的操纵延迟,一般取τ0=0.2 s。


图1 人机系统结构框图Fig.1 Block diagram for pilot-aircraft system

图2 人机闭环系统Fig.2 Pilot-aircraft closed-loop system
YFS代表主动侧杆的人感系统环节。针对Ⅱ型PIO问题,本文利用主动侧杆的特点——能够随着飞行状态的不同实时改变人感系统的特性,给驾驶员以提示,提高驾驶员的情景意识。
神经肌肉系统YNM可以用于帮助设计和分析操纵杆。在主动侧杆引导的人机系统中,当主动侧杆动态特性发生变化时,驾驶员在操纵侧杆时会改变他的神经肌肉系统的动态特性。
下面将详细研究主动侧杆人感系统模型YFS以及人感系统的改变引起的驾驶员神经肌肉系统YNM的变化。
2 主动侧杆人感系统模型
在侧杆操纵的人机系统中,驾驶杆位移输出作为飞机运动的引导输入,飞机受控运动的反作用力不再反馈给驾驶员,使驾驶员“感觉匮乏”,从而影响驾驶员实施有效的控制。侧杆引导的方式如图3所示。
主动侧杆在每个运动轴上都有伺服舵机,通过与飞机飞行状态信息相关的电信号控制人感系统特性,驾驶员从手部的杆力变化上就能感到飞机对指令的响应情况,从而提示驾驶员进行操纵。
由于主动侧杆的人感系统特性是变化的,这种变化依赖于飞机的运动状态信息,所以需要通过飞机的运动对人感系统进行调参。对于Ⅱ型PIO舵机速率饱和问题,可以通过Smart-Cue智能提示系统舵偏角误差δerr调整人感系统结构参数,从而抑制Ⅱ型PIO。


图3 侧杆控制回路Fig.3 Control loop with a side-stick
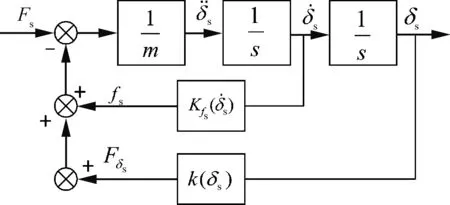
图4 人感系统控制回路[26]Fig.4 Feel system control loop[26]

(1)
(2)

经过拉式变换可以得到
(3)
由于在侧杆的操纵下,杆力较轻,操纵敏感,容易引起过快的操纵,引发人机闭环失稳。这时需要通过人感系统给驾驶员一种触觉感示,使较大的杆力情况下得到较小的杆位移,让驾驶员难以操纵驾驶杆。本文希望通过提高驾驶杆内等效弹簧的刚度,即弹性系数来避免出现速率饱和。


图5 k与舵偏角速率的关系Fig.5 Relationship betweenkand actuator rate
的选取需要适当,如果k增加的较小,会达不到抑制Ⅱ型PIO的效果;k增加的过大时,驾驶员无法推动驾驶杆,虽然可以抑制PIO,但却以牺牲执行任务为代价。所以需要通过主动侧杆对弹性系数进行调参,即找到合适的k。
3 神经肌肉系统
在Hess结构驾驶员模型中,神经肌肉系统是一个确定的二阶系统模型,然而主动侧杆人感系统的变化会引起驾驶员神经肌肉系统的变化。主动侧杆弹簧刚度增大时,驾驶员会施加更大的力,从而影响驾驶员神经肌肉系统参数的变化。因此本节通过研究主动侧杆对驾驶员神经肌肉系统的影响,确定神经肌肉系统的参数。神经肌肉系统的结构组成如图6所示,主要包括肌肉系统和神经系统。其中,up为驾驶员输入,xt为驾驶员控制行为输出,qm为神经系统输出,ms为肌肉系统输出,xl为肌肉系统对神经系统的反馈信号。
3.1 肌肉系统组成及参数
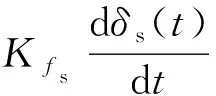
肌肉系统主要模拟神经肌肉系统的物理部分,产生力或传递力,肌肉系统的参数由弹性皮肤模型(阻尼Bc、刚度Kc)、手臂转动惯量Il、平行弹性部分(PEC)(刚度Kpec)、串联弹性部分(SEC)(刚度Ke)以及收缩部分(CC)(阻尼Bm、刚度Km)组成。肌肉系统部分框图结构如图7所示。

