无人水下航行器在水电站隧洞检查中的应用探讨
2018-08-28滕世敏周建波
杨 鸽,滕世敏,周建波
(国家能源局大坝安全监察中心,浙江杭州,311122)
水工隧洞的安全运行对保证水电站生产活动的正常开展有重要作用,为此,电力企业会对隧洞进行放空检查以了解其运行情况。但是,放空检查一般耗时较长、成本较高,而当隧洞中存在高差较大(例如大于50 m)的竖井、坡度较陡的斜井时,常规的人工检查和潜水员的水下作业都很难开展。
近年来,无人水下航行器在水库大坝检查中已有较多应用,包括对水库库底、电站消力池、大坝坝面、闸门等检查,涉及的水利水电工程包括阿海[1]、天荒坪、葛洲坝、毛家坪、金钟、东圳、仙游[2]、三渡溪[3]以及太平湾[4]等。如能将水下航行器技术应用于水工隧洞检查、取代隧洞放空人工检查,可减少检查停机时间,从而降低检查成本;此外,还可对竖井等常规人工检查手段无法到达的区域进行检查。
为此,在对水下航行器系统组成、原理以及现有应用案例进行分析的基础上,探讨水下航行器在水工隧洞检修中存在的困难,分析可能的解决途径。
1 无人水下航行器的系统构成
水下航行器按照其是否能够载人分为载人航行器(Human Occupied Vehicle,HOV)和无人航行器(Unmanned Underwater Vehicle,UUV)。载人水下航行器由潜水员和科学家通过观察窗直接观察外部环境做出核心决策,因此可处理较复杂问题;但是,由于必须提供可靠的生命安全保障和生命维持系统,载人水下航行器体积庞大、系统复杂,且造价高昂。与之相比,无人水下航行器体型更加灵活、系统相对简单,更适合长时间、大范围和大深度的水下作业,而且造价也更加低廉。因此,在包括水利行业在内的民用领域,现阶段都只见无人水下航行器的应用案例。
无人水下航行器系统包括航行器本体和地面(母船)支持系统。地面(母船)支持系统由保障对水下航行器实施布放回收、能源供给、指挥控制等的功能系统构成。航行器本体由控制系统、载体结构、能源系统、推进系统、通信系统、导航定位系统和作业系统等组成。
针对水工隧洞检查,从现有水下航行器产品中进行选型时,首要需确定控制系统,控制系统确定后其载体结构、能源系统、通信系统以及推进系统就基本随之被确定,接下来再根据对检查成果精度的要求选择搭载的观察成像系统和定位导航系统。
1.1 控制系统
控制系统是无人水下航行器的大脑,分为遥控型和自主型,自主型又进一步细分为预编程型和智能型。
遥控型水下航行器(Remotely Operated Vehicle,ROV)通过电缆或光纤与水上控制系统连接,工作中实时接收并遵守地面控制系统所发出的指令。自主型水下航行器(Autonomous Underwater Vehicle,AUV)中,预编程型水下航行器在完成使命的过程中完全执行预定的程序,不具备根据环境变化而重新做出规划和决策的反应能力;智能型水下航行器则具有在未知环境中建立环境模型,根据模型重新做出决策和规划的能力。ROV和AUV通常又分别被称有缆水下航行器和无缆水下航行器。
