电动多旋翼植保无人机升力特性综合测评方法
2018-08-10何新刚周志艳罗锡文兰玉彬
臧 英,何新刚,周志艳,明 锐,臧 禹,罗锡文,兰玉彬
电动多旋翼植保无人机升力特性综合测评方法
臧 英,何新刚,周志艳※,明 锐,臧 禹,罗锡文,兰玉彬
(1. 华南农业大学工程学院/广东省农业航空应用工程技术研究中心,广州 510642;2. 国家精准农业航空施药技术国际联合研究中心,广州 510642;3. 华南农业大学南方农业机械与装备关键技术教育部重点实验室,广州 510642)
升力特性是电动多旋翼植保无人机性能测试的重要参数之一。为了实现对电动多旋翼植保无人机升力特性的性能检测,针对不同型号、不同规格的电动多旋翼植保无人机在评价过程中存在无统一的评价指标问题,该文提出了一种半系留式电动多旋翼植保无人机升力特性的测试与评价方法,包括性能检测平台、升力特性测试方法及指标、升力特性的评价方法。为了验证方法的可行性,对3种不同机型(分别为四旋翼机型Ⅰ、六旋翼机型Ⅱ、八旋翼机型Ⅲ)进行了升力特性指标的性能测试试验。试验结果表明:3种机型在功率载荷、重量效率、热效比等方面有较大差异,功率载荷最好的机型Ⅲ比最差的机型Ⅰ大7.6 mN/W,重量效率最好的机型Ⅰ比最差的机型Ⅱ大0.33,热效比最好的机型Ⅲ比最差的机型Ⅱ大10.5 N/℃,反映出3种机型在设计过程中整个动力系统效率、机型整体结构和材料选择上的差异,从而在整机作业性能上表现出差异。在上述指标测试的基础上,结合无人机动力系统数学模型,提出了运用功率载荷、重量效率和热效比进行电动多旋翼植保无人机升力特性综合评价的评分方法,对上述3种机型进行综合评分的结果为:机型Ⅲ>机型Ⅰ>机型Ⅱ,该结果表明所提出的评价方法能有效对不同类型电动多旋翼植保无人机的升力特性进行综合评判。该文所给出的测试与评价方法,不仅能用于电动多旋翼植保无人机性能的评测,还能为机型性能的进一步改进提供参考。
无人机;模型;农业机械;电池动力;升力特性;功率载荷;重量效率;热效比
0 引 言
近年来,农业航空快速发展,电动多旋翼植保无人机(简称多旋翼无人机)由于具有可垂直起降、空中悬停、操作维护简便等优点,在植保作业中受到热捧[1]。但是由于其气动效率低等原因,目前存在载质量小,续航时间短等问题[2],仍需要大力优化改进。
升力特性是多旋翼无人机的重要飞行性能参数之一,在植保作业过程中,多旋翼无人机升力特性的优劣直接影响到作业的效率和作业质量[3]。如何在同等能耗的条件下,提高多旋翼无人机的升力特性,增加有效载荷量,是进行多旋翼无人机性能评测和优化设计的重要内容。
多旋翼无人机升空飞行的首要条件是动力,有了动力才能驱动螺旋桨旋转,产生克服重力所必须的升力,所以升力特性的研究离不开对动力系统的研究[4-6]。
国内外关于多旋翼无人机动力系统的测试评价已有一些研究,但主要集中在能源消耗率和重量效率等评价指标上[7]。能源消耗率是衡量动力系统经济性的主要指标之一,其体现了动力系统的机械效率。谷新宇等[8]针对微小型无人机动力系统设计了一套自动测试系统,可对无刷电机的效率进行了测试,给出电机的效率高低的指示;Youngren等[9]提出了螺旋桨效率的测试方法,可逐个进行螺旋桨的单独测试;王刚等[10]开发了螺旋桨与无刷电机效率匹配的测试系统,可高效地进行动力系统的匹配和优化,提高动力系统的效率;郑欣等[11]提出了无人机的动力效率测试方法,可进行电机和螺旋桨的最佳匹配效率研究;Liebold等[12]引入功率载荷作为多旋翼无人机动力系统测试的评价指标,能够通过功率载荷提高多旋翼无人机的效率。王东等[13]设计了一种多旋翼无人机功率载荷测试装置,对拉力与功耗关系进行了测试,但没有对不同机型的功率载荷进行对比评价。王爱明等[14]设计了一种直线电机重量效率测试系统,应用重量效率评价直线电机的动态性能。
上述文献的报道主要是动力系统中单个部件的测试,包括电机效率的测试、螺旋桨效率的测试、螺旋桨与电机匹配效率的测试等,但针对多旋翼无人机整机升力特性的测试鲜见。如何综合评价各类无人机的升力特性,对无人机性能做出优劣比较判断,目前尚无标准可依。只有明确了表述升力特性的评价指标,对测试方法和评价标准进行统一规范,才能对多旋翼无人机升力特性的优劣进行评判,并给出优化改进的建议。本文拟引入功率载荷、重量效率和热效比作为升力特性的评价指标,为多旋翼无人机的性能评测和优化改进提供参考。
1 材料和方法
1.1 测试系统
