城轨门系统接触参数实验获取方法研究
2018-08-13贡智兵王祖进
贡智兵,王祖进
城轨门系统接触参数实验获取方法研究
贡智兵,王祖进
(南京康尼股份有限公司,江苏 南京 210038)
在城轨门系统动力学仿真过程中需要对接触参数进行不断修正,以提高门系统仿真精度。为了使门系统仿真更精确、符合实际工况,设计了实验装置,对门系统中主要接触副的接触刚度和接触阻尼通过实验和仿真相结合的方法获取。获取接触参数后,在同类门系统仿真过程中不再需要对接触参数的值进行多次修正,提高了门系统仿真的精度。
城轨门系统;虚拟样机;实验装置;接触参数
0 引言
轨道车辆门系统[1]虚拟样机模型是一个复杂的多体动力学仿真模型,其中传动系统和导向系统中相对运动零部件间的接触对是影响建模精度的主要因素,而接触对本身的仿真精度主要由接触刚度和接触阻尼决定。
目前文献中对接触刚度的测量主要有两种测量方法:一种是直接法[2-3],就是直接测量接触面间的负载和位移,然后得到刚度;另一种方法是间接法[4-5],就是测量某个物理量,然后通过该物理量跟接触刚度之间的关系间接求得接触刚度,例如超声测量[6]和接触谐振测量[7]。接触阻尼的测量主要是采用间接测量法,也就是测量某个物理量,然后通过该物理量和接触阻尼之间的关系求得接触阻尼,例如对振动信号进行分析,提取谐振频率,通过谐振频率和阻尼间的对应关系得到接触阻尼值[8];又例如通过绘制“载荷-位移”曲线,即迟滞回线来表征接触阻尼特性[9-10]。
上述接触刚度直接测量法的缺点是只能测量接触刚度,无法测得接触阻尼;间接测量方法得到的接触刚度和接触阻尼值的精度取决于间接量的实验精度,后续数据推导过程中也会引入理想假设误差,最终得到的刚度和阻尼值的精度很难评估,而且实验测得到的刚度和阻尼值是用于仿真建模的,仿真中直接采用实验值很难得到高精度的模型。此外,上述方法测量的接触对象都是平板类零件和球形零件,不适用于丝杆螺旋传动等特殊类型接触。
因此,本文对接触刚度和接触阻尼进行直接测量,通过实验和仿真相结合的方法得到接触刚度值和接触阻尼值。
1 实验装置
对门系统中的接触副进行定义,具体包括:锁闭组件和丝杆间的接触、尼龙滚轮和上滑道间的接触、摆臂滚轮和下导轨间的接触。
为了获取锁闭组件和丝杆间的接触参数、摆臂滚轮和下导轨间的接触参数、尼龙滚轮和上滑道间的接触参数,设计了下图所示的接触参数获取实验装置。锁闭组件和丝杆间的接触参数实验装置包括:丝杆、锁闭组件、重物块、直线轴承、长导柱、运动滑块、尼龙绳、微动开关、计时装置等。滚轮和导轨间接触参数实验装置包括:滑筒组件、携门架、机架、挂架、上滑道、下导轨、长导柱、尼龙绳、重物块、微动开关、计时装置等。