图6 驾驶员与神经肌肉系统的组成部分Fig.6 Pilot and components of his neuromuscular system
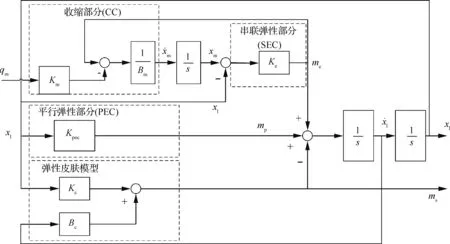
图7 肌肉系统部分结构框图Fig.7 Block diagram for muscular system
主动侧杆人感系统的变化主要影响肌肉系统参数Bm、Bc。随着杆力矩的变化,Bm、Bc会相应地变化。其他参数变化较小,相对变化基本可以忽略。其他肌肉系统部分基本恒定的数据见表1。基于文献[27],实验得到Bm、Bc与ms的关系如图8所示。当达到速率饱和时,主动侧杆弹簧刚度都变大,此时驾驶员会施加更大的力。根据拟合曲线得到Bm与Bc随杆力矩变化的情况(见图9),可知不同杆力矩下Bm与Bc的值。

表1 肌肉系统参数值Table 1 Parameter values of muscular system

图8 Bm、Bc与ms的关系Fig.8 Relationship between Bm, Bc and ms

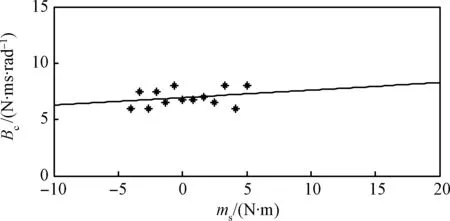
图9 Bm与Bc随杆力矩变化的曲线Fig.9 Curves of Bm, Bcwith change of moment on side-stick
3.2 神经系统组成及参数
神经系统部分是一种内部形式,能够给模型产生快速的“冲击式”运动。神经系统部分结构如图10所示。
主动侧杆人感系统的变化主要影响神经系统参数Kn。当侧杆刚度变化时,软件系统部分Kn参数值有所变化,根据文献[28]的实验结果,Kn随杆力Fs的变化如图11所示,+10°和-10°代表实验的测试输入斜坡速度。这里Kn取不同输入下的平均值。因此,当达到速率饱和时,主动侧杆弹簧刚度变大,杆力增大,根据拟合曲线Kn随杆力变化(见图12),可知不同杆力下Kn的值。其他神经系统部分基本恒定的数据见表2。其中,τfL、τfl、Kf为神经系统内部模型参数,τnL、τnl、Δtn为神经系统神经反馈参数。

图10 神经系统部分结构框图Fig.10 Block diagram of nervous system

图11 Kn与杆力的关系[28]Fig.11 Relationship between Kn and force on side-stick[28]
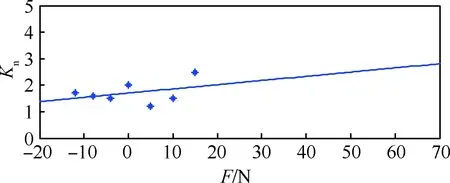
图12 Kn随杆力的变化曲线Fig.12 Curve of Kn with change of force on side-stick
表2 神经系统参数值Table 2 Parameter values of nervous system

变量τnL/sτnl/sΔtn/sKf/rad-1τfL/sτfl/s数值00.490.041.54600.3
4 人机闭环仿真及飞行品质评估
根据上述描述,得到主动侧杆控制的人机系统模型如图13所示。其中,E代表驾驶员输入误差信号,R代表驾驶员增益后的误差输入。

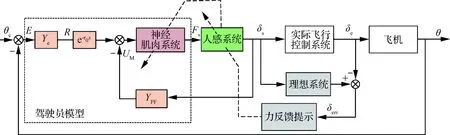
图13 主动侧杆控制的人机系统模型Fig.13 Pilot-aircraft system model with active side-stick control
Αp=