综合考虑测试系统功能和可靠性要求,搭建了半系留式多旋翼无人机性能测试平台,测试系统由硬件设施、传感器组和数据采集软件等组成。半系留多旋翼无人机性能测试平台有别于传统的将多旋翼无人机固定于测试平台的测试方法,通过柔性绳索对被测多旋翼无人机进行适当限位,让被测试多旋翼无人机在竖直方向限高范围内上下运动,柔性绳索弹性范围内进行有限的俯仰、横滚等姿态动作,能够模拟真实的飞行过程。其中硬件设施由限位装置和减震装置组成,限位装置能够对不同型号和不同规格的多旋翼无人机进行限位,保证多旋翼无人机在安全范围内进行测试。减震装置用于保证多旋翼无人机进行极限测试时不受损伤。直流电源提供无人机当前的电流和电压,拉力传感器用于提供多旋翼无人机当前的有效拉力,红外热像仪采集当前条件下多旋翼无人机的电机温度数据。基于LabVIEW的数据采集软件是整个测试系统的核心,能够实时同步采集拉力传感器和直流电源的数据,并通过网络上传至计算机进行实时处理,生成报告。半系留式多旋翼无人机性能测试平台如图1所示,主要传感器及设备性能指标如表1所示。

1. 多旋翼无人机 2. 限位钢丝绳 3. 上阻尼减震器 4. 红外热像仪 5. 限位吊码 6. 滑块 7. 滑轨 8. 锁扣 9. 便携式笔记本 10. 直流电源 11. 桁架 12. 导轨 13. 卷线器 14. 拉力传感器 15. 滑块 16. 限位吊码 17. 下阻尼减震器18. 台架
1.2 测试用机型
本文对3种机型进行了测试。机型主要性能参数如表2所示。
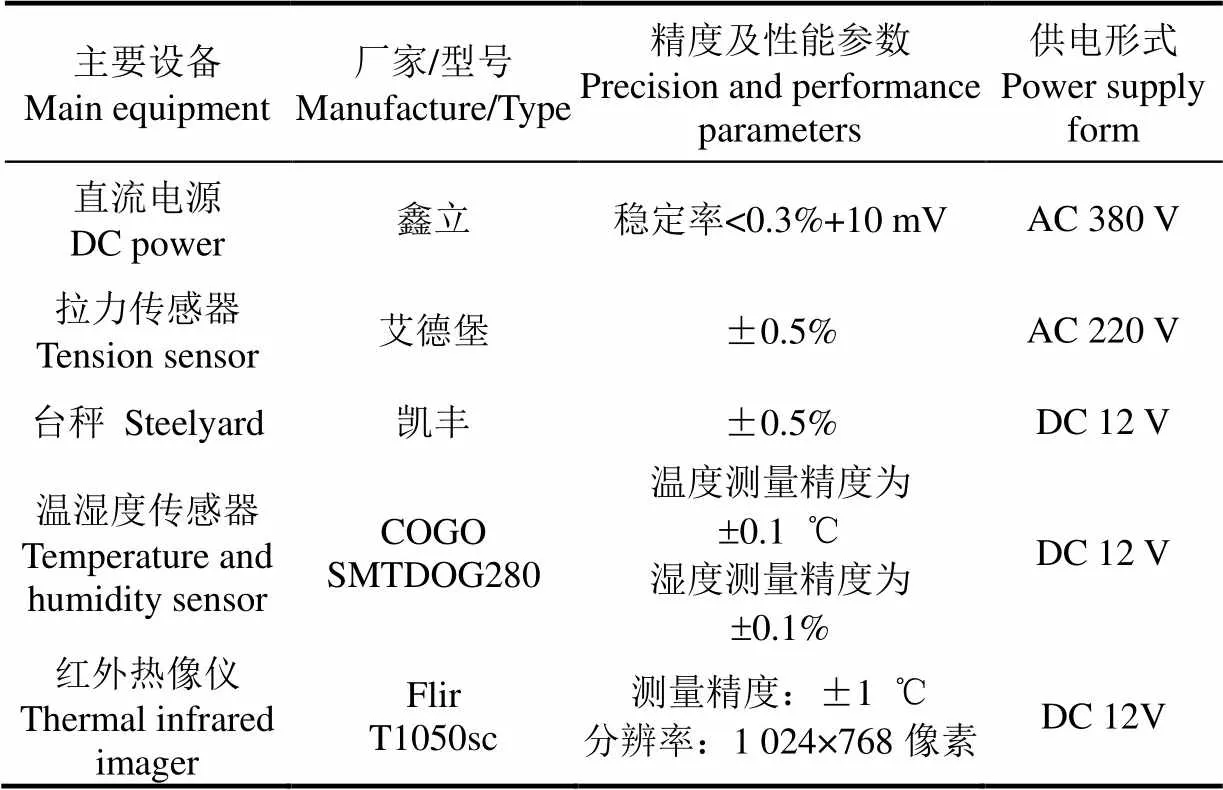
表1 主要传感器及设备性能指标
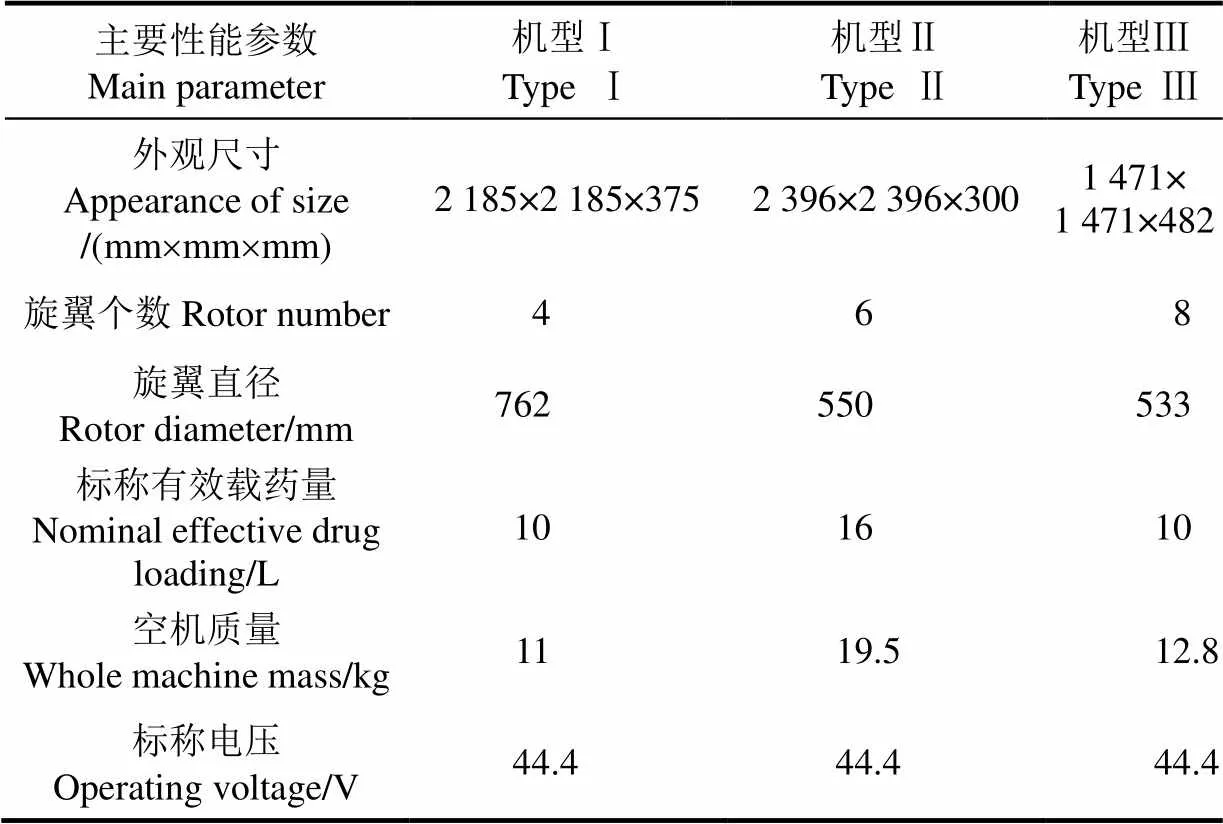
表2 多旋翼无人机主要性能指标
1.3 评价指标及方法
电动多旋翼植保无人机的动力系统由电池、电机和调速器以及螺旋桨组成[15-16]。动力系统由高能动力电池驱动[17-18];电调根据控制信号改变输出电流,控制电机的转速,实现飞机的姿态控制;所采用的电机通常为永磁无刷直流电机[19-21];螺旋桨将轴功率转为升力,通过改变不同轴的升力,来实现飞机的运动状态控制。电动多旋翼植保无人机动力系统的原理如图2所示。结合电动多旋翼植保无人机动力系统的特点,本文采用功率载荷、重量效率、热效比3个指标来进行其升力特性的性能评测。

图2 多旋翼无人机动力系统的原理图
1.3.1 功率载荷
综观多旋翼无人机作业的全过程,可以看出,机身结构越复杂,有效载荷越大则需要消耗的电能越多;作业过程中多旋翼无人机的有效载荷与机身的结构决定了其耗电量。有些机型虽然有效载荷大,但是其能耗也比较大,所以在实际作业过程中滞空作业时间相对较少;因此,本文引入功率载荷作为多旋翼无人机升力特性的效率评判指标。功率载荷是单位功率下无人机的升力,反映无人机的效率,功率载荷越大表示效率越高。通过测定无人机升力、电流和电压,来评价其升力性能。功率载荷(power load)公式(1)为

式中为多旋翼无人机的功率载荷,N/W;∑为多旋翼无人机在某电压下的总升力,N;为无人机所消耗的功率,W。
本试验将多旋翼无人机视为一个质量为的质量块,当悬停在空中时,个螺旋桨对其产生的总升力∑如式(2)所示,其力学等效模型如图3所示。

式中为多旋翼无人机的空机重力,N;为拉力计的读数,N;F为动力电缆对无人机的拉力,N;F为拉力计等辅助设备自身的重力,N。
注:1、2、3、4表示单个螺旋桨的升力,N;表示多旋翼无人机的空机重力,N;表示拉力计读数,N;F表示动力电缆对无人机的拉力,N;F表示拉力计等辅助设备自身的重力,N。
Note:1,2,3and4are lift of a single propeller, N;is empty machine gravity of UAV, N;is tension indicator, N;Fis the cable’s pull on the UAV, N; Fis the gravity of the auxiliary device, N.
图3 力学等效模型
Fig.3 Mechanical equivalent model
由于测试过程中多旋翼无人机所飞行的高度发生变化,使动力电缆对多旋翼无人机的拉力F也相应会发生变化,其可以用该系统的积分方程(3)得出。
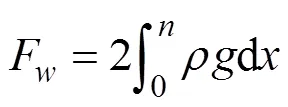
式中为测试用电缆的线密度,kg/m;为重力加速度,m/s2。
多旋翼无人机净升力F指除空机质量外的升力,包括拉力计的读数为、动力电缆对无人机的拉力为F、拉力计等辅助设备自身的重力F,其计算公式为
1.3.2 重量效率
在航空领域,推重比是衡量战斗机发动机机动性能水平和工作能力的一个综合指标[22-23],推重比越大,改变一定速度、高度、方向所需的时间越短,飞机的机动性越好[24]。
彭友梅梳理并规范了推重比的计算方法,由于推重比为无因次量,认为可将质量视为重力进行推重比的计算[25]。但是推重比不适合旋翼飞行器的评价。在直升机设计过程中一般引用重量效率进行评价,重量效率可以相当明确的表示出一架直升机空机重量减轻的程度或结构完善的程度[26-27]。本文定义电动多旋翼植保无人机的重量效率为:电动多旋翼植保无人机悬停时所产生的最大净升力与其空机重之比[28]。它不仅体现电动多旋翼植保无人机在空气动力方面的水平,也体现了结构方面的设计水平。重量效率越大,表明电动多旋翼植保无人机单位质量所能产生的推力也越大,无人机的动力性能越高。重量效率(weight efficiency)计算公式为
