基于Arduino机械臂的设计与实现
2018-08-11唐皓金亚玲沈阳工学院
唐皓 金亚玲* 沈阳工学院
引言:近几十年来,国内国外的机械臂行业发展尤为迅猛,它可以提高流水线产品品质,提高生产线的生产效率。大大改善了人们的劳动条件,对产品的更新换代也是起着不可或缺的作用。本文通过一些单片机方面的技术和工具,模拟实现生活中常用机械臂的功能,做出一个简易机械臂作为学习研究的工具。
1 Arduino开发板
Arduino开发板是一类便捷灵活,方便上手的开源电子硬件平台,包括一系列的硬件和软件。其原名Arduino是意大利语中男性的常用名,原意是强壮的朋友。而这类硬件产品正如它名字所描述的那样,十分强壮可靠。适用于工程师行业进行快速的产品研发,也为艺术家,设计师等一部分现代创客提供更为便捷的开发平台,它被广大创客所运用,生产了许多新式产品。
2 设计思想
本作品主题思想是设计一款基于Arduino平台,使用外部控制器控制舵机运行的机械臂。主板方面选择了Arduino中的uno型号。作为Arduino平台的经典型号,UNO的处理器核心是ATmega328,同时具有14路数字输入/输出口,其中6路可作为PWM输出,6路模拟输入,一个16MHz晶体振荡器,一个USB口,一个电源插座,一个ICSP header和一个复位按钮。机械臂材质采用了PVC材料,在轻便的同时也具有可塑性,可以在专业门店采购。利用舵机控制臂体,也方便了在后期使用过程中设备维护和更换。
3 主板的选择
Arduino,作为开源的平台,其简易性和可开发性深受广大硬件爱好的推崇。个人认为它的优点有以下几个:经过封装的函数和函数库,便于使用。开源的平台,更容易查找相关资料。使用范围广泛,可以和同行业人士交流学习。
Arduino基本透明掉了硬件部分,因此Arduino板集成了众多的端口方便使用者进行二次开发,其扩展口部分如图1所示。
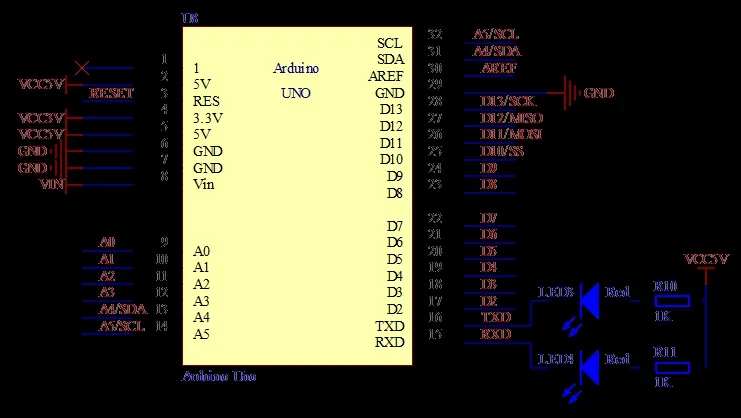
图1 主板扩展口示意图
4 机械臂操作实现
作为机械臂,其设计理念是让舵机接受摇杆信号进行运作,并根据信号变化调整角度。首先,我们需要设定开机时舵机的基础角度,这样的设计一则为了检测开机时舵机的工作性能,二则是直接预设角度,方便操作。在启动之后,通过摇杆,控制舵机,其大体流程如下图2所示。
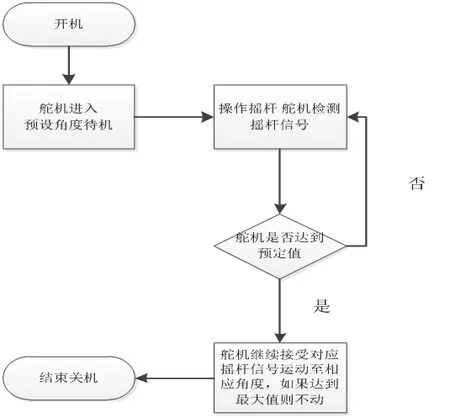
图2 机械臂的运作大体流程
总结:Arduino这一平台则提供了这些条件,几乎零基础的硬件条件,容纳了那些零经验新人,各种可视化的代码程序为编写代码提供便捷。相信以后Arduino也会迎来许许多多的粉丝。