Dp=[0]
(4)
式中:Αp代表飞机系数矩阵;Bp代表飞机控制矩阵;Cp代表飞机输出矩阵;Dp代表直接传递矩阵。


表3 飞行控制系统参数Table 3 Parameters of flight control system

表4 人感系统参数值[29]Table 4 Parameter values of feel system[29]
4.1 时域仿真结果
为了探究主动侧杆对速率饱和抑制及对人机闭环系统操纵品质的影响,对NT-33A飞机采用MIL-HDBK-1797A[30]中一个典型的离散变化的俯仰跟踪任务进行仿真。为了能大幅度触发速率饱和,设定速率饱和为20(°)/s。
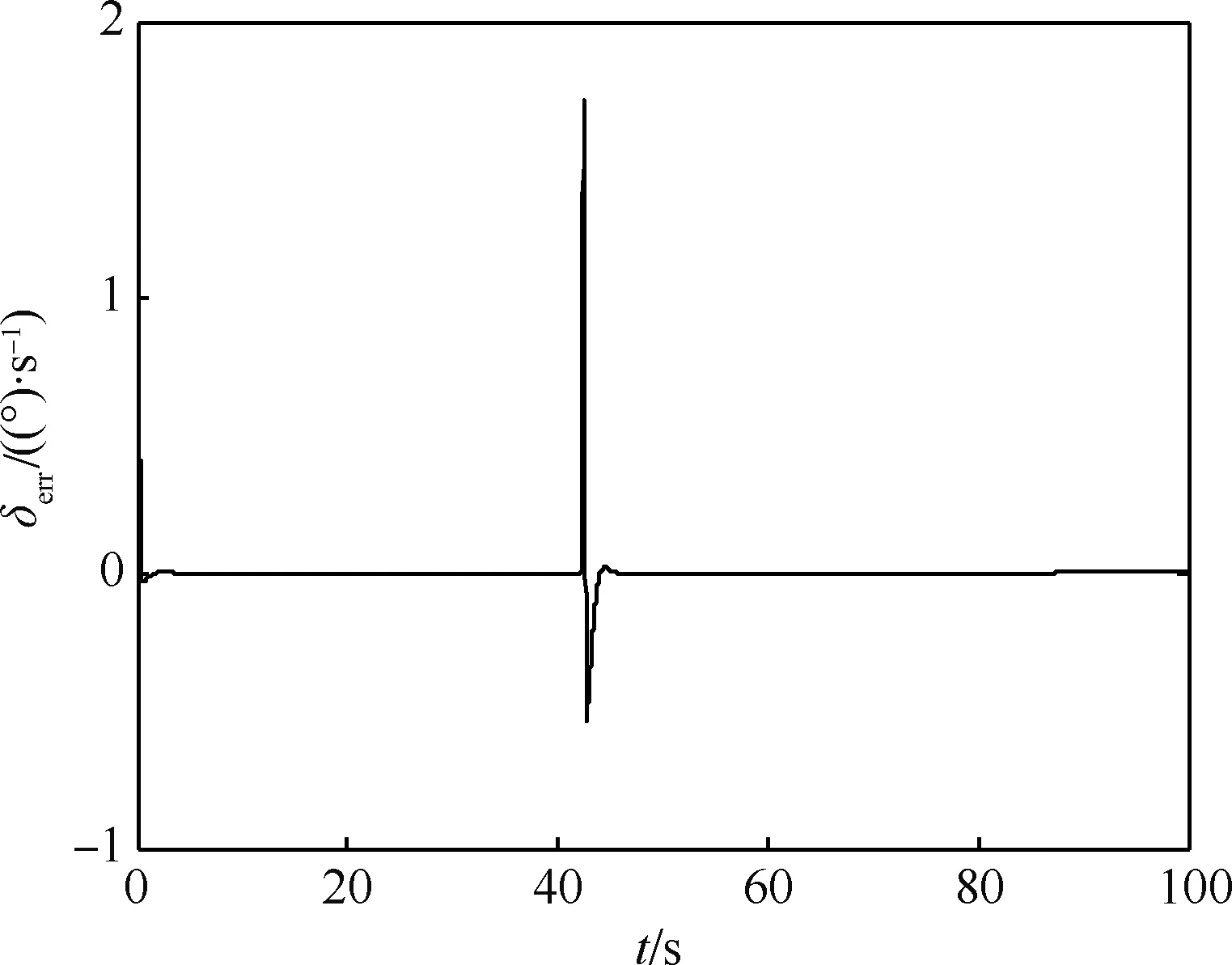
仿真结果见图14,其中图14(a)为加入速率饱和的侧杆结果,图14(b)是加入速率饱和的主动侧杆跟踪结果,俯仰跟踪任务跟踪误差e结果见图15。图16为操纵面舵角输出。主动侧杆系统舵偏角误差δerr见图17。主动侧杆误差均方根σe如图18所示。