式中为重量效率,无因次量;F为净升力,N;为电动多旋翼植保无人机的空机重力,N。
1.3.3 热效比
多旋翼无人机无刷电机的温度是电机设计和运行中重要的性能指标之一[29],温升也是动力系统检测的一项重要指标,温度变化小,热损耗小,温升特性好,通过试验测量温升来检查电机的性能可保证电机正常运行,同时可为多旋翼无人机电机设计和选型提供参考[30-31]电机的热损耗主要有铜耗和铁耗,铜耗为绕组电流引起的热损耗,铁耗包括磁滞损耗和涡流损耗。因此,电机温升的测量和评估是一个复杂过程,不仅涉及到电机相关知识理论,还离不开传热学、流体力学等学科。
本文提出采用红外热像仪检测无刷电机平均温升的方法,将电机起始时刻的红外温度作为基准温度,使电动多旋翼植保无人机在满负荷工作状态下(电池满电电压下,操纵遥控器输出最大控制量)运行240 s时电机的温度作为电机结束时刻的温度,热效比(thermal efficiency ratio)为该该机型满负荷工作状态时总升力与温升的比值,计算公式如下
式中ter为多旋翼无人机的热效比,N/℃;∑max为多旋翼无人机满负荷工作状态下的总升力,N;T为无刷电机起始时刻的基准红外温度,℃;T为无刷电机结束时刻的红外温度,℃。
1.3.4 综合评价
制定科学、系统、全面的评价指标体系,是多旋翼无人机升力特性综合评价的关键。而仅用一个单项指标对升力特性进行评价具有一定的片面性和主观性。因此在选择多旋翼无人机升力特性评价指标时应遵循统计学中指标选取的系统性、科学性、可比性和可行性的一般原则[32]。根据多旋翼无人机升力特性的自身特点和指标体系的基本原则,选择功率载荷、重量效率和热效比这3个指标作为多旋翼无人机升力特性的评价指标。
首先,确定3项指标的权重系数,通过专家经验和有关人员大量统计结果得到,对于电动多旋翼无人机的关注度及要求,认为功率载荷和重量效率在电动多旋翼植保无人机中有同等重要的作用,热效比次之,权重比值为2∶2∶1,权重系数分别为0.4、0.4、0.2。多旋翼无人机升力特性的总分值为100分。
其次,对所测的指标进行标准化处理,使得不同种类的数据可以进行综合评价,进行标准化处理过程时,将单项指标的最大值作为该项指标的极值,然后对其他机型进行标准化处理。
最后,综合考虑以上多旋翼无人机升力特性的3大指标,得出多旋翼无人机升力特性评估值D,如式(7)所示,且有D≤100,升力性能评估值越大,则表示多旋翼无人机升力综合性能越好。该评价方法可以合理全面的对多旋翼无人机升力特性做出评价,具有较好的可延伸性和实用性。

式中q为功率载荷标准化处理结果;k为重量效率标准化处理结果;ter为热效比标准化处理结果。
1.4 测试步骤及内容
设置多旋翼无人机为姿态模式飞行,通过实时测量其输出的电流和电压信息可直接测量多旋翼无人机的有效升力,本文对3种型号的多旋翼无人机分别进行测试。该测试试验步骤如下:
1)用台秤测量多旋翼无人机的空机质量[33](指不包含载荷的多旋翼无人机质量,该质量包含电池等固体装置),测量结果为0,并且测量动力电缆的质量与长度,求得线缆的线密度(kg/m)。
2)将多旋翼无人机安装在减震测试平台中间,并将3个机臂与限位柔性绳索用扣环链接,调节限位柔性绳索的松紧度,保证3根限位柔性绳索的松紧度一致,调节阻尼减震器的高度,使多旋翼无人机能够保持水平悬挂,找到多旋翼无人机的受力中心点,将拉力传感器布置在受力中心点的正下方,将直流电源与多旋翼无人机连接,设置直流电源的电压为1(1=3.7,为电池单体的个数),调节电流电源的最大输出值为200 A。
3)将红外热像仪安装在多旋翼无人机上方,并且与PC端红外测温软件连接,开启红外热像仪与测试软件。
4)开启性能测试软件,校准拉力计读数。
5)启动多旋翼无人机,通过遥控器控制,让多旋翼无人机上升至最大值,推动遥控器控制量至最大值,并且持续飞行90 s,降落至测试平台,保存测试数据;改变电压的稳定值(此电压以初始电压为参考,每1 V为一个梯度进行测量,最大值为4.2),待测试系统与红外系统重新开启之后,启动多旋翼无人机,重复以上操作,依次改变电压值,直至达到多旋翼无人机的最大额定电压为止,保存所测数据。
6)待该机型的数据测量完毕之后,将多旋翼无人机抬至最高,测量多旋翼无人机的高度,最后将多旋翼无人机从测试平台拆下,并且测量其拉力计等辅助设备的质量为W。
7)更换机型重复以上操作,分别对其进行测试。
2 结果与分析
根据前述设计方案对3种机型进行了测试,经过数据处理之后,从净升力、总升力、功率载荷、重量效率、热效比这几方面对3种机型进行分析,分析结果如下。