能源系统方面,ROV一般由水面电源通过电缆供电,AUV目前则多采用能量密度和比能量都较高的蓄电池类化学式动力源,早期曾采用铅酸电池和银锌电池,现常用锂离子电池。
载体结构方面,由于电缆供电可提供较充足的动力,ROV一般采用框架式载体。这种形式虽然运行阻力较大,但水下机器人总体布置比较方便,容易加挂和换装载体上的设备仪器。AUV则通常需要采用鱼雷形或扁平形载体,这是由于AUV所携带的能源有限,为增加水下运行时间、减小动力消耗,需尽量减少游动阻力。
通信系统方面,ROV一般采用交流载波或光纤通信,具有通信容量大、抗电磁干扰、保密性好、体积小、重量轻、价格便宜等优点。对于无缆的AUV,由于地面通信常用的电磁波在水下衰减极快、传输距离很短,AUV在水下时一般采用水声通信,浮出水面后方可采用无线电、卫星及以太网等通信手段。
值得注意的是,除了ROV和AUV,还可见到一种综合了ROV和AUV特点的复合型水下航行器(Autonomous Remotely Vehicle,ARV)。ARV用微细光缆代替传统的脐带电缆向机器人传送控制信号,同时,自带电源而不采用电缆供电。因而,与AUV相比,ARV在水下的运动更加机动灵活、精细作业能力更强;与ROV相比,纤细轻盈的光纤减小了航行器的负担,使其活动范围大大提升。
1.2 观察成像系统
水工隧洞检查的主要任务是获取反映洞内情况的影像资料,因此其作业系统主要为观察成像系统,也可搭载机械手用于辅助完成持尺测量以及移除障碍物等简单操作。
按照成像原理,观察成像系统分为声呐成像和光电成像系统。声呐成像系统利用声波传播和反射原理,通过发射和接收声波形成回声图像,常用的设备包括侧扫声呐、多波束成像声呐以及合成孔径声呐等[5]。水下光电成像系统利用光电技术获得图像视频,如水下摄录机、照相机以及激光扫描成像设备等;此外,成像系统还应包括水下探照灯、控制器、视频监视器和电缆等辅助设备。
1.3 定位导航系统
定位导航系统为无人水下航行器提供位置、航向、深度、速度和姿态等信息,以保障航行器安全航行或作业。导航方法可分为自主导航、非自主导航以及视觉导航。
1.3.1 自主导航
自主定位是指航行器不依赖外界导航信息,仅靠自身定位设备产生的信息实现载体定位和导航的方式,例如惯性导航、多普勒导航、地磁导航以及地形导航等。值得注意的是,惯导系统从初始条件起通过积分运算来推算导航参数,因而其导航精度在开始工作的较短时间内很高,随着时间增长,误差积累使精度降低。因此,对于需要长时间导航的载体,必须依靠其他外部导航设备提供的信息进行校正,以确保长时间导航精度的要求[5],即“捷联导航”。