图14 NT-33A飞机俯仰跟踪任务跟踪结果Fig.14 Tracking results of pitch tracking tasks of NT-33A airplane
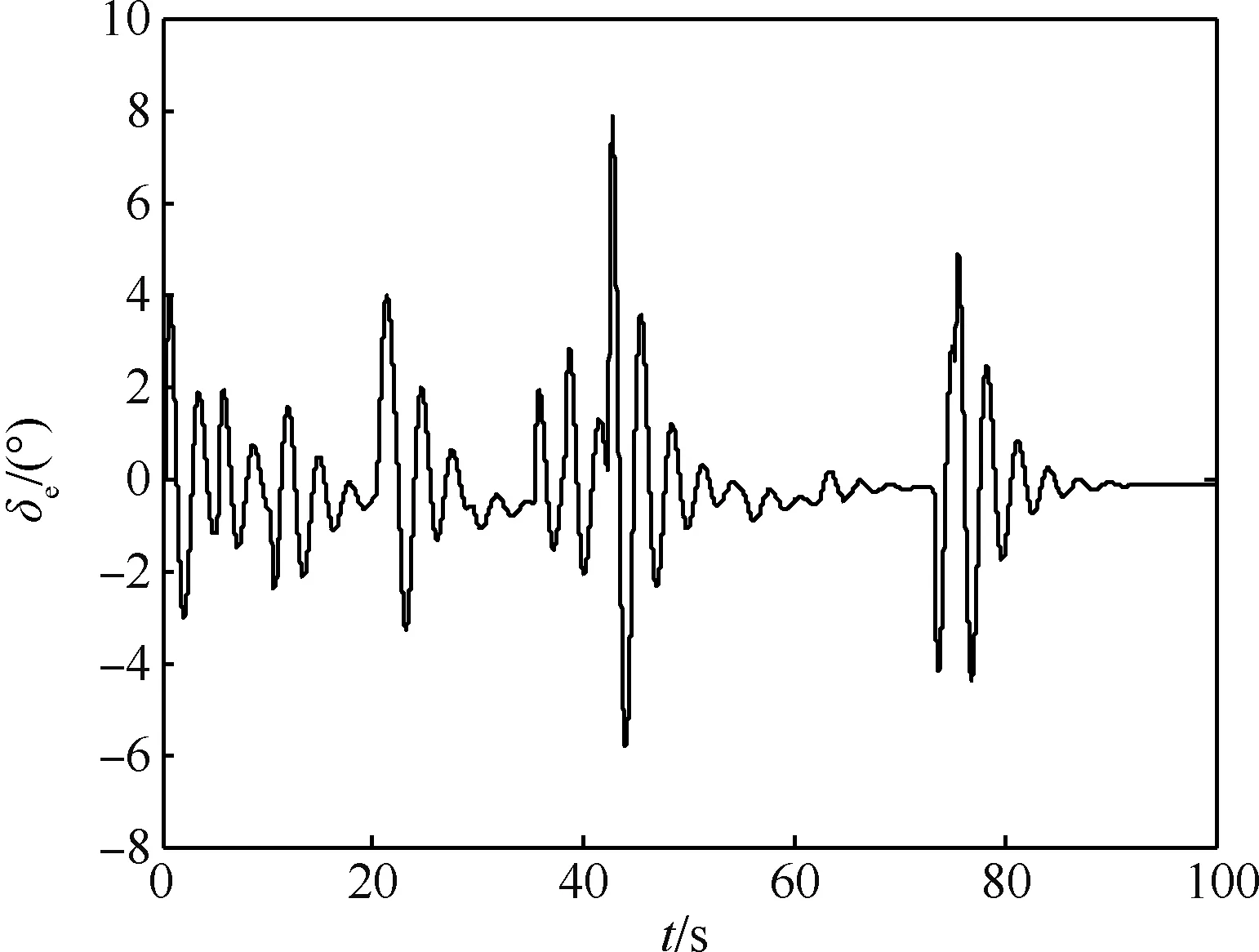
从图14中可以看出,对于离散俯仰跟踪指令信号,侧杆在前42 s跟踪较好,在42 s后发生了振荡。主动侧杆在42 s左右存在较大的超调,但最后趋于稳定。对于操纵面舵角输出(图16),可以看出侧杆发生了严重的速率饱和,产生了严重的三角波,主动侧杆在42 s和75 s左右存在三角波,其他情况基本良好,基本抑制了速率饱和。从图17可以看出主动侧杆在42 s和75 s左右,δerr发生变化, 随着k的增大,δerr的值有所降低,对速率饱和的抑制效果更好。但从图18可以看出,并非k值越大,完成任务质量越高。当k足够大使驾驶员无法推动驾驶杆时,可以抑制PIO,但却以牺牲执行任务为代价。