2.1 不同机型净升力的对比
图4为3种多旋翼无人机80 s内净升力随时间的变化过程。从图中可以看出,随着油门控制量的增加,螺旋桨所产生的升力增加,多旋翼无人机开始平稳上升,当上升高度与拉力计自然高度相等时,多旋翼无人机角加速度开始减小,当达到某一时刻时,净升力达到最大值,速度趋近于0,加速度达到最大值。2 s以后,多旋翼无人机已经达到了最大高度,速度的变化较小,相应的净升力变化趋小并且趋于稳定。在测量无人机的净升力时,应该以趋于稳定的值作为净升力进行评价,此时的净升力最稳定,测量值最稳定。

图4 不同机型净升力的变化
2.2 不同机型总升力的对比
图5表示3种多旋翼无人机(包括多旋翼无人机空机质量)总升力随时间的变化过程。从图中可以看出,3种机型的平均总升力分别为246、363和269 N,总升力的变化趋势与图4净升力的变化趋势相近,但是对于同样是10 L载药量的多旋翼无人机,机型Ⅲ和机型Ⅰ的净升力相差不大,但是不同机型总升力量还是存在一定的差别,同样是10 L载药量的多旋翼无人机,机型Ⅰ相比机型Ⅲ的空机质量更轻。
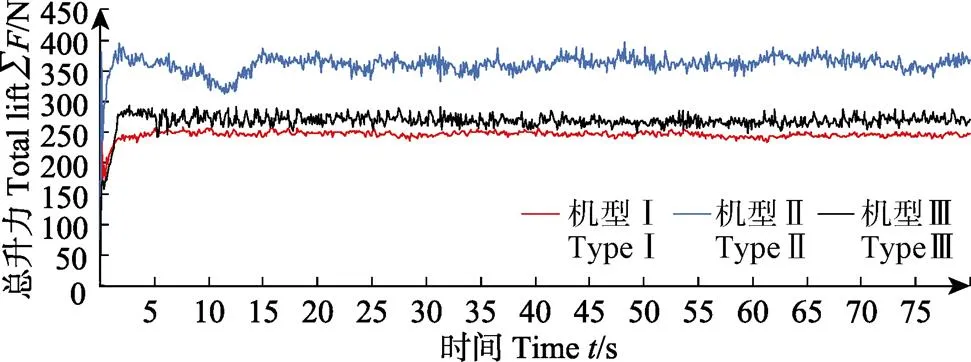
图5 不同机型总升力的变化
2.3 不同机型、不同电压下平均功率载荷的变化
由于在测量拉力过程中,起始时刻和结尾时刻的净升力不稳定,所以在进行功率载荷分析的过程中,只是从测试过程中15~90 s数据进行分析,分别求得每秒内的电压和电流的平均值,并且求得与之对应的总升力值,对此分别求解不同机型、不同电压下的功率载荷,对所求得的功率载荷进行样本统计,统计结果如表3所示。
由表3可知,在任一电压下,3种机型的功率载荷关系为机型Ⅲ>机型Ⅱ>机型Ⅰ,最好的机型Ⅲ比最差的机型Ⅰ大7.6 mN/W,并且多旋翼无人机的功率载荷随着电压的增加而逐渐减小,多旋翼无人机的电压从50降到44 V时,3种机型的功率载荷分别增加了6.7、7和8.7 mN/W。从3种机型的测试结果来看,随着电压的下降,功率载荷会有所增加,满电电压的功率载荷小于标称电压的功率载荷。

表3 不同机型、不同电压下功率载荷的均值
2.4 不同机型、不同电压下重量效率的比较
图6表示3种机型重量效率随电压的变化,在任一电压下,3种机型的重量效率关系为机型Ⅰ>机型Ⅲ>机型Ⅱ,最好的机型Ⅰ比最差的机型Ⅱ大0.33,从图中可以看出,随着功率的增加,重量效率也随之增大,3种机型的最大重量效率分别为1.29、0.96和1.15。
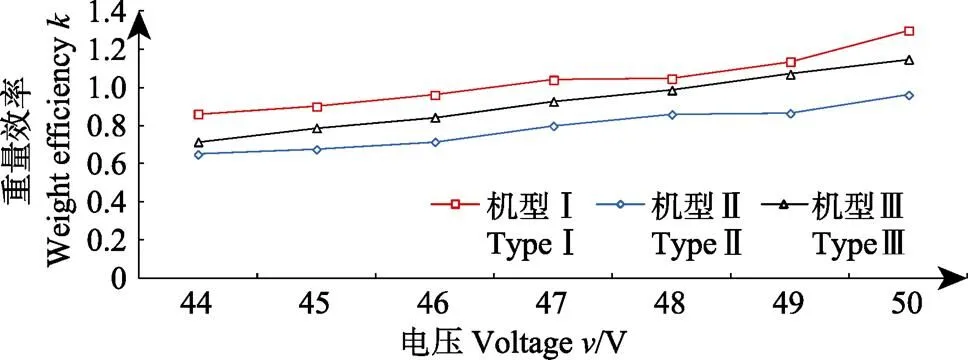
图6 不同机型、不同电压下重量效率的比较
2.5 不同机型电机温度数据的选取
对3种机型在满电电压和最大电流时的电机温度进行温升试验分析,由于试验条件限制,现阶段仅对机型Ⅰ、机型Ⅱ的2个电机和机型Ⅲ的3个电机进行了测试,机型Ⅰ和机型Ⅱ测试时的环境温度为23.7 ℃,湿度为45%,光照强度为4 050 lux,起始电机的平均温度分别为25.7和25.6 ℃;机型Ⅲ测试时的环境温度为21.5 ℃,湿度为53%,光照强度为2 040 lux,起始电机的平均温度为22.2 ℃;随着时间的增加,无刷电机的温度也会相应的变化,在进行温度变化的过程中,每个电机的变化并不是均匀的,对此进行分析发现,由于在螺旋桨高速旋转的过程中,电机中心位置温度较低,边缘温度较高,3种机型某一时刻电机温度分布如图7a机型Ⅰ、图7b机型Ⅱ、图7c机型Ⅲ所示,从图中可以看出整个电机温度分布变化较大;图8代表3种机型无刷电机直径方向上的温度变化情况,中心位置处温度最低,边缘温度相对较高,并且中心温度与边缘温度差别较大,3种机型中心到边缘最大温度的差值分别为4.8、4.9和1.5 ℃,所以温度数据的选择也较为重要。图9a机型Ⅰ、图9b机型Ⅱ、图9c机型Ⅲ分别代表整个无刷电机温度分布范围和投影位置,总体来看,整个无刷电机的温度分布呈现倒三角形,本次试验选择以边缘到中心1/4处为选取点,并且以该选取点为中心的3×3像素点的平均温度作为此时刻电机的温度。
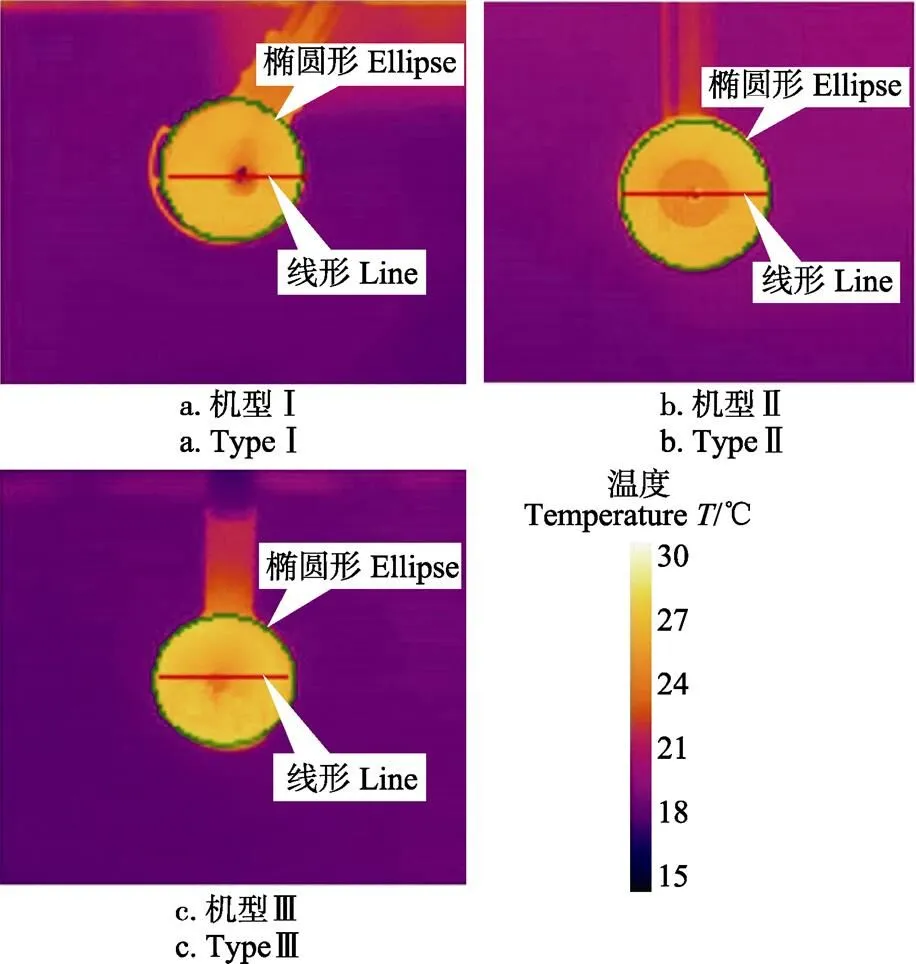
图7 电机红外热像图

图8 不同机型电机直径方向上温度变化
2.6 不同机型电机平均温度变化
在进行温升试验过程中,以最大电压和最大电流条件下工作240 s,对不同机型所测的单个电机温度求平均值,分析电机温升变化。图10表示不同机型电机温度变化曲线。由图10可知,由于环境温度的不同,电机的起始温度也会有所差异,3种机型的起始温度与环境温度的差值分别为2、1.9和-1.1 ℃,从测量数据来看,不同机型的起始温度与环境温度的差异也会不同,在此次试验中暂时未考虑由于环境温度造成的电机温度变化的差异,暂且以电机的起始温度作为参考温度进行电机温升的研究。试验结果表明,随着测试过程的进行,电机的温度首先会下降一段时间,然后上升,当达到某一值时会趋于稳定。在悬停240 s时,3种机型的温升分别为0.73、1.1和0.79 ℃,相应的热效比分别为336.98、330.00和340.50 N/℃,最好的机型Ⅲ比最差的机型Ⅱ大10.5 N/℃。