图1 锁闭组件和丝杆间接触参数实验装置

图2 滚轮和导轨间接触参数实验装置
2 实验原理
使用重物块通过钢丝绳拉动锁闭组件在丝杆上做直线运动,测量锁闭组件从丝杆的一端运动到另一端的时间间隔。然后在RecurDyn软件中建立相同的动力学仿真模型[11-14],丝杆和锁闭组件间建立接触对。
使用重物块通过钢丝绳拉动滑筒在长导柱上做直线运动,通过配重块对挂架施加的拉力来增大滚轮和导轨间的正压力,测量滑筒从长导柱的一端运动到另一端的时间间隔。然后在RecurDyn软件中建立相同的动力学仿真模型,滚轮和导轨间建立接触对。
通过调整接触参数,实现仿真模型的运动时间间隔和实际物理样机的运动时间间隔相等,从而得到丝杆和锁闭组件间接触对的参数、滚轮和导轨间接触对的参数。改变重物块的重量对接触参数进行验证,根据验证结果对接触参数进行微调,最终得到接近实际接触效果的参数组合。
3 物理实验
实验1,标定长导柱和运动滑块间的摩擦系数。断开锁闭组件与运动滑块间的连接,让重物块仅拉着运动滑块沿长导柱运动,测量运动时间间隔。分2种工况进行,工况1:重物块为2.5N,滑块运动10次,记录运动时间间隔;工况2:重物块为5N,滑块运动10次,记录运动时间间隔。实验数据如表1所示。
表1 实验1(运动时间间隔,单位:ms)
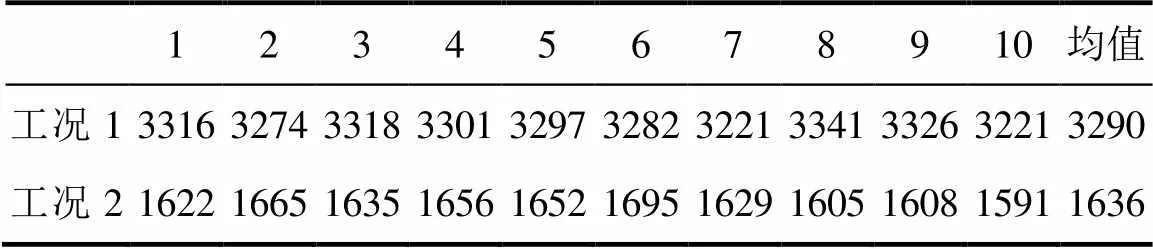
Tab.1 Experiment 1 (motion time interval, unit: ms)
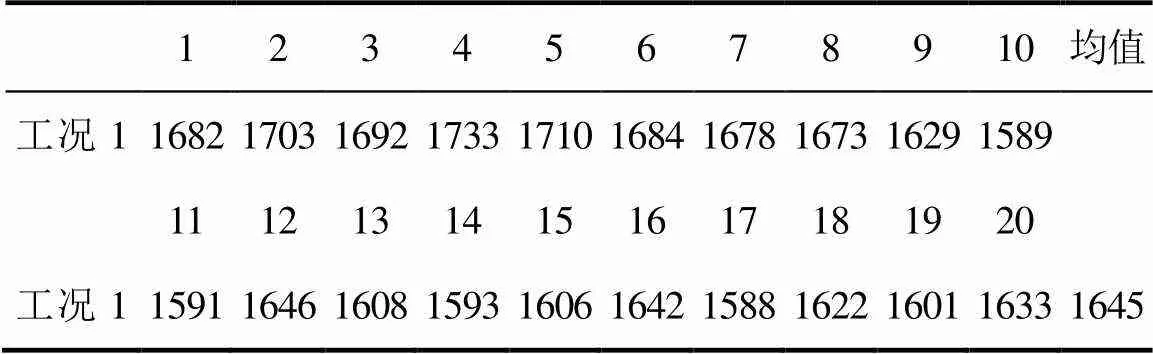
实验2,获取塑料螺母和丝杆间的接触参数。锁闭组件中仅塑料螺母与丝杆接触,让重物块拉着运动滑块沿长导柱运动,测量运动时间间隔。分2种工况进行,工况1:重物块为10N,滑块运动20次,记录运动时间间隔;工况2:重物块为12.5N,滑块运动20次,记录运动时间间隔。实验数据如表2所示。
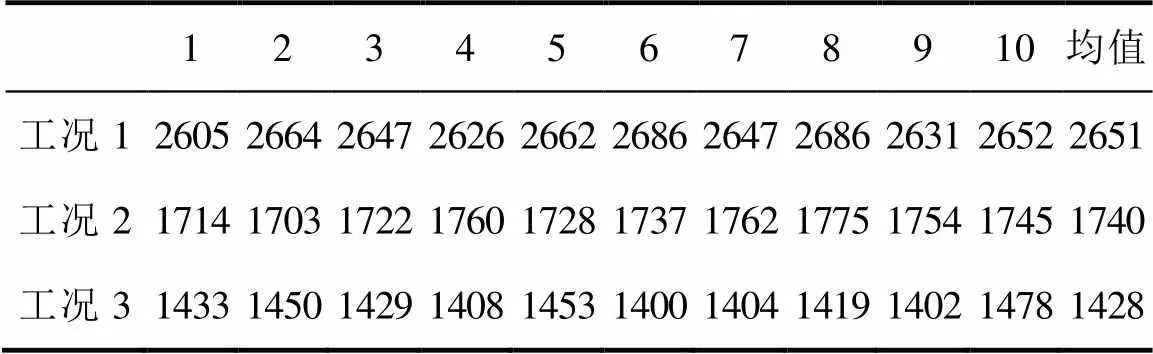
实验3,获取滚动销和丝杆间的接触参数。锁闭组件中仅滚动销和铜套与丝杆接触,让重物块拉着运动滑块沿长导柱运动,测量运动时间间隔。分3种工况进行,工况1:重物块为10N,滑块运动20次,记录运动时间间隔;工况2:重物块为12.5N,滑块运动20次,记录运动时间间隔;工况3:重物块为15N,滑块运动20次,记录运动时间间隔。实验数据如表3所示。
表2 实验2(运动时间间隔,单位:ms)