1.3.2 非自主导航
非自主导航需依赖外部辅助导航设备。常用的非自主导航定位为水声定位系统,其工作原理为:水下航行器上的声源发出脉冲,被设在母船或地面上的声学传感器接收到脉冲信号,经过处理和按预定的数学模型进行计算,得到声源的位置。
1.3.3 视觉导航
视觉导航利用成像设备将水下环境和目标的信息传递到水面控制台,操作人员凭借所看到的图像控制航行器的运动和作业。
2 应用现状及案例
无人水下航行器在水利水电工程中的应用可分为在开放水域(如库区、河道等)和洞室水域(如隧洞、调压井、竖井、管道等)。航行器在开放水域中的工作条件与在海洋中相似,故起源于海洋工程中的水下航行器在水利水电工程开阔水域中的应用并未遇到新难题,已经有较多成功的应用案例。
而在封闭洞室中,水下航行器原有的通信、导航以及观察成像技术都遇到了不同程度的困难,目前成功应用的案例并不多,且大多为断面较小、长度较短的直线隧洞(管道)。现有案例包括二滩水电站压力管道[6]、锦屏二级电站进水口[7]、南水电站引水隧洞[8]、珠江南段隧洞等。其中,除锦屏二级进水口和二滩压力管道直径较大外,其他隧洞(管道)的直径为3~4 m左右,而隧洞(管道)检查段的长度仅100~200 m。
2.1 珠江南段隧洞及输气管道检查
该隧洞全长1 480 m,隧洞直径为3.08 m,洞内采用平板型单层管片衬砌。隧洞满水运行,洞内有两条天然气输气管道伴行。隧洞起止端各有一直径为9.3 m的竖井,深度分别为23.5 m和28.3 m,采用钢筋混凝土衬砌。
隧洞中输气管道检查选用Mojave观察级ROV,其工作深度为300 m,有效负载15 kg。配置14 mm、12芯微浮力脐缆,外带屏蔽,内置凯夫拉纤维,抗拉强度为300 kg,缆重94 kg/km。搭载Tritech Micro DST耐压750 m声呐用于定位。搭载470TV线22倍变焦水下彩色摄影机2台,用于获取视频、图像资料,辅以360°云台、LED等设备。地面支持系统方面,采用ROV标准控制单元,包括视频监视器、水下灯光控制器、视频叠加设备、自动定深设备等。另外,配有用于ROV释放回收的吊机、绞车以及发电机设备等。
检查发现隧洞内伴行的两条输气管道存在管体划伤、局部防腐层破损(管体发绿)、杂物同防腐层粘连以及管体修补、焊口不平整、防腐层划伤等缺陷。隧洞中输气管道部分检查结果如图1所示。
2.2 二滩水电站压力管道检查
二滩水电站压力管道直径9 m,由渐变段、上平段、上弯段(R=30 m)、竖井段(高70 m)、下弯段(R=30 m)以及下平段组成,轴线长度322 m,最大水深200 m。