图9 椭圆形区域温度变化

图10 不同机型电机平均温度变化
2.7 综合评价
按照评价指标中的方法对3种机型进行了综合评价,功率载荷极值设置为64.95 mN/W,重量效率极值设置为1.29,热效比极值设置为340.5 N/℃。标准化处理结果及总评分如表4所示。从3种机型的综合评分来看,机型Ⅲ>机型Ⅰ>机型Ⅱ,单项指标中,机型Ⅲ的功率载荷和热效比都最好,机型Ⅰ重量效率最好。该评价方法可以合理全面的对多旋翼无人机升力特性做出评价,具有较好的可延伸性和实用性。

表4 标准化处理结果及总评分
3 讨 论
多旋翼无人机升力特性的评价是无人机性能检测的前提,对其升力特性的提升和作业效率的提高均有重要作用。根据以上的分析结果可以看出,不同机型的多旋翼无人机的净升力、总升力、功率载荷、重量效率和热效比都有所差异。本文通过功率载荷的高低、重量效率的高低和热效比的高低分别对3种机型进行了多次试验测定。
从不同机型的功率载荷结果来看,随着电压的增加螺旋桨的转速增加,由于螺旋桨转速越高效率越低,所以3种机型的功率载荷与电压成负相关。不同机型功率载荷的异同主要是由于整个多旋翼无人机动力系统的效率与结构不同造成的。无人机的动力效率分为螺旋桨的效率、电机的效率、电子调速器的效率和电池的转换效率以及螺旋桨和电机的匹配性。对于本文的试验,采用直流电源供电的形式,直接将所需要的电能输送给多旋翼无人机,所以不需要考虑电池的转换效率,这部分主要是由于电子调速器的效率、电机的效率、螺旋桨的效率以及螺旋桨和电机的匹配性造成的。机型Ⅰ与机型Ⅲ在力效功率载荷这一指标差距较大,由于3种机型所采用的电机和螺旋桨均为不同厂家、不同规格的产品,并没有进行深入横向对比,只是从整体效率和结构进行了对比。通过对多旋翼无人机的整机功率载荷进行对比发现,功率载荷随着旋翼数量的增加而增加;功率载荷的高低反应了整个动力系统的效率,建议小载荷类多旋翼无人机可以采用较少的旋翼来驱动,大载荷类无人机建议采用较多旋翼来驱动;对于机型Ⅰ可以通过改进电机和螺旋桨的效率与匹配性增加整体的功率载荷;其次,可以通过增加旋翼的数量提高整机的功率载荷。对于机型Ⅱ可以通过增加螺旋桨的直径或者增加旋翼的数量来提高整机的功率载荷。
从不同机型的重量效率结果来看,动力系统的重量效率既要满足当前机型有效载荷的要求,又要留有足够的余量,保证无人机的操纵性和安全性。从3种机型来看,机型Ⅰ和机型Ⅲ的有效载荷是相等的,但机型Ⅰ的重量效率优于机型Ⅲ的重量效率,由于机型Ⅰ为四旋翼无人机,机型Ⅲ为八旋翼无人机,机型Ⅰ相比于机型Ⅲ结构完善的程度较高,机型Ⅲ在重量效率方面还有一定的提升空间;机型Ⅱ的重量效率较低,与其他2种机型进行对比,机型Ⅱ为16 L的六旋翼无人机,在空机质量减轻的程度上还有待提高,载质量相比其他两种机型更大,并且机型Ⅱ结构相比于其他2种机型结构更加复杂,首先有2根机架承力杆件冗余,机身结构不够紧凑,机械结构不够优化。其次,机身采用铝合金材质,没有采用碳纤维材质,相应的增加了自身的质量,机型Ⅱ可以通过改换更轻的材质,改进承力杆件冗余部件或者增加旋翼的直径来增加重量效率。在实际满载飞行过程中,机型Ⅱ相比其他2种机型的操纵性比较迟缓。
从不同机型的热效比结果来看,3种机型的热效比关系为机型Ⅲ>机型Ⅰ>机型Ⅱ,相比于其他温升试验,电动多旋翼无人机在温升方面有自身的优势,在螺旋桨高速旋转的过程中,本身就能够产生较大的气流,对电机进行降温。载荷相当的机型,螺旋桨的直径越大,相对的负载或输出拉力越大,其产生的热量也就越多,所以机型Ⅰ电机产生的热量大于机型Ⅲ电机产生的热量。对于螺旋桨尺寸相当的机型,消耗功率越大,产生的升力越大,电机产生的热量越多,所以机型Ⅱ产生的热量大于机型Ⅲ产生的热量。
综上所述,不能将单一指标作为多旋翼无人机升力特性的评价指标,采用功率载荷、重量效率和热效比相结合的方式作为多旋翼无人机升力特性的评价指标,既能体现无人机动力系统的效率和空气动力方面的水平,也体现了结构方面的设计水平。
4 结论与展望
本文搭建了半系留式多旋翼无人机性能测试平台,建立了多旋翼无人机升力性能检测的综合模型。为了验证模型的可行性,对3种不同机型进行了升力特性指标的性能测试试验。试验结果表明:3种机型在功率载荷、重量效率、热效比等方面有较大差异,3种机型进行综合评分的结果为机型Ⅲ(95.658 9)>机型Ⅰ(94.186 6)>机型Ⅱ(85.916 3),功率载荷最好的机型Ⅲ比最差的机型Ⅰ大7.6 mN/W,重量效率最好的机型Ⅰ比最差的机型Ⅱ大0.33,热效比最好的机型Ⅲ比最差的机型Ⅱ大10.5 N/ ℃,反映出3种机型在设计过程中整个动力系统效率、机型整体结构和材料选择上的差异,从而在整机作业性能上表现出差异。并且对不同机型提出了几点相应的改进建议,对于机型Ⅰ可以通过改进动力系统整体的转化效率来提高功率载荷;对于机型Ⅱ可以通过优化整体结构或者改换更轻的材质;对于机型Ⅲ可以通过优化整体结构来提高重量效率,比如减少旋翼的数量。
