轮式移动焊接机器人自适应反演滑模控制*
2018-08-22张元亨普杰信杨婷婷
张 森,张元亨,普杰信,金 超,杨婷婷
(河南科技大学信息工程学院,河南 洛阳 471023)
0 引言
焊接机器人能够代替人工完成某些特殊环境下的焊接任务,但工业生产中所应用的焊接机器人大多位置固定,通过安装在固定基座上的焊接机械臂完成焊接任务,由于焊接机械臂的活动范围有限,使得整个焊接机器人系统的工作范围和对象受到限制。而移动式焊接机器人由移动基座和固定于基座上的焊接机械臂组成,比固定式焊接机器人适应性更强,更为灵活,在舰船制造、大型球罐焊接、军用特定环境焊接等方面具有广阔的应用前景[1-4]。
移动焊接机器人系统具有多变量、强耦合、非线性的特点,工作环境复杂,系统易受到外界干扰和参数摄动的影响,不确定性强,使用单一控制方法难以完成高精度的轨迹跟踪控制任务,而且由于非完整约束的存在,轮式移动焊接机器人不满足Brockett必要条件[5],现代控制理论中大量以连续状态反馈为主的控制方法无法直接应用到其控制中。因此,移动焊接机器人跟踪控制精度的研究对焊接自动化研究领域具有重要意义。
文献[6]提出了一种改进的PID轨迹跟踪控制器,得到了较好的跟踪效果,但该控制器的鲁棒性较差,受到外界干扰容易造成系统的不稳定。文献[7-8]提出了一种有限输入转矩下的轨迹跟踪控制器,但在设计时未考虑未知参数的影响。文献[9]根据移动机器人的侧向误差和角度误差设计出引导角,并将该引导角作为虚拟输入,结合反演方法设计了基于运动学模型的轨迹跟踪控制律。文献[10]利用积分反演方法和Lyapunov直接法设计轨迹跟踪控制器,完成了对满足特定条件的参考模型的全局指数跟踪。文献[11]提出了一种统一控制器设计方法,可实现对参数不确定的轮式移动机器人的轨迹跟踪控制。文献[12]基于轮式移动机器人的运动学模型提出了一种降维状态观测器,可利用位置信息估计姿态角,构造全局状态反馈轨迹跟踪控制律实现对期望轨迹的跟踪控制。文献[13]利用横截函数的思想设计了全局稳定自适应控制器,实现了对任意参考轨迹的跟踪。文献[14]针对含有未知参数的轮式移动机器人的轨迹跟踪问题,提出了一种鲁棒自适应控制策略。文献[15]忽略机器人的动力学特性,通过反馈线性化的方法设计了运动学跟踪控制器,根据计算出的期望轨迹和实际轨迹间的偏差进行负反馈控制,虽然控制率简单可靠,但无法保证系统在受到外界扰动和参数摄动时的稳定性。滑模控制方法[16]和视觉伺服方法[17]在轨迹跟踪控制问题中也有应用。现有的研究方法多是根据移动焊接机器人的运动学模型设计跟踪控制器,难以实现良好的跟踪控制效果,即便考虑了其动力学特性,由于现实中无法获得机器人精确完备的动力学模型,使得动力学模型在受到外界扰动和参数摄动时,系统变得不稳定,难以达到预期的跟踪控制效果。
本文同时建立移动焊接机器人的运动学和动力学模型,将自适应反演算法与滑模变结构控制方法结合,设计了焊接机器人的自适应反演滑模变结构轨迹跟踪控制器,利用Lyapunov稳定性理论对系统的稳定性进行分析,该控制器能有效克服参数摄动和外部扰动对系统的影响,完成对期望轨迹的精确跟踪任务,且跟踪误差能在有限时间内收敛。最后,利用计算机通过与常规的滑模控制算法进行仿真对比来验证所提出的算法的有效性和优越性。
1 系统运动学模型
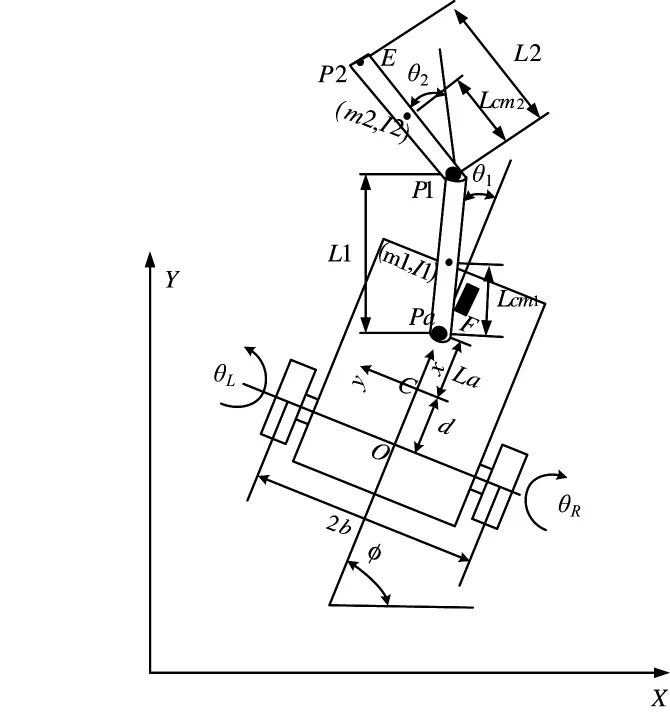
图1 移动焊接机器人结构示意图
考虑图1所示受非完整约束的差分驱动轮式移动焊接机器人系统[18],该系统由轮式移动平台和安装在平台上的机械臂组成,焊枪安装在机械臂的末端,移动平台由两个独立驱动轮,一个导向轮和平台体组成。两个同轴驱动轮分别由两电机独立驱动,利用两轮的转速差来实现转向的功能。其中,C为移动平台的质心;F为机械臂与平台的连接点;O为驱动轮与平台轴线的交点;2b为两驱动轮的距离;L1、L2分别为机械臂的两个杆长;r为驱动轮半径;La为C与F之间的距离;d为O与C的距离;φ为方向角;移动平台在F点与驱动轮转速相关的运动方程为:

根据式(1),推导出焊枪末端速度方程为:

由式(1)和式(2)可得到移动焊接机器人的前向微分运动学方程为:

可进一步表示为以下形式:

2 系统动力学模型
受到非完整约束的轮式移动焊接机器人的动力学模型用拉格朗日动力学方法表示为:

非完整约束表示为:

根据文献[19],对移动焊接机器人提出以下几种约束,第1种约束限制移动焊接机器人的速度方向仅仅沿着轮子滚动的方向,垂直于滚动方向的速度必须为零,约束方程为:


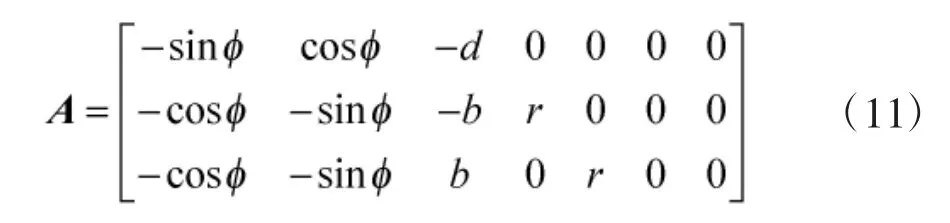
联立式(5)~式(8),可解出约束矩阵为:





式(6)两边同时乘以 ST,联立式(12),式(13),式(16),式(7),焊接机器人的动力学模型可表示为:

式(17)具有以下重要的特性:
性质3式(17)可以变换为以下线性化形式:



其中

3 自适应反演滑模控制器设计
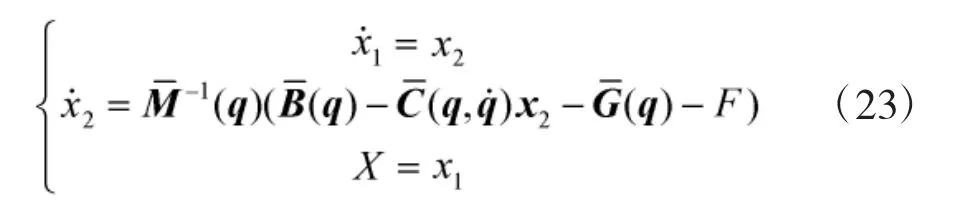
非完整轮式移动焊接机器人系统的数学模型可表示为以下形式:

假设外部干扰以及建模误差缓慢变化,则

令外部指令为Xd,则自适应反演滑模控制器的设计过程如下:
步骤1:定义位置跟踪误差为

则

定义移动焊接机器人系统的稳定系数为

其中,c1为正常数。
在进行控制器设计的时候,需要保证控制系统的稳定性,即移动焊接机器人的位置跟踪误差和速度跟踪误差均应收敛,且收敛到0,利用李亚普诺夫稳定判据对系统的稳定性进行判断。
定义速度误差

定义Lyapunov函数

则

在e2=0的情况下,1≤0,所设计的子系统是稳定的。
步骤2:由于

定义Lyapunov函数

其中,s为切换函数,定义切换函数为

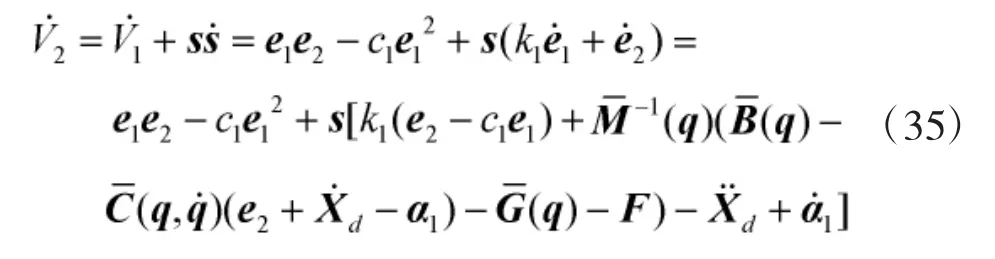
k1>0,则有

步骤3:实际控制过程中,由于参数不确定性及外部干扰无法获知,系统的总不确定性F难以确定,易造成抖振,可采用自适应方法对F进行估计。
定义Lyapunov函数



自适应反演滑模轨迹跟踪控制器设计如下:
自适应控制律设计为:

联立式(39)~ 式(41),得:

选取


由式(42),式(44)可得

由于

选取合适的 h,c1,k1的值,可使W 为正定矩阵,则3≤0成立,保证了系统的稳定性。
4 仿真结果及分析
为了验证所提出控制策略的有效性,利用计算机对设计的算法进行仿真验证,并与常规滑模控制的效果进行对比。
期望轨迹为:
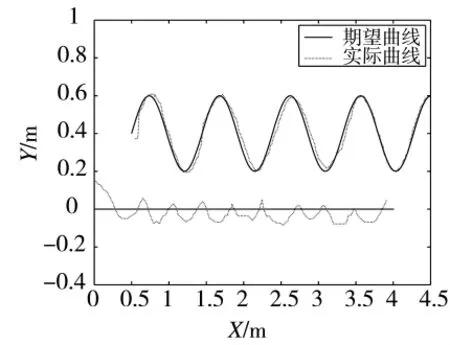
图2 常规滑模控制律的跟踪结果