Tab.2 Experiment 2 (motion time interval, unit: ms)
表3 实验3(运动时间间隔,单位:ms)

Tab.3 Experiment 3 (motion time interval, unit: ms)
实验4,验证锁闭组件和丝杆间的接触参数。锁闭组件与丝杆接触,让重物块拉着运动滑块沿长导柱运动,重物块为40N,滑块运动20次,记录运动时间间隔。实验数据如表4所示。
表4 实验4(运动时间间隔,单位:ms)
Tab.4 Experiment 4 (motion time interval, unit: ms)
实验5,获取下导轨和摆臂滚轮间的接触参数。实验装置中共有两个接触对,均为下导轨和摆臂滚轮间的接触。让重物块拉着滑筒沿长导柱运动,测量运动时间间隔。分3种工况进行,工况1:两个配重块分别为20N,重物块为5N,滑筒运动10次,记录运动时间间隔;工况2:两个配重块分别为20N,重物块为5N,滑筒运动10次,记录运动时间间隔;工况3:两个配重块分别为20N,重物块为10N,滑筒运动10次,记录运动时间间隔。实验数据如表5所示。
表5 实验5(运动时间间隔,单位:ms)
Tab.5 Experiment 5 (motion time interval, unit: ms)
实验6,获取上滑道和尼龙滚轮间的接触参数。实验装置中共有两个接触对,一个为下导轨和摆臂滚轮间的接触,另一个为上滑道和尼龙滚轮间的接触。让重物块拉着滑筒沿长导柱运动,测量运动时间间隔。分4种工况进行,工况1:两个配重块分别为20N,重物块为5N,滑筒运动5次,记录运动时间间隔;工况2:两个配重块分别为20N,重物块为10N,滑筒运动5次,记录运动时间间隔;工况3:两个配重块分别为10N,重物块为5N,滑筒运动10次,记录运动时间间隔;工况4:两个配重块分别为10N,重物块为7.5N,滑筒运动10次,记录运动时间间隔。实验数据如表6所示。
表6 实验6(运动时间间隔,单位:ms)

Tab.6 Experiment 6 (motion time interval, unit: ms)
4 仿真实验
根据实验1的实验数据,对仿真模型(图3)进行调试和验证,得到运动滑块与长导柱间的摩擦系数为0.0204。
根据实验2的实验数据,对仿真模型(图4)进行调试和验证,得到塑料螺母与丝杆间的接触参数。
根据实验3的实验数据,对仿真模型(图5)进行调试和验证,得到滚动销与丝杆间的接触参数以及铜套与丝杆间的接触参数。
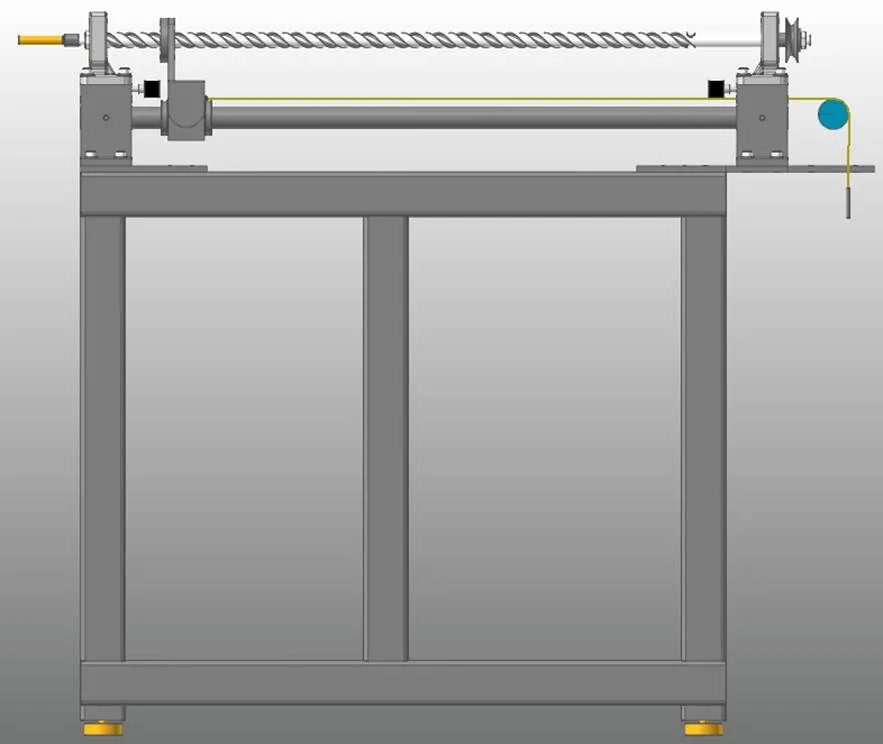
图3 仿真模型1