在上述指标测试的基础上,结合无人机动力系统数学模型,提出了运用功率载荷、重量效率和热效比进行电动多旋翼植保无人机升力特性综合评价的评分方法,用此方法对在用多旋翼无人机进行大量的试验,可以建立标准多旋翼无人机升力特性检测数据库,这样可以更加客观准确的评定无人机技术等级,加强在用多旋翼无人机的管理。
多旋翼无人机的检测工作还处在起步阶段,相应的检测设备和技术还需进一步的完善。在多旋翼无人机的性能评价中,不能过分追求功率载荷、重量效率和能效比方面的提高,应秉持技术性能、可靠性能、安全性能、经济性等方面的平衡理念,以研制出满足多旋翼无人机需求型号的产品为目标,应竭力避免性能论。
[1] 周志艳,臧英,罗锡文,等. 中国农业航空植保产业技术创新发展战略[J]. 农业工程学报,2013,29(24):1-10.Zhou Zhiyan, Zang Ying, Luo Xiwen, et al. Technology innovation development strategy on agricultural aviation industry for plant protection in China[J]. Transactions of the Chinese Society of Agricultural Engineering Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2013, 29(24):1-10. (in Chinese with English abstract)
[2] 周志艳,明锐,臧禹,等. 中国农业航空发展现状及对策建议[J]. 农业工程学报,2017,33(20):1-13. Zhou Zhiyan, Ming Rui, Zang Yu, et al. Development status and countermeasures of agricultural aviation in China[J]. Transactions of the Chinese Society of Agricultural Engineering Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(20):1-13. (in Chinese with English abstract)
[3] Gong A, Verstraete D. Fuel cell propulsion in small fixed-wing unmanned aerial vehicles: Current status and research needs[J]. International Journal of Hydrogen Energy, 2017, 42(33): 21311-21333.
[4] Lawrence D A, Mohseni K. Efficiency analysis for long duration electric MAVs[J]. American Institute of Aeronautics and Astronautics, 2005, 29(26): 1-13.
[5] Stepaniak M J, Graas F V, Haag M U. Design of an electric propulsion system for a quadrotor unmanned aerial vehicle[J]. Journal of Aircraft, 2015, 46(46): 1050-1058.
[6] 唐伟,宋笔锋,曹煜,等. 微小型电动垂直起降飞行器总体设计方法及特殊参数影响研究[J]. 航空学报,2017,38(10):115-128. Tang Wei, Song Bifeng, Cao Yu, et al. Preliminary design method of the miniature electric-powered vertical takeoff and landing unmanned air vehicle and effects of special parameters[J]. Acta Aeronautica et Astronautica Sinica, 2017, 38(10):115-128. (in Chinese with English abstract)