图3 常规滑模控制律作用下xE的跟踪误差
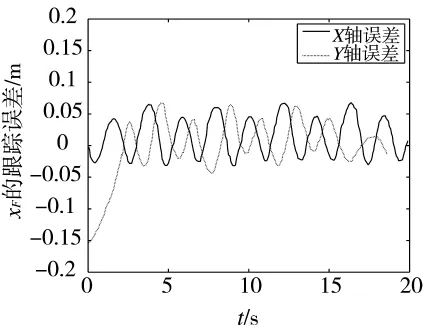
图4 常规滑模控制律作用下xF的跟踪误差
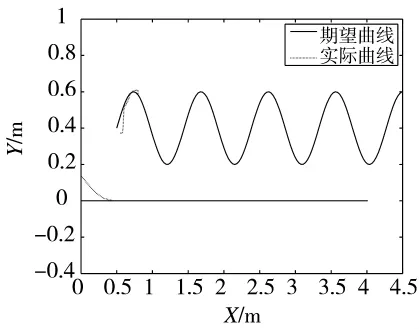
图5 自适应反演滑模控制律的跟踪结果
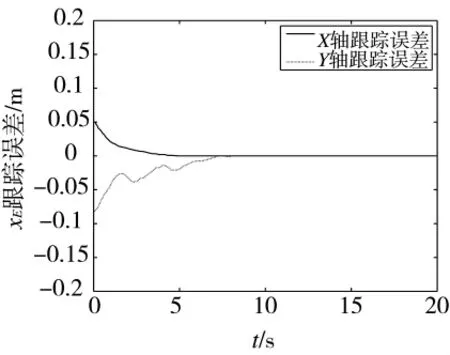
图6 自适应反演滑模控制律作用下xE的跟踪误差
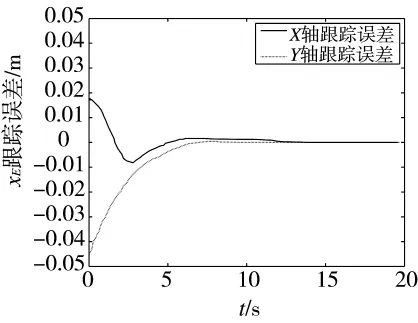
图7 自适应反演滑模控制律作用下xF的跟踪误差
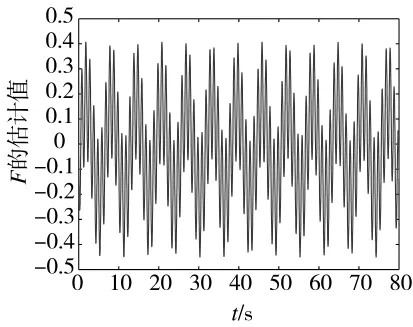
图8 的自适应变化过程
由以上仿真结果可以看出,由于总体不确定性上界未知,移动焊接机器人系统在常规滑模控制律的作用下对期望轨迹的跟踪效果不佳,且跟踪误差无法收敛。在自适应反演滑模控制律的作用下,系统对期望轨迹表现出了较好的跟踪效果,跟踪误差能迅速收敛,说明本文所提出的控制策略对系统中的不确定性有很强的鲁棒性,可实现复杂环境下对期望轨迹的跟踪控制,与常规滑模控制律相比具有突出的优势。
5 结论
移动焊接机器人工作环境复杂,易受到参数摄动和外部扰动的影响,常规控制方法难以完成高精度的轨迹跟踪控制任务。文中基于移动焊接机器人的运动学和动力学模型,根据Lyapunov稳定性理论提出了一种自适应反演滑模控制策略,使系统在参数摄动和外部扰动存在的情况下依旧能精确跟踪期望轨迹,且跟踪误差在较短时间内收敛,通过自适应算法对总不确定性进行估计,能大幅减弱系统的抖振。通过与常规滑模控制算法的仿真对比可看出,新型控制策略的跟踪控制效果稳定可靠,具有较大的工程应用价值。