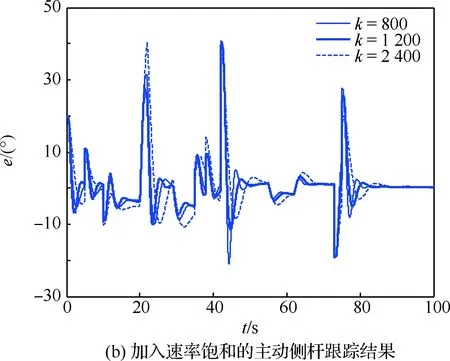
图15 NT-33A飞机俯仰跟踪任务跟踪误差Fig.15 Tracking errors of pitch tracking tasks of NT-33A airplane


图16 NT-33A飞机操纵面舵角输出Fig.16 Actuator deflection output of NT-33A airplane
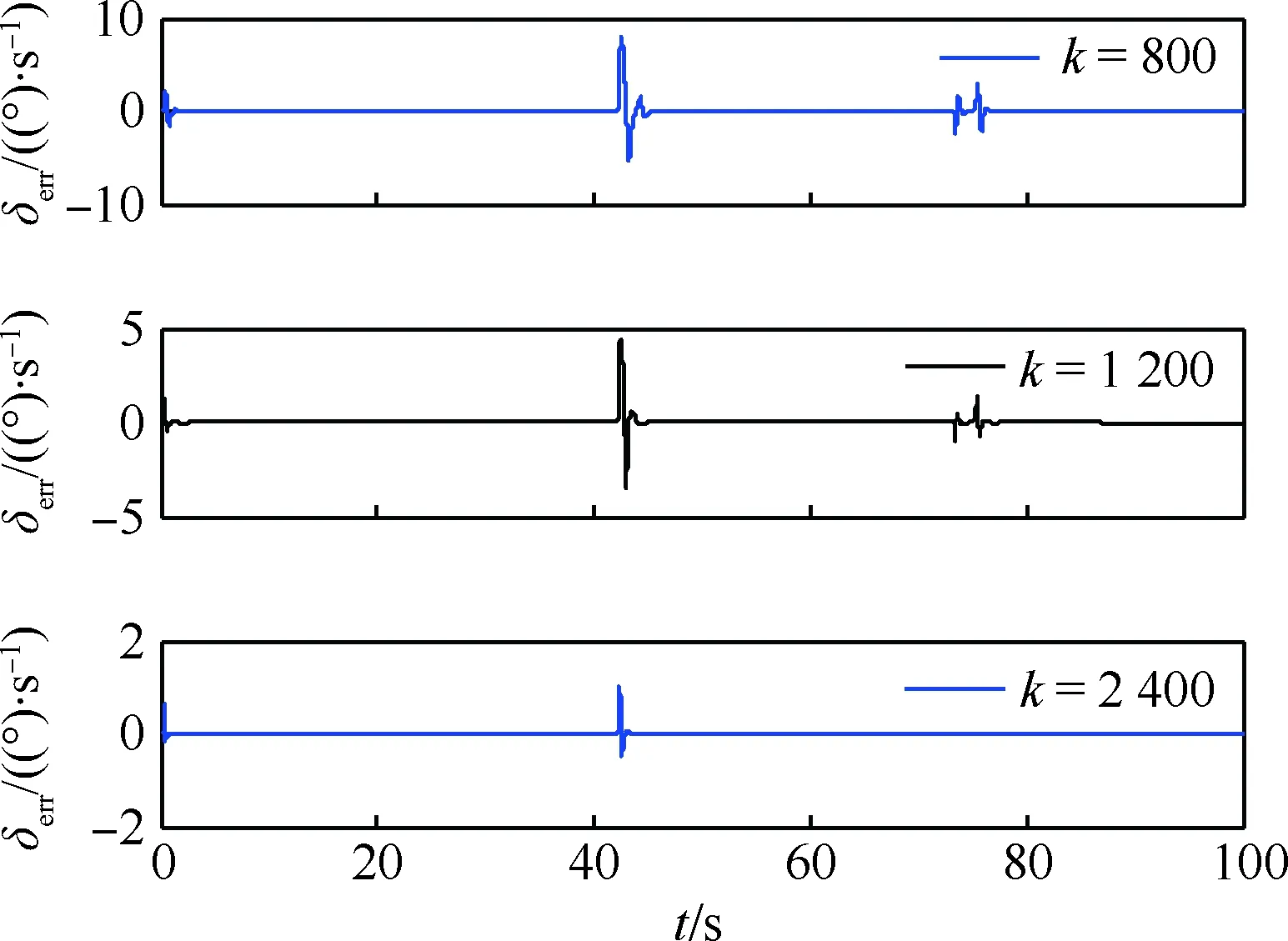
图17 NT-33A飞机主动侧杆舵偏角误差δerrFig.17 Actuator deflection error δerr of active side-sticks of NT-33A airplane