[7] 季路成,陈江. 从IHPTET到VAATE的技术方向探析[C]// 第十一届年会热机气动热力学学术会议论文集.北京:中国工程热物理学会,2005:633-647.Ji Lucheng, Chen Jiang. The technical direction of IHPTET to VAATE is analyzed[C]//Proceedings of the 11th Annual Conference on Thermal Engine Aerodynamic Thermodynamics.Beijing, China Institute of Engineering Thermal Physics, 2005:633-647.
[8] 谷新宇,李宗伯. 微小型电动无人机动力系统试验台的设计与实现[J]. 科技资讯,2010,172(2):114-116. Gu Xinyu, Li Zongbo. Design and implementation of the dynamic system testing platform of micro electric UAV[J]. Science & Technology Information, 2010, 172(2): 114-116. (in Chinese with English abstract)
[9] Youngren H, Chang Ming. Test, analysis and design of propeller propulsion systems for MAVs[C]// Aiaa Aerospace Sciences Meeting Including the New Horizons Forum and Aerospace Exposition. Florida: American Institute of Aeronautics and Astronautics, 2011: 4-7.
[10] 王刚, 胡峪, 宋笔锋, 等. 电动无人机动力系统优化设计及航时评估[J]. 航空动力学报, 2015, 30(8):1834-1840. Wang Gang, Hu Fu, Song Fengbi, et al. Optimal design and endurance estimation of propulsion system for elctric Powered unmanned aerial vehicle[J]. Journal of Aerospace Power, 2015, 30(8): 1834-1840. (in Chinese with English abstract)
[11] 郑欣,史腾飞,陈国青,等. 四旋翼无人机的动力效率实验研究[J]. 云南电力技术,2017,45(1):73-78. Zheng Xin, Shi Tengfei, Chen Guoqing, et al. Experimental study on dynamic efciency quad-rotor UAV[J]. Yunnan Electric Power, 2017, 45(1): 73-78. (in Chinese with English abstract)
[12] Liebold J E, Peter A M, Mccay M. A study of multi-copter power source selection: From lithium polymers to fuel cells[J]. AUVSI Unmanned Systems, 2014(1): 132-147.
[13] 王东,范叶满,张海辉,等. 一种电动多旋翼飞行器力效测试装置:CN205353196U[P]. 2016-06-29.
[14] 王爱明,杨庆东,杨雷. 基于LabVIEW的直线电机推重比测试系统[J]. 煤炭技术,2009,28(4):17-19. Wang Aiming, Yang Qingdong, Yang Lei. Linear motor's thrust-weight ratio test system based on LabVIEW [J]. Coal Technology, 2009, 28(4): 17-19. (in Chinese with English abstract)
[15] Gur O, Rosen A. Optimizing electric propulsion systems for unmanned aerial vehicles[J]. Journal of Aircraft, 2009, 4(46): 1340-1353.
