混合动力汽车动力传动系统参数匹配研究
2018-08-29荀博深耿龙伟杨骁赵振秀
荀博深,耿龙伟,杨骁,赵振秀
(1.盐城工学院汽车学院,江苏 盐城 224051;2.英国华威大学制造工程学院,英格兰 CV47AL)
前言
近年来,可持续能源存储和管理技术得到迅速发展。因此,越来越多的电池驱动的电动汽车(BEV)或由燃料电池驱动的汽车产生。电动汽车是由牵引马达和电池驱动的,因此没有任何排放。在环保方面,电动汽车是最好的选择。然而,受限于技术发展,电动汽车行驶里程非常有限。在这种情况下,可采用大电池组和内燃机驱动以增加行驶里程。
1 设计依据
本设计方案以英国市场销量较大的电动版大众up!汽车,本设计方案的工况选择需满足以下几个要求:①3级油耗测试循环工况的的二氧化碳排放量为60g/km;②百公里加速时间16s;③高速公路巡航时速105km/h;④满载时可在1/3斜坡上启动;⑤ 最小离地间隙大于 200mm。传动系中车轮相关的假定参数依据设置如下:

表1 车轮相关的假定设计参数依据
2 车轮所需动力
2.1 车轮所需功率
汽车需在 16s内从静止加速到 100km/h,因此,车轮所需功率:

假设100km/h的瞬时功率作为电机的峰值功率。Pa为加速度功率,,其变化率随时间变化而变化。假设瞬时加速度和速度分别为0.67m/S2和27.8 m/s,则可推导出 16s所需的功率。将对应的值代入公式 1可得:Pp=P车轮=44.16kw。
2.2 车轮所需扭矩
将上述所得功率、瞬时速度和轮胎半径代入公式(2)可得:

3 布置方案设计
3.1 传动系统的布置结构选择
以大众电动版 Up!车型为参考对象,其布置结构为串联混动。在串联混动系统中,电源由大容量发动机和电池组成。串联混合动力的显著特点是发动机不需与传动系统相耦合。在这种情况下,发动机的主要功能是充电,以延长电池的续航时间[1]。如图1所示,发动机和电池输出的机械动力通过传动系统驱动车轮。
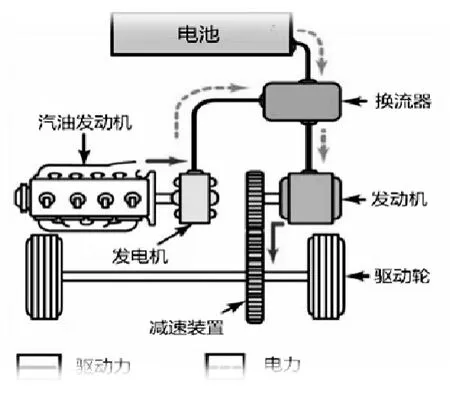
图1 串联混合结构
该串并联混合结构均可实现怠速停止、再生制动、蓄电池充电和静止[2]。串联结构的主要优势在于相对简单的结构。因此,研究和开发的成本较低;在串联混合结构中,机械结构较少,因此质量更轻;同时,发动机尺寸也大大缩小,更好的节省了布置空间。
3.2 传动系统参数设计
3.2.1 电机
电机所需要的功率取决于驱动设计方案。从最差的情况来看,所有的电力由牵引电机提供。机械动力由电机带动驱动齿轮,再传递给车轮。通常没有能量转换的传递效果较好,传输的效率η可达90%。其关系可描述如下:

因此,可得P峰值≈50kw。
额定功率应满足两种情况下的功率要求,即巡航速度105km/h稳定行驶工况,2.5s内加速至40km行驶工况[3]。车轮所需的功率可由公式(4)取代:

取代后可得:

因此,可得P巡航≈16kw。同理可得P巡航≈28kw。电机所需较大功率为电机额定功率。因此,电机的额定功率为28kw。
为了推导电机的峰值扭矩,引入公式(6)如下:

3.2.2 发动机和发电机组
发动机的设计是为了满足串联结构中稳定状态所需的功率。即巡航速度105km/h稳定行驶工况的功率等于发动机的额定功率,这里不考虑多重转换产生的能量损耗。假设从发动机到发电机的能量转换效率(ηe-g)为 95%;从发电机到电能的能量转换效率(ηg-pe)为70%;从电能到电机的能量转换效率(ηpe-m)为80%,机械传动效率(ηm-w)为90%。将效率值代入公式(7)如下:

因此,可得P额定≈27kw。
3.2.3 蓄电池
忽略能源管理控制策略不计,整个循环由低相位、中相位、高相位和额外高相位组成。(Up!车型属于 3b级是由于其处于工作状态的功率质量之比不足 75kg,比率大于 34W/kg,最高速度≥ 120km/h[5])。最差情况下的电动汽车更易于计算和推导。

图2 EV模式在整个3b能量循环工况曲线图
如图2为整个WLTC在3b级驱动循环的牵引、制动和总能量,且都来源于蓄电池。由图可知,在任何时刻,车轮所需总能量应该等于相应的牵引能量减去相应的制动能量,描述如下:
但实际上再生制动效率不可能达到 100%。在制动过程中,受滑动摩擦影响,车轮表面的动能转换成了热能,因此,假设车轮的再生制动效率ηw=40%[6]。假设再生能量从传动系流向电机的效率 ηw-m=90%。在制动过程中电机也将机械能转化为电能,假设效率 ηm-pe=80%。在此之后,电能经逆变器转化成电化学能储存到蓄电池中,假定效率 ηpe-b=90%。最后,假设电池的放电效率ηb=95%。综上所述,蓄电池中储存的可再生制动能量:

相反,蓄电池中释放出来的牵引能量会在蓄电池向车轮的流动过程中损失。假设蓄电池到车轮的转换效率在两个方向上相同,可描述如下:

代入公式(7)可得E总=4.89kwh。
由于整个驱动循环被假定为在EV模式下驱动,电池容量可以通过乘以完成的WLTC 3b循环的数量来计算。电动版Up!可以跑到电池耗尽从3b循环中需求能量。使用公式(11)进行计算:

在整个驱动周期的范围由电控单元控制,这里取 Range周期=23.266km,电动汽车 Up!在 WLTC循环中指定行驶范围为120km,该值小于电动汽车e-Up! (NEDC)[5]。代入公式(11)可得:E蓄电池=25.22kmh。综上所述,本文选择ANR26650型号蓄电池,并提出整个电池的布置由10个串联模块组成,每个模块由10个并联组组成,并联布置32节电池,其参数如下表2所示。

表2 蓄电池及其布置的技术参数规格
4 驱动模式设计
图3所示为Up!中管理控制系统。根据自动控制策略,确定驱动模式。电控系统在短时间内循环算法,根据输入的不同来确定最合适的驱动模式。根据该算法产生三种不同的驱动模式,以确定最佳的能源使用及管理情况,并将SOC保持在20%到80%之间[5]。
4.1 强制充电模式
汽车启动后,单片机开始检查电池组的充电状态。为了使锂离子电池组的生命周期最大化,防止SOC值下降,与此同时保持燃料油位为 0%,在此情况下对蓄电池进行强制充电。此外,在这种模式下,需限制牵引电机和ICE的运行以达到能耗最低的目的。
4.2 增程模式
如果当 SOC低于 10%且燃料罐不是空的,单片机就会触发,此时,启动牵引电机和 ICE给蓄电池充电。若 SOC<40%,则传感器将检查油箱以确定是否开启ICE进行充电。如果燃料油位高于 0%,则由单片机选择混动模式自动启动ICE给蓄电池充电。若油箱是空的,尽管SOC<40%,汽车仍将保持电动模式。一旦 SOC>40%,驾驶员可选择关闭 ICE以增程模式来进行移动充电。
4.3 电动模式
当检测到SOC>80%时,由于放电速率变快,ICE将会自动关闭。

图3 驱动模式管理控制系统
5 制动系统(能量回收)
再生制动系统是混合动力汽车广泛应用的制动系统。在制动过程中,牵引电机可以反向旋转以恢复动能干扰扭矩。与此同时,牵引电机也可以像发电机一样将能量转化为储存在储能系统中的电能[5]。为了实现必要的稳态制动以确定制动力如何分布在前轴和后轴上。通常情况下,混合动力汽车有两种制动控制策略[5]:串联制动和平行制动。其中,串联制动系统可以给驾驶员更好的制动感觉以及更好的回收能量。但是串联制动系统的控制系统相对较为复杂,研发投入较大。而平行制动从再生制动中回收动能较少,更多的是依靠较简单的控制策略来确保稳定性。考虑到成本与稳定性,本文选择并行制动系统。
6 结论
本设计方案针对纯电动车的不足之处,参考混动版典范汽车大众 Up!车型。讨论、设计并研究了混动汽车设计过程中所需的动力计算过程、动力传动系统的结构布置、结构参数设计,其中包括电机、发动机和发电机以及蓄电池的结构参数设计及计算过程,研究了三种驱动模式,分别是强制充电模式、增程模式、电动模式,最后选择了较为适合混动汽车的再生制动系统,为今后能在混合动力汽车设计方面提供一定的参考。