水下检查选用观察级ROV,前进推力900 N,垂直推力400 N,侧向推力250 N。前、后、左、右各搭载一台低照度环境的高清摄像机,并搭载BlueView 900-130型二维图像声呐,综合视频摄像、扫描声呐、陀螺仪、高度计、磁罗经、深度计、测绳等系统进行定姿、定位。为保证航行器在直角弯处顺利通行,避免电缆与管壁剐蹭,并减少拖曳阻力,采用零浮力电缆。
环隧洞内壁圆环截面布置检查测线,相邻测线间距约2~3 m,以避免线缆缠绕。检查发现衬砌接缝不平整、细微裂缝、混凝土局部脱落、钙质析出等轻微缺陷50余处,集中出现在上弯段与竖井段,部分检查结果如图2所示。
3 水下航行器检查水工隧洞存在的问题及对策分析
3.1 声信号多途反射,水声技术应用受影响
由于声波在水中传播时的损耗远小于电磁波和光波,水声技术被广泛应用于水下航行器的定位导航、观察成像及信息通信。在水工隧洞中,由于水体四周为围岩、钢筋混凝土或钢管,在狭小空间中发射的声波在洞壁产生多次反射相干,形成复杂的混响背景,导致回波信号的信噪比降低,解析难度大大增加,使各种水声技术的应用受到不同程度的影响。

图1 珠江南段隧洞中输气管道水下检查部分结果Fig.1 Results of underwater inspection of gas pipeline in the tunnel of southern section of Zhujiang river
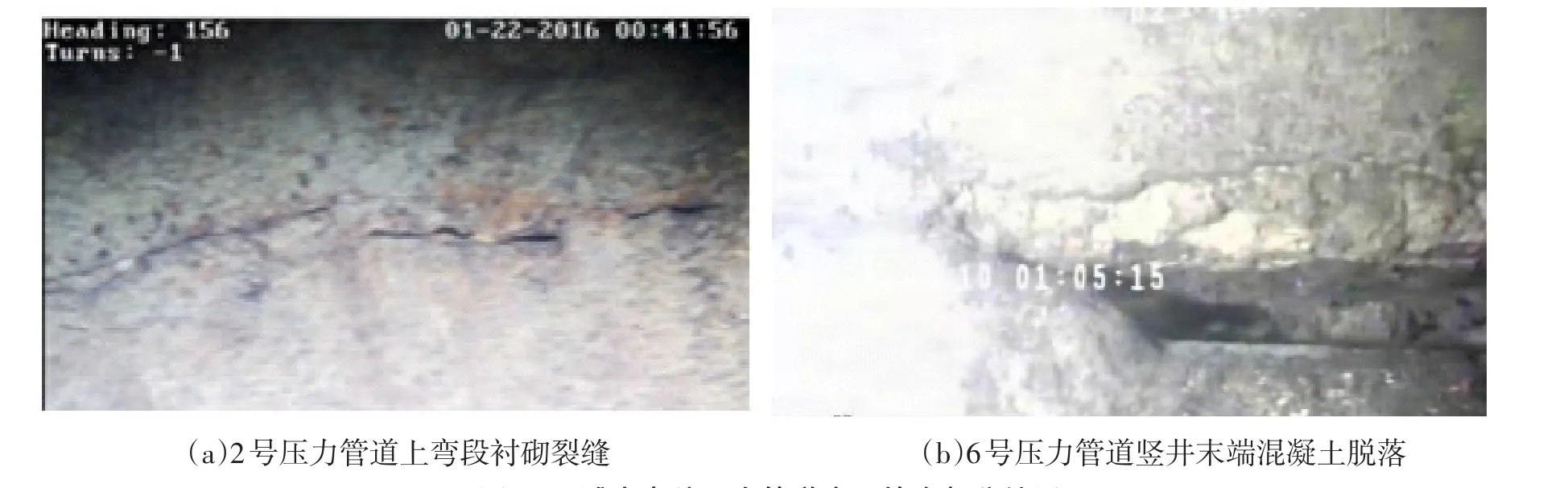
图2 二滩水电站压力管道水下检查部分结果Fig.2 Results of underwater inspection of penstock in Ertan hydropower station
具体地,对于水声定位导航技术,由于采用的声波频率较低(约为10 kHz左右)[9],抗干扰能力较弱,因而在回波信号干扰较强的隧洞(管道)中几乎无法正常工作。而对于声呐成像技术,虽然其声波频率较高,抗干扰能力较强,但多次反射波干扰将降低回波信号的信噪比,影响成像质量。各种声呐技术的声波工作频率范围如图3所示。
3.2 洞径大,较难清晰成像
由于水介质对可见光有较强的吸收和散射作用,光能量衰减较快,其传播距离仅为透明空气中的千分之一。理论上,水下光电成像设备的可视距离约为30 m左右,蓝绿光在水中衰减相对较小,水下可视距离可达100 m以上[10],但在实际操作中,水下光电设备在自然水体中的可视距离一般不超过10 m,有效成像范围约为5 m左右,而且水质越浑浊,可见距离越小。水工隧洞直径动辄十余米,水体中还包含泥沙、浮游生物等杂质,因而采用光电成像设备较难获得洞壁的清晰图像。