图4 仿真模型2

图5 仿真模型3
根据实验4的实验数据,对仿真模型(图6)进行调试和验证,对锁闭组件与丝杆间的接触 参数进行验证,并根据验证结果对接触参数进行 修正。
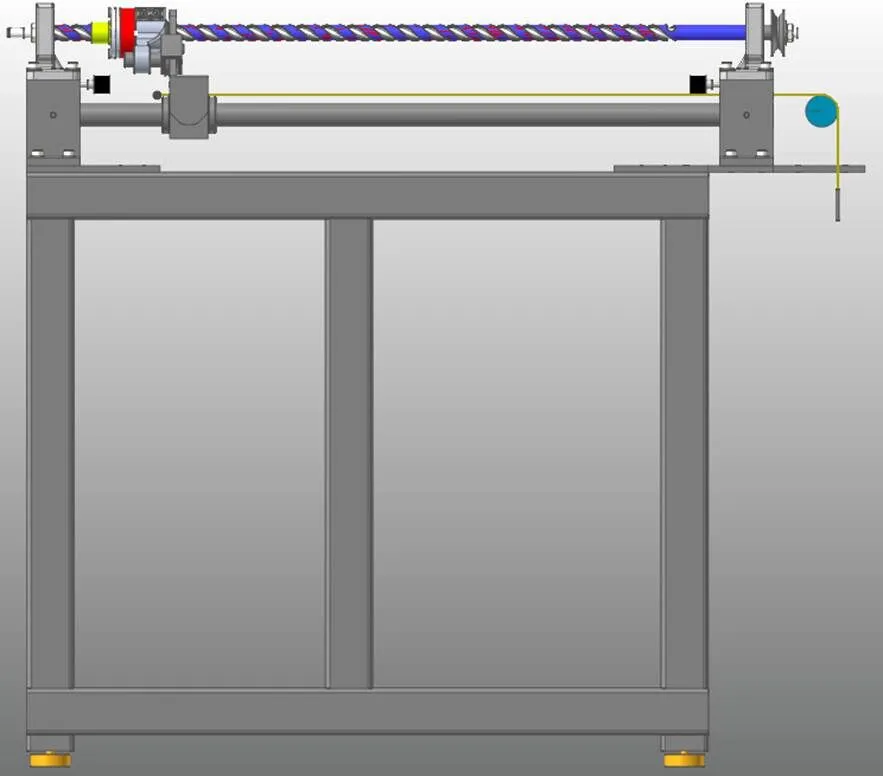
图6 仿真模型4
根据实验5的实验数据,对仿真模型(图7)进行调试和验证,得到下导轨和摆臂滚轮间的接触参数。

图7 仿真模型5
根据实验6的实验数据,对仿真模型(图8)进行调试和验证,得到上滑道和尼龙滚轮间的接触参数。
5 实验结果
根据上述接触实验结果,对接触参数进行设置,如表7所示,其中K为接触刚度、C为接触阻尼、ud为动摩擦系数、us为静摩擦系数、d为最大穿透深度、e为刚度指数。
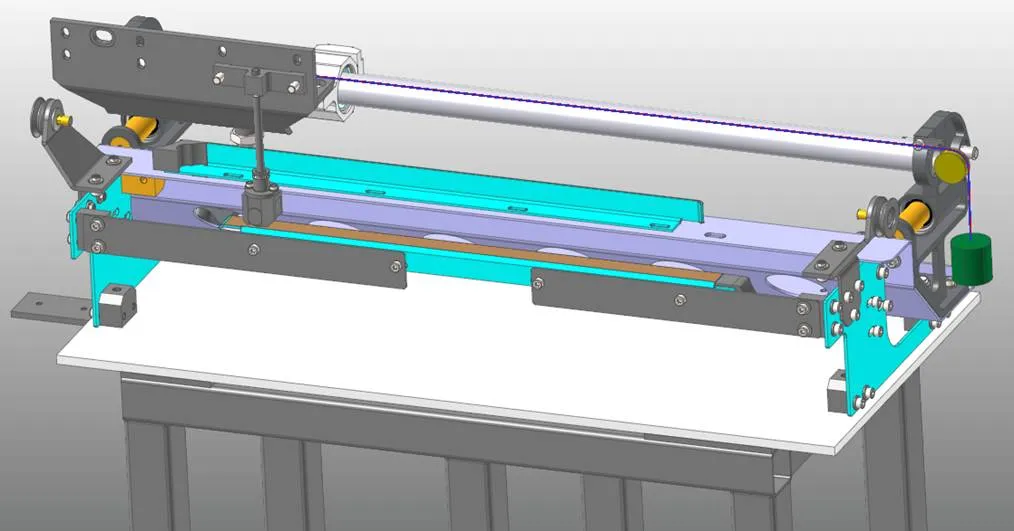
图8 仿真模型6
6 结论
基于实验与仿真相结合的测量方法,对门系统中主要接触副的接触刚度和接触阻尼进行了实验测量和仿真分析,实验装置和门系统的接触形式相同,不需要数据推导,能够对螺旋传动等特殊类型的接触进行测量,在获取接触参数的同时也能够对接触参数的实验值进行仿真验证,在门系统仿真模型中不再需要对接触参数的值进行修正,为建立高精度的门系统仿真模型提供了基础。
表7 接触副参数设置