图18 NT-33A飞机误差均方根值对比Fig.18 Root mean square errors comparison of NT-33A airplane
4.2 飞行品质评估
对于单通道的飞行任务,Hess提出的飞行品质指标与PIO预测方法[23]能提供充分的定量预测和可靠的结果[31-32]。因此,本文选择飞行品质指标与PIO预测方法对主动侧杆进行评价,分析不同k值对PIO的影响。
实际飞行过程中,驾驶员常以本体感受反馈信号UM(t)的值作为衡量任务的难以度量,不同的输入量CM(t)影响UM(t)的值,故Hess[23]取QHQSF=|(UM/CM)(jω)|作为飞行品质评价指标。对于非线性系统,根据随机理论可知QHQSF的等价形式为
(5)
式中:φUMUM(ω)、φCC(ω)分别为UM(t)和CM(t)的功率谱密度。
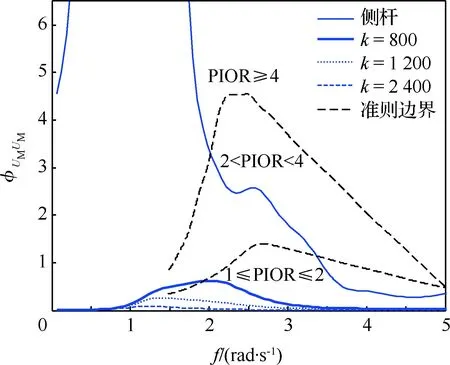
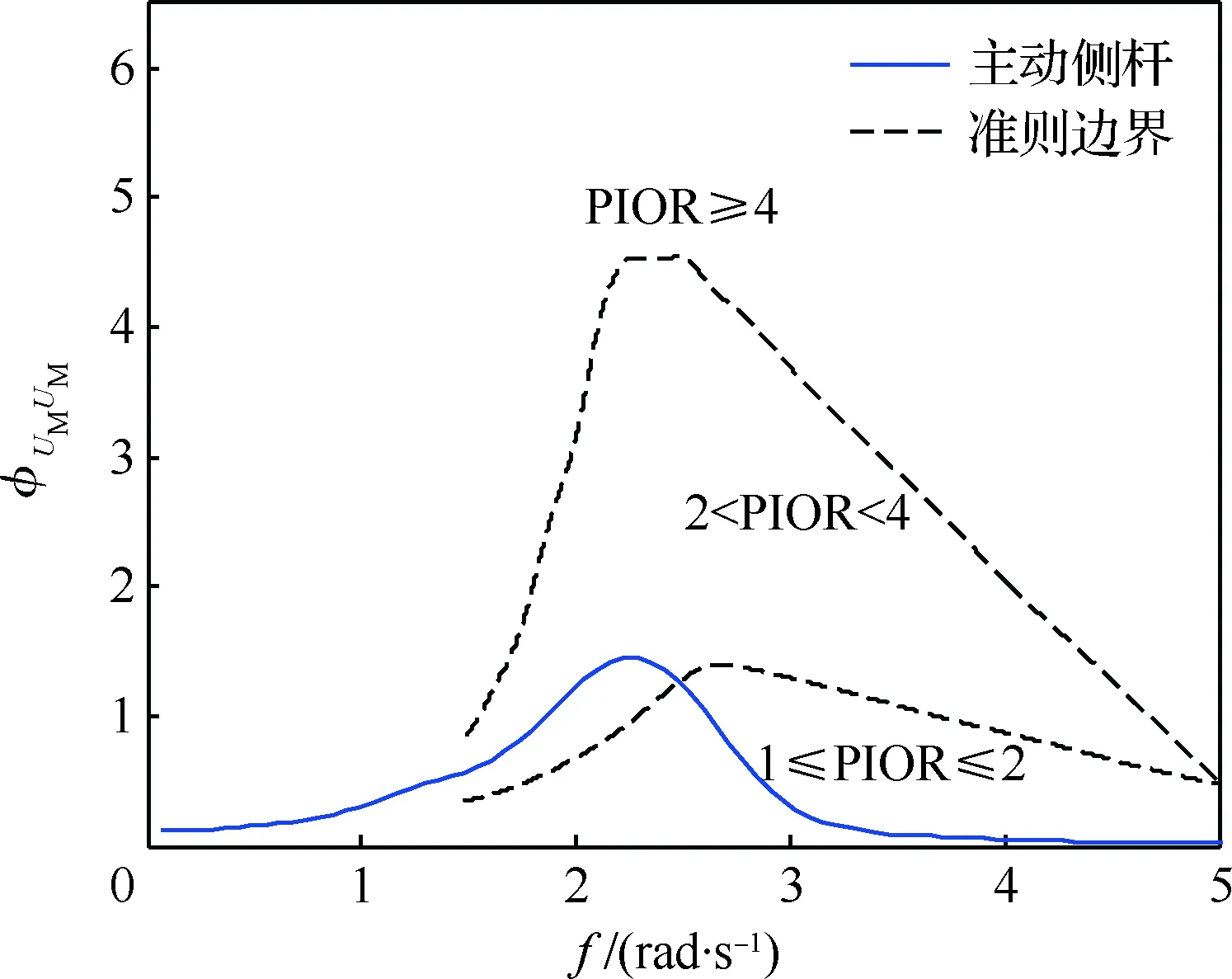
Hess通过飞行试验和模拟证明了驾驶员诱发振荡评价(PIOR)与UM(t)的功率谱密度φUMUM(ω)有关[23]。按照PIOR等级可将φUMUM分为3级,即1≤PIOR≤2,2 计算侧杆与主动侧杆的飞行品质指标与PIO预测如图19和图20所示。图19表示飞行品质指标QHQSF与频率f的关系,图20表示UM(t)的功率谱密度φUMUM(ω)与频率f的关系。从图中可以看出,普通侧杆的飞行品质达到3级,PIOR≥4。主动侧杆的飞行品质达到了1级,对于PIO预测图,随着k增大,PIO发生的几率越小。这与图17主动侧杆舵偏角误差的结论是一致的。 