为获得较为清晰的图像,目前常用的方案之一是使航行器紧贴隧洞洞壁来回行进多次,每次仅观察行驶路径附近较小区域。这一方法虽然技术可行,但工作量非常大,检查效率较低。当可视范围约1 m时,单次检查洞壁区域宽度不大于2 m,对于大直径水工隧洞,需要来回折返10余次才能覆盖整个环形洞壁。当洞内有淤积或洞壁有附着物时,航行器贴壁行驶时将扰动淤积物和附着物,使水体变得浑浊,更加影响检查效果和检查效率。
除了改进行驶路径,另一种思路是采用声呐成像。为保证声呐成像精度,声呐设备的声波频率一般要求在0.5 MHz以上。当前部分主流厂商的成像声呐设备标称的最高工作频率和成像分辨率见表1所示。值得注意的是,虽然各产品标称的分辨率都达到了厘米甚至毫米级,但实际成像质量与设备的工作环境、条件等多种因素有关,可能并不一定能够达到预期效果,国外部分设备的声呐成像图像见图4。
3.3 洞轴线非直线,缆线在转弯处摩擦受阻
很多水工隧洞轴线并非直线,在平面和剖面皆可能存在转弯。当采用ROV或ARV对此类隧洞进行检查时,ROV的脐带缆(或ARV光纤)在隧洞拐弯处与洞壁接触,发生摩擦,一方面会增大航行器的行进阻力,另一方面还可能使脐带缆(光纤)发生断裂。总的来说,隧洞拐弯次数越多、拐角越大、转弯处距离航行器入口和出口处越远以及隧洞总长度越长,检查的难度越大。
为应对上述情况,可采用的措施有如下几种,具体实施时,需综合考虑工程实际情况、有机结合各种措施:
(1)采用零浮力脐带缆,尽量使缆绳悬浮在水中、避免与洞壁接触。
(2)提升脐带缆(光纤)强度,降低其被拉断的可能性。
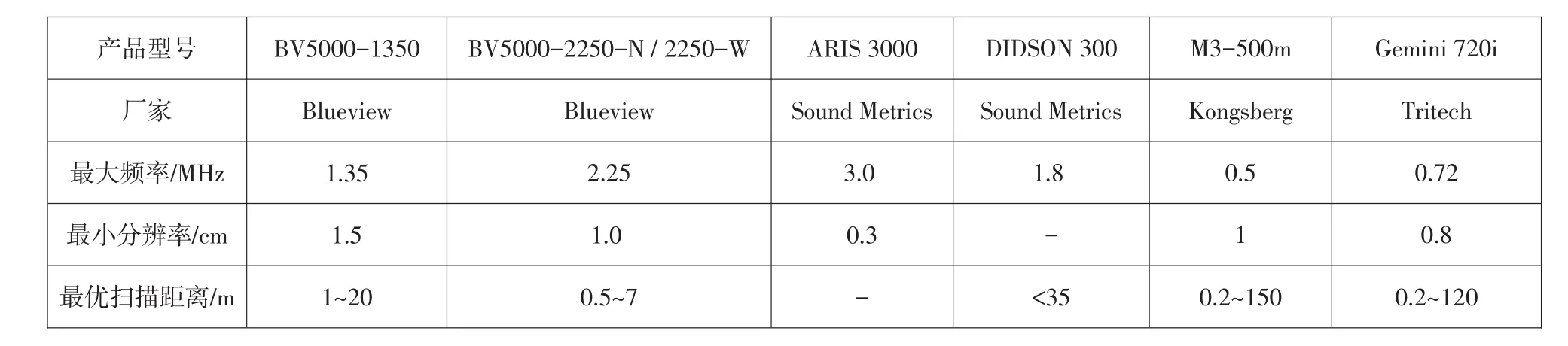
表1 国外部分主流厂商旗舰成像声呐分辨率Table 1 Resolution of sonar imaging from mainstream manufacturers
(3)提升航行器推进力和动力,保证能够顺利前行。对于通过脐带缆供电的航行器,该措施较容易实现;而对于搭载电池电源、使用光纤传输控制信号的航行器,更强的推进力意味着更大的能耗,进而需要更大或更高效的电池。更大的电池将导致更大的自重,反过来又需要更强的推进力;更高效的电池则意味着成本的提高,而且技术也不一定能够实现。
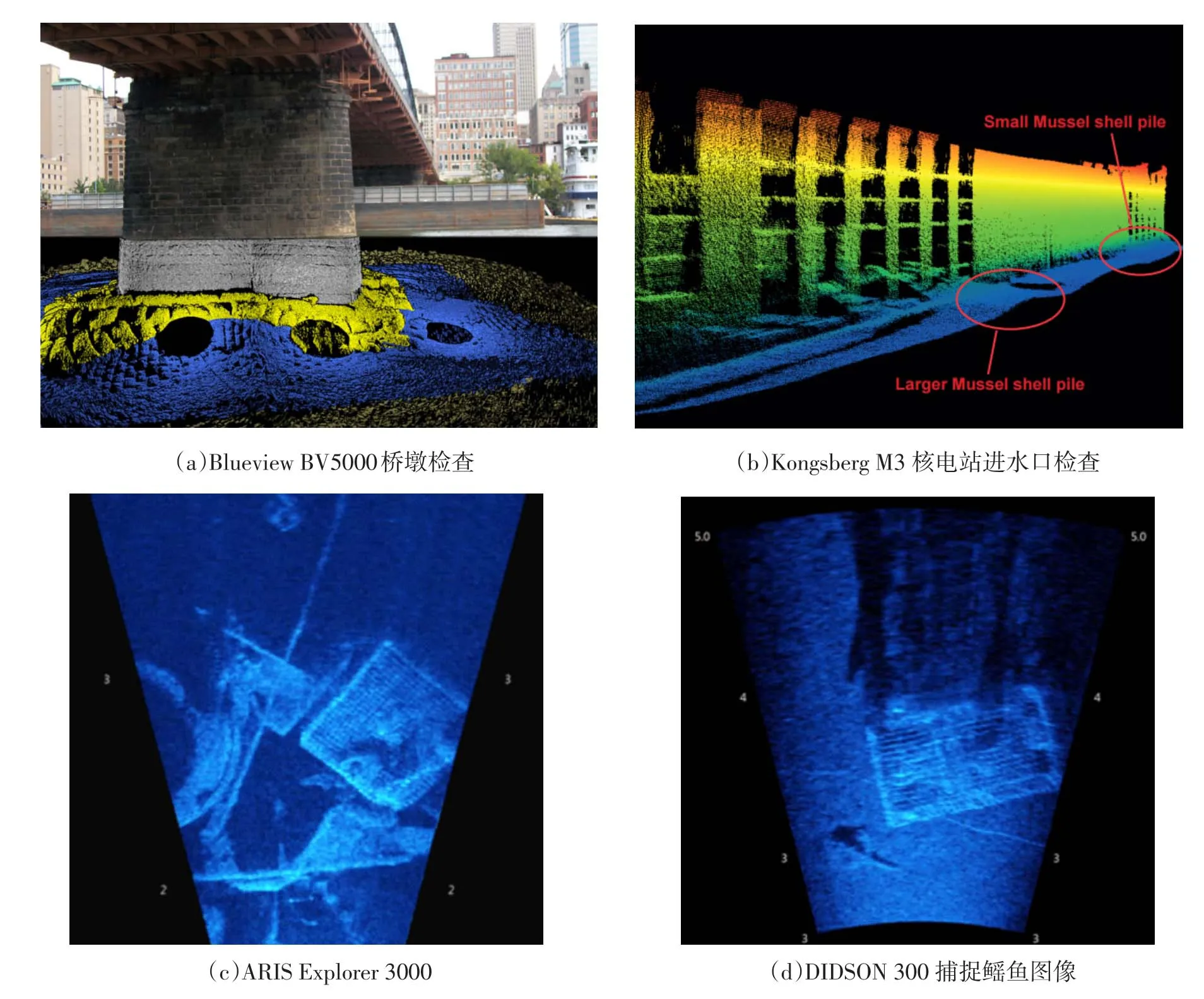
图4 国外部分主流厂商旗舰多波束声呐成像成果Fig.4 Results of flagship multi-beam sonar imaging from mainstream manufacturers
