基于终端速度约束的助推-滑翔飞行器滑翔弹道设计方法
2018-08-16卜奎晨赵长见许泽宇
卜奎晨,赵长见,赵 洪,高 峰,许泽宇
(中国运载火箭技术研究院,北京,100076)
0 引 言
助推-滑翔飞行器采用火箭助推,利用滑翔体良好的气动外形,在大气层内超高速飞行,可实现全球快速打击。由于其滑翔飞行弹道位于临近空间,具有较强的机动能力和突防能力,是近年来世界主要军事大国的研究热点。但其助推-滑翔飞行器飞行弹道低、速度快,飞行环境恶劣,导致弹道、控制设计难度较大。
中国在助推-滑翔飞行器领域研究取得了较多的研究成果。在弹道设计方面,雍恩米等[1]针对助推-滑翔式导弹自由飞行段、稠密大气和稀薄大气之间弹道、滑翔弹道的射程近似解开展研究,为射程和峰值热流等特征参数估算提供了依据;杨铮等[2]采用序列二次规划法(Sequential Quadratic Programming,SQP)完成助推-滑翔导弹助推段弹道优化,为获得滑翔段起始点最大动能和实现弹道顺利衔接提供了解决方案;徐申达等[3]针对再入大气层后带动力的跳跃式飞行弹道进行了研究,针对发动机点火次数、点火高度及推力大小的影响开展了分析,得到有益的结果;李瑜等[4]针对SANGER再入-跳跃式弹道[5]、助推-滑翔-弹跳式弹道进行了对比分析,表明再入-跳跃式弹道对提高射程能力更为有利,但会极大提高驻点热流峰值,对热防护不利,而助推-滑翔-弹跳式弹道射程较优,且驻点热流峰值满足约束要求。
目前,中国学者针对助推-滑翔式导弹弹道模式及弹道优化设计方面进行了广泛而深入的研究,但在弹道设计上多是采用优化方法(如SQP等)给出寻优结果,缺乏对鲁棒性较好的滑翔段弹道设计方法进行研究。在实际工程应用中,由于飞行器本身质量特性、发动机性能及气动参数等存在偏差,以及飞行过程中大气干扰的存在,在一定程度上造成滑翔起始点存在位置、速度偏差。此外,实际飞行弹道偏离理想弹道将会导致落地速度存在偏差,需要开展落地速度控制方法研究,从而满足对目标的打击需要。
目前对于无动力滑翔式飞行器的终端位置控制具有较为成熟的方法,而对于速度控制的方法较少。滑翔弹道一般有平衡滑翔和跳跃滑翔两种方式,为研究问题方便,本文针对平衡滑翔弹道,即钱学森式[6]助推滑翔弹道(见图 1)进行研究,给出基于终端速度约束的滑翔弹道设计方法,该方法具有一定鲁棒性,为实现偏差情况下的滑翔弹道和终端速度控制联合设计提供了工具。

图1 “钱学森式”助推滑翔弹道Fig.1 TSIEN H.S.-trajectory for Boost-glide Vehicle
1 滑翔射程及滑翔终端速度计算
对于在大气层内飞行的滑翔式飞行器而言,滑翔飞行弹道影响滑翔终端速度,由于不同滑翔高度的气动阻力不同,在滑翔距离一定的情况下不同滑翔高度对应的滑翔终端速度也不同,二者是紧密耦合的关系。为了实现满足滑翔终端速度约束的滑翔弹道设计,需要解决滑翔射程和滑翔终端速度的快速工程计算问题。
1.1 平衡滑翔射程计算
为了开展平衡滑翔射程快速计算,进行如下简化假设[2]:
a)不考虑地球旋转,即eω=0;
c)滑翔式飞行器无侧滑,即β=0。
在滑翔式飞行器的滑翔轨迹平面内建立发射坐标系 O-xyz和速度坐标系见图2。
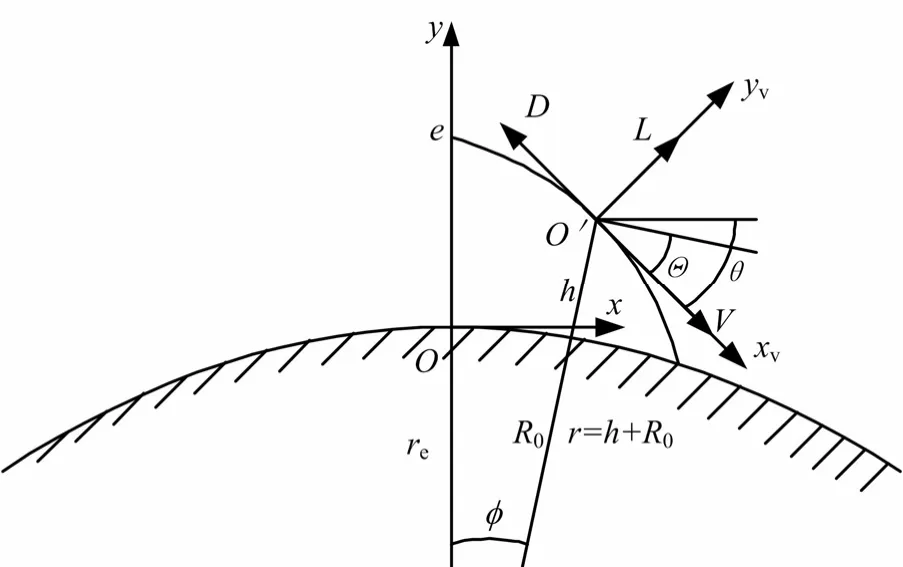
图2 滑翔飞行角度关系示意Fig.2 Angles Relationship of Gliding Flight
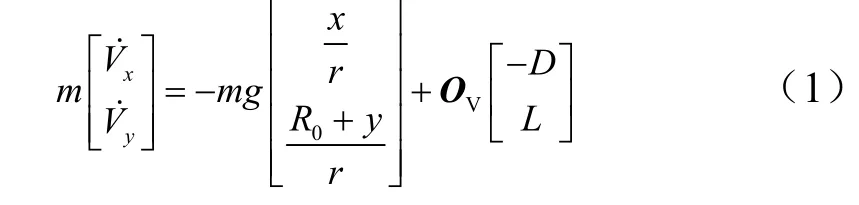
在发射坐标系-Oxyz建立运动方程:

由图2,有:

式中φ为er与r之间的夹角,称为射程角,其中,er为滑翔起点距地心的矢径。
将式(2)、式(3)代入式(1)可得:

进一步转换到速度坐标系,将式(4)两边同乘以矩阵VO的转置矩阵OV,整理得:
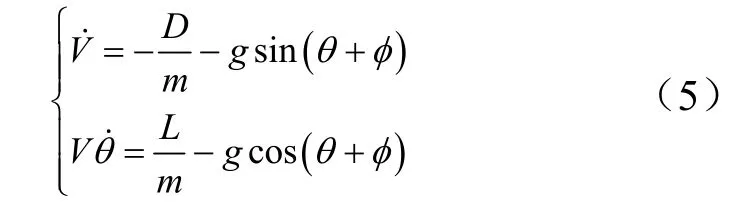
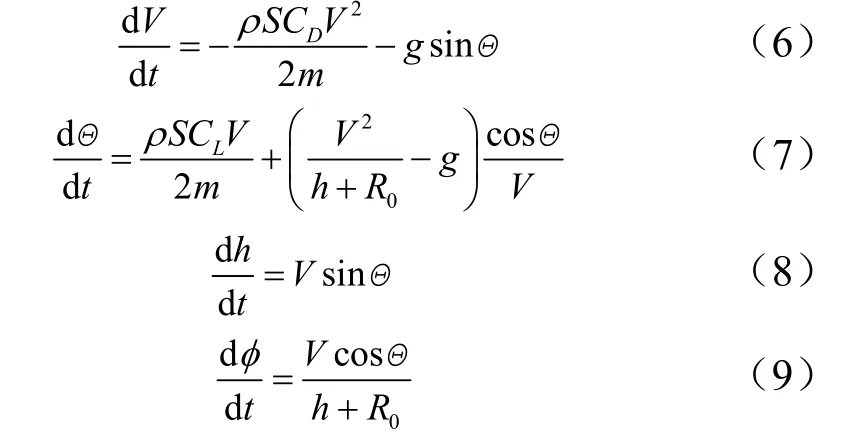
高超声速滑翔式飞行器滑翔距离一般在 1000 km以上,而滑翔段弹道高度变化范围基本在30 km以内,对于钱学森式弹道模式而言,当地弹道倾角及其变化率均很小,可认为0=Θ,0=˙Θ,则由式(9)除以式(6),可得射程角对速度的偏导数:


代入式(10),整理可得:


近似认为滑翔弹头在飞行时升阻比K和滑翔高度h保持不变,设0V和0h分别为滑翔起始点的速度和高度,由0=˙Θ知0hh= ,经积分,得到平衡滑翔状态下射程角φ的解析计算公式:

从而可以得到平衡滑翔距离公式为

以 HTV-2[7]为例进行平衡滑翔距离公式验证,弹道仿真结果与采用式(15)进行工程计算结果的对比情况如表1所示。
表1 平衡滑翔距离公式验证Tab.1 Validation of Equilibrium Glide’s Range Formula
从表1可以看出,平衡滑翔距离公式具有较好的计算精度,对于射程1000 km以上导弹的滑翔距离计算误差小于5%。
1.2 终端速度计算公式
将式(15)进一步转化,则有:

式(16)建立了滑翔终端速度与滑翔距离、滑翔高度的计算关系,已知滑翔飞行器当前高度、速度,即可计算出滑翔SL后的滑翔终端速度。
2 平衡滑翔弹道设计

由于大气密度ρ、重力加速度g是高度h的函数,速度V是马赫数Ma和高度h的函数,升力系数CL是马赫数Ma和攻角的函数,则由当前马赫数Ma和攻角即可解算出平衡机动高度指令,从而实现机动弹道设计。
平衡机动高度指令与马赫数和攻角的变化示意如图3所示。