图19 NT-33A飞机飞行品质评价Fig.19 Handling flight qualities of NT-33A airplane 图20 NT-33A飞机PIO预测Fig.20 PIO prediction of NT-33A airplane (6) 驾驶员结构模型参数为Ye=1.359、τ0=0.2 s、YPF=2/(s+0.4)。 选择上例的人感系统特性并结合主动侧杆进行仿真,任务仍选择离散变化的俯仰跟踪。设定速率饱和为20(°)/s。 对于加入速率饱和的人机系统,没有主动侧杆的情况下,完全无法跟踪输入,造成严重发散。加入主动侧杆后,得到主动侧杆跟踪结果如图21所示,在离散俯仰跟踪任务中,42 s 输入近似阶跃函数,是跟踪任务中最严峻工作状态。主动侧杆基本能跟踪指令任务,虽快速性欠佳,但几乎不存在振荡,平稳性表现相对较好。主动侧杆俯仰跟踪任务跟踪误差结果见图22。从图23主动侧杆操纵面舵角输出中可以看出,主动侧杆在42 s和75 s左右存在三角波,其他情况基本没有出现速率饱和。主动侧杆系统舵偏角误差δerr如图24所示,在0 s和42 s左右出现了较大的变化,由于这两个时间点是比较大的阶跃响应,跟踪难度较大,相应地出现了舵偏角误差。 图21 F-16飞机俯仰跟踪任务跟踪结果Fig.21 Tracking results of pitch tracking tasks of F-16 ariplane 图22 F-16飞机俯仰跟踪任务跟踪误差Fig.22 Tracking errors of pitch tracking tasks of F-16 ariplane 主动侧杆的飞行品质指标与PIO预测如图25和图26所示。从图中可知,主动侧杆的飞行品质达到了一级,PIOR等级为2 图23 F-16飞机操纵面舵角输出Fig.23 Actuator deflection output of F-16 ariplane 图24 F-16飞机主动侧杆舵偏角误差δerrFig.24 