(4)超量放缆,避免脐带缆(光纤)出现过于紧绷的状态。实际操作中,超量放缆的时机和量对效果的影响较大——开始太晚或超量太少时,脐带缆(光纤)依旧会紧绷、并在拐弯处发生较严重的摩擦;开始太早、超量太多则可能会出现脐带缆(光纤)缠绕问题。因此,超量放缆这一措施对现场工作人员的技能和经验依赖程度较高。此外,超量放缆还会导致较难再通过放缆长度对航行器进行定位。
(5)转弯处设置导向装置,避免脐带缆(光纤)与洞壁直接接触。导向装置可为类似于定滑轮的设备,通过滚动摩擦替代滑动摩擦,可有效缓解问题。但这一措施存在的问题在于:目前民用水下航行器搭载的机械手基本没有能力安装导向装置,需要人工完成上述工作。
3.4 洞线长,行进阻力大
水工隧洞长度从数百米到十余千米,如采用ROV对长隧洞进行检查,航行器将需要克服较大的电缆重力和缆线阻力。缆线阻力是指脐带缆(光纤)在水中运动时产生的摩擦阻力和粘性压差阻力。其中,摩擦阻力与系统的湿表面积有关,粘性压差阻力与体型有关。随着电缆长度增加,其表面积增加,相应摩擦阻力增大。张艳辉[11]计算了一直径为4.25 mm的电缆在不同的流速下电缆阻力随行进距离的变化情况,如图5所示,电缆阻力随运动距离的增大呈直线上升(由于该计算所采用的水深为1 m,电缆入水角度保持为90°,可认为行进距离近似等于缆长)。为应对上述情况,可考虑采用的措施如下:
(1)采用零浮力缆线,可较大程度缓解电缆重力带来的问题。
(2)提升航行器的推进力和动力。但是,如无法提升推进系统的效率,更强的推进力通常需要更大功率的能源供应,这对于ROV通常需要更粗的脐带缆,而脐带缆直径增大又会增大表面积,进而增大摩擦阻力。
(3)采用ARV。ARV所采用的光纤的自重和表面积都远小于电缆,因而可很大程度减小航行器的行进阻力。但是,光纤的抗拉强度一般也小于铠装电缆,因而更容易发生断裂等问题。此外,ARV本体自带电池的供能模式使其在水下的工作时间和行进距离受到一定限制。
此外,不采用电缆和光纤的AUV自然可避免缆线重力大、阻力大、断裂等一系列问题。但是,目前民用领域采用的AUV在复杂路线(例如“紧贴洞壁往返”)行进、自动甄别锁定问题等方面还存在一定局限,而且遥控AUV的声波指令和AUV应答信息也无法在隧洞中正常传播。另外,实际应用中还需考虑万一航行器在隧洞工作时发生故障,如何对其进行定位和回收,以避免对发电系统造成影响。
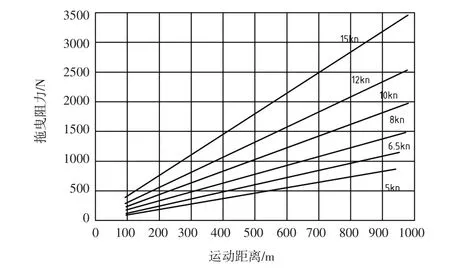
图5 缆线阻力随行进距离和速度的变化Fig.5 Tether force VS speed of vehicle
4 结语
起源于海洋工程的水下航行器技术在水利水电工程开阔水域中已有较多成功应用的案例,但在水工隧洞检查中应用尚少。随着近年长引水电站和抽水蓄能电站的大量建成,对水工隧洞的检查日益迫切,以往的放空人工检查方式已无法适用,水下航行器在水工隧洞检查中将发挥重要作用。