图3 平衡机动高度指令示意Fig.3 Sketch Map of Equilibrium Glide’s Height Instruction
由图3可知,平衡滑翔弹道每一时刻升力和重力保持平衡,但由于不同飞行攻角对应的平衡滑翔弹道高度不同,滑翔同样射程后的速度损失也不同,利用这一特点可以开展终端速度控制与滑翔弹道联合设计。
3 基于终端速度约束的滑翔弹道设计
3.1 设计思路
利用不同滑翔高度气动阻力不同,滑翔距离一定情况下其滑翔终端速度也不同的特点,开展滑翔弹道和滑翔终端速度控制联合设计。利用弹上导航装置测量得到当前飞行速度,采用工程计算方法可以估计出一定滑翔距离后的滑翔终端速度,根据滑翔终端速度与标称速度之间的差异,进行当前弹道飞行高度的调节,通过增加或者降低气动阻力,实现对滑翔终端速度的调节。
3.2 设计方法
动态规划原理表明,过程中每一个节点达到最优即可实现全程的最优。借鉴该原理,在整个滑翔过程中实时进行滑翔终端速度控制。如图4所示,根据滑翔过程中当前速度、高度和飞行攻角,利用式(16)估算出滑翔终点速度,通过实时调节滑翔高度,实现对滑翔终端速度的控制。

图4 滑翔速度调节示意Fig.4 Sketch Map of Equilibrium Glide’s Velocity Adjustment
滑翔式飞行器在滑翔段根据高度指令形成过载指令进行导引飞行,其制导律为

式中cyN为过载指令;pK,dK为制导参数;h为导弹实时高度;ch为高度指令;h˙,ch˙为导弹实时高度和高度指令的时间导数。
速度调节最终需要落实到飞行高度的调节上,高度调节策略如下:
a)根据当前高度h0计算出平衡攻角αp和升阻比结合当前速度 V0和剩余滑翔射程 SL,根据式(16)计算出滑翔终端速度V,并与理想速度 VC对比,如果速度偏差满足要求(比如ΔV≤10 m/s),则不进行速度调节,反之则需要进行速度调节。
b)当速度偏差为正时需要进行减速调节。当平衡攻角pα小于最大升阻比攻角optα时,需要压低弹道;当平衡攻角pα大于最大升阻比攻角optα时,需要抬高弹道。给出高度变化量hΔ,使得在新的平衡高度和升阻比K1条件下的滑翔终端速度偏差ΔV满足要求,从而得到用于减速调节的平衡滑翔高度指令
c)当速度偏差为负时需要进行增速调节。当平衡攻角pα小于最大升阻比攻角optα时,需要抬高弹道;当平衡攻角pα大于最大升阻比攻角optα时,需要压低弹道。给出高度变化量hΔ,使得在新的平衡高度和升阻比K1条件下的滑翔终端速度偏差ΔV满足要求,从而得到用于增速调节的平衡滑翔高度指令
4 仿真算例
以滑翔射程2700 km、滑翔终端速度1500 m/s为约束,分别针对滑翔初始高度±1 km、滑翔初始速度±100 m/s、气动升力+20%、气动阻力-20%等拉偏情况,取终端速度控制偏差VΔ≤10 m/s,进行滑翔弹道和滑翔终端速度控制联合设计方法仿真验证,仿真结果如图5所示。
图5 偏差情况下滑翔弹道设计及终端速度控制曲线Fig.5 Gliding Trajectory Design and Terminal Velocity Control Effect when Errors Exist

续图5
从图5可看出,采用本文的联合设计方法,各种拉偏情况下终端速度控制情况良好,速度偏差在1 m/s范围之内。对于不同初始偏差,实时规划弹道存在不同的规律。起滑高度拉偏情况下,实时规划弹道初期采用小幅波动实现对终端速度的控制,最终基本与标称弹道吻合;起滑速度和气动系数拉偏情况下,为了抵消初始速度偏差及全程气动系数偏差带来的额外能量影响,需要全程抬高或压低弹道实现对终端速度的控制,拉偏弹道相比标称弹道存在小量的偏离(不大于4 km)。
可见,本文终端速度控制与滑翔弹道联合设计方法具有较好的应用效果,所设计的滑翔弹道平稳且具有良好的终端速度控制能力,对初始位置、速度偏差及气动偏差等具有较好的适应性,鲁棒性较强,具有较强的工程应用价值。
5 结束语
本文通过理论建模和推导,给出滑翔射程和滑翔终端速度计算公式,具有较高的计算精度。提出一种易于实现的滑翔终端速度控制方法,该控制方法采用高度指令调节策略,为实现滑翔弹道与滑翔终端速度控制联合设计提供了基础。仿真验证表明该方法可行、有效,鲁棒性较好,具有较强的工程应用价值。