Tab.7 Contact pair parameters setting
[1] 曾世文. 城市轨道车辆塞拉门关门性能研究[D]. 南京理工大学, 2011.
[2] 洪军, 蒋祥俊, 张进华, 等. 一种测量机械结合面法向及切向接触刚度的综合实验台: 中国, 201410131098 [P]. 2014-07-09.
[3] 郭铁能, 郝宇, 蔡力钢,等. 一种测试螺栓结合面接触阻尼特性的方法: 中国, 201310309104 [P]. 2013-11-13.
[4] 石远豪. 结合面接触阻尼和接触刚度的实验检测研究[D]. 广东工业大学, 2016.
[5] 李小彭, 郭强, 李加胜,等. 结合面法向接触刚度分形预估模型及其仿真研究[J]. 中国工程机械学报, 2016, 14(4): 281-287.
[6] 洪军, 杜飞, 李宝童,等. 一种接触刚度的高精度超声检测方法: 中国, 103616436B [P]. 2016-01-13.
[7] 孙星星. 超声原子力显微镜的微观力学性能仿真研究[D]. 安徽工程大学, 2015.
[8] 刘文威. 基于分形理论的机械结合部接触特性参数研究[D]. 华中科技大学, 2016.
[9] 徐超, 李东武, 陈学前,等. 考虑法向载荷变化的微滑摩擦系统振动分析[J]. 振动与冲击, 2017, 36(13): 122-127.
[10] 王玉柱, 刘婷婷. 基于双目视觉的钢轨磨耗测量技术研究[J]. 软件, 2017, 38(3): 113-117.
[11] 徐国英, 王闯, 姚希民, 等. 基于RecurDyn软件坦克悬挂系统动力学仿真[J]. 机械研究与应用, 2015, 28(3): 43-45.
[12] 郭彬,唐军,黄武新,等. 基于RecurDyn的步进链传动系统的机电联合建模与仿真[J]. 机械传动, 2015, 39(11): 110-114.
[13] 王亚东, 王祖进. 城轨塞拉门虚拟样机建立方法研究[J]. 软件, 2017, 38(12): 291-295.
[14] 王祖进, 史翔, 贡智兵, 等. 城轨塞拉门控制系统虚拟样机建立方法研究[J]. 软件, 2018, 39(2): 143-146.
Study on Experimental Method for Obtaining the Contact Parameters of the City Track Door
GONG Zhi-bing, WANG Zu-jin
(Nanjing Kangni Mechanical & Electrical Co. Ltd., Nanjing 210038, China)
During the dynamic simulation of the city track door, the contact parameters need to be constantly revised to improve the accuracy of the door system simulation. In order to make the door system simulation more accurate and accord with the actual working conditions, an experimental device was designed. The contact stiffness and contact damping of the main contact pairs in the door system were obtained through a combination of experimental and simulation methods. After obtaining the contact parameters, it is no longer necessary to perform multiple corrections on the values of the contact parameters in the simulation process of the same door system, which improves the precision of the door system simulation.
City track door; Virtual prototype; Experimental device; Contact parameters
TP391.9
A
10.3969/j.issn.1003-6970.2018.07.016
贡智兵(1980-),男,博士,工程师,主要研究方向:轨道车辆门系统;王祖进(1988-),男,博士,工程师,主要研究方向:轨道车辆门系统。
本文著录格式:贡智兵,王祖进. 城轨门系统接触参数实验获取方法研究[J]. 软件,2018,39(7):79-83