Actuator deflection error δerrof active side-sticks of F-16 ariplane 图25 F-16飞机飞行品质评价Fig.25 Handling flight qualities of F-16 ariplane 图26 F-16飞机PIO预测Fig.26 PIO prediction of F-16 ariplane 1) 针对舵面速率饱和引起的Ⅱ型PIO问题,设计了主动侧杆人感系统。该系统根据舵偏角控制误差δerr实时对人感系统中的弹性系数k进行调整,从而达到抑制速率饱和的目的。针对主动侧杆人感系统反馈力实时变化这一特性,设计了能够描述驾驶员操纵变化的神经肌肉系统模型,该模型可用于研究主动侧杆引导下的人机闭环特性。 2) 人机闭环仿真结果表明,对于离散俯仰跟踪指令信号,采用侧杆人感系统出现严重的舵面速率饱和。采用主动侧杆人感系统基本可以跟上指令信号。基于Hess同一理论的飞行品质评价结果表明,采用侧杆人感系统的飞行品质指标达到三级,PIO评分为PIOR≥4。而主动侧杆的飞行品质达到了一级,没有发生潜在PIO的倾向。由此证明本文设计的主动侧杆人感系统有抑制速率饱和的作用。 3) 采用侧杆操纵的飞机F-16作为被控对象进行应用验证,在主动侧杆的作用下,跟踪结果几乎不存在振荡,跟踪效果较好;飞行品质指标与PIO预测结果表明没有发生潜在PIO倾向。验证结果说明了主动侧杆有助于改进F-16飞机侧杆系统的设计。 本文设计主动侧杆人感系统可以利用反馈给驾驶员的信息使驾驶员有足够的时间调整人机系统的状态,但主动侧杆的参数设计仍需进一步研究,从而更有效地抑制Ⅱ型PIO。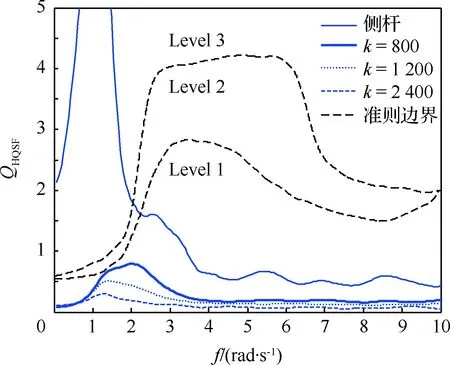
5 主动侧杆在F-16飞机上的应用验证




6 结 论