[16] 石磊. 电动无人机的动力系统构成[J]. 电子技术与软件工程,2017(3):147. Shi Lei. The power system of an electric drone is made up[J]. Electronic Technology and Software Engineering, 2017(3): 147. (in Chinese with English abstract)
[17] 赵长辉,卢黎波,陈立玮,等. 飞机的电动力系统技术概述[J]. 航空工程进展,2011,2(4):449-458. Zhao Changhui, Lu Libo, Chen Liwei. Overview of electric propulsion system technology for aircraft[J]. Advances in Aeronautical Science and Engineering, 2011, 2(4): 449-458. (in Chinese with English abstract)
[18] Electric aircraft[EB/OL]. [2018-01-09] https://en.wikipedia. org/wiki/Electric_aircraft.
[19] 石屾. 微小型无人机电机驱动设计及飞行姿态仿真[D]. 北京:北京交通大学,2011. Shi Shen. Motor Drive System Design and Flight Attitude Simulation for Micro Aerial Vehicle[D].Beijing: Beijing Jiaotong University, 2011. (in Chinese with English abstract)
[20] Onda M, Nanba M, Matsuuchi K, et al. Stratospheric LTA platform and its thrust efficiency with a stern propeller[J]. American Institute of Aeronautics and Astronautics, 2002, 23(20): 1-10.
[21] Paweł C M, Ignacy D, Marcin P. Laboratory tests of a PM-BLDC motor drive[C]//Selected Problems of Electrical Engineering and Electronics. Poland: Institute of Electrical and Electronics Engineers, 2015:17-19.
[22] 江义军. 推重比12~15发动机技术途径分析[J]. 航空动力学报,2001,16(2):103-107. Jiang Yijun. Technical approaches to thrust-weight ratio 12-15 of aeroengine[J]. Journal of Aerospace Power, 2001, 16(2): 103-107. (in Chinese with English abstract)
[23] 张宝诚. 航空发动机的现状和发展[J]. 沈阳航空工业学院学报,2008,25(3):6-10. Zhang Baocheng. State and development of aero-engine[J]. Journal of Shenyang Institute of Aeronautical Engineering, 2008, 25(3): 6-10. (in Chinese with English abstract)
[24] R. W. 普劳蒂. 直升机性能及稳定性和操纵性[M]. 北京:航空工业出版社,1990.
[25] 彭友梅. 航空燃气涡轮发动机推重比概念和确定方法[J]. 燃气涡轮试验与研究,1994(1):30-34. Peng Youmei. Aviation gas turbine engine weight ratio concept and determination method[J]. Gas Turbine Experiment and Research, 1994(1): 30-34. (in Chinese with English abstract)
[26] 张呈林,郭才根. 直升机总体设计[M]. 北京:国防工业出版社,2007.
[27] 总编委会. 飞机设计手册第19册[M]. 北京:航空工业出版社,2005.
[28] 刘大响,程荣辉. 世界航空动力技术的现状及发展动向[J]. 北京航空航天大学学报,2002,28(5):490-496. Liu Daxiang, Chen Ronghui. Current status and development direction of aircraft power technology in the world[J]. Journal of Binjing University of Aeronautics and Astronautics, 2002, 28(5): 490-496. (in Chinese with English abstract)
[29] 王森. 无人机主推进高力能密度永磁电动机关键技术研究[D].沈阳:沈阳工业大学,2014. Wang Miao. The Key Technology Research on Main Propulsion High Energy Density Permanent Magnet Motor of Unmanned Aerial Vehicle[D].Shenyang: Shenyang University of Technology, 2014. (in Chinese with English abstract)
[30] 凌文星. 电机温升分析研究[J]. 机电技术, 2010, 2(3):66-67. Ling Wenxing. Analysis and study of motor temperature rise[J]. Mechanical and Electrical Technology, 2010, 2(3): 66-67. (in Chinese with English abstract)
[31] 程明,张淦,花为. 定子永磁型无刷电机系统及其关键技术综述[J]. 中国电机工程学报,2014,34(29):5204-5220. Cheng Ming, Zhang Gan, Hua Wei. Overview of stator permanent magnet brushless machine systems and their key technologies[J]. Proceedings of the CSEE, 2014, 34(29): 5204-5220. (in Chinese with English abstract)
[32] 苏为华. 多指标综合评价理论与方法问题研究[D]. 厦门:厦门大学,2000. Su Weihua. Research on the Theory and Method of Multi-Index Comprehensive Evaluation[D].Xiamen: Xiamen University, 2000. (in Chinese with English abstract)
[33] 张楠. 某型号无人机质量质心测量设备的研制[D].哈尔滨:哈尔滨工业大学,2013. Zhang Nan. Development of Measurement Apparatus for Determining the Mass and Centroid a Certain UAV[D].Harbin: Harbin Institute of Technology, 2013. (in Chinese with English abstract)
Comprehensive evaluation method for lifting characteristics of electric multi-rotor UAV for plant protection
Zang Ying, He Xingang, Zhou Zhiyan※, Ming Rui, Zang Yu, Luo Xiwen, Lan Yubin
(1.510642,; 2.510642,; 3.of,510642,)
With the rapid development of agricultural aviation, electric multi-rotor unmanned aerial vehicles (UAV) for planting protection are favored in plant protection operations due to their advantages of vertical take-off and landing, air hovering, and easy operation. However, because of its low aerodynamic efficiency, there are currently problems such as low loading mass and short battery life, and it is still necessary to optimize and improve it. The lift characteristics is one of the important parameters for the performance test of the multi-rotor UAV. However, few tests have been conducted on the lifting characteristics of multi-rotor UAV. How do we comprehensively evaluate the lifting characteristics of various types of multi-rotor UAV and make comparisons and judgments on the performance of multi-rotor UAV. At present, there are no standards to follow. Only by clearly defining the evaluation index for lift performance, and by standardizing the test methods and evaluation criteria, the performance of the multi-rotor UAV can be judged and the suggestions for optimization and improvement can be given. Based on the existing research results, this paper considered the functional effectiveness criteria of helicopters combining economy, weight reduction, and heat transfer. A method of test and evaluation for the lift characteristics of the semi-tethered multi-rotor UAV is proposed. It includes performance testing semi-tethered platform, lift characteristics test method and index, and lift characteristics evaluation method. In order to verify the feasibility of the method, the performance test of 3 different models (four-rotor, Type I; six-rotor, Type II; and eight-rotor, Type III) was carried out. The test results show that the 3 models have great difference in power load, weight efficiency and thermal efficiency ratio. Type III is the best in power load, 7.6 mN/W larger than the worst Type I. The best Type II is 0.33 larger than the worst Type Ⅱ in weight efficiency. The best Type III is 10.5 N/℃ larger than the worst Type I in thermal efficiency ratio. It reflects the difference in motor and propeller selection and structure of the 3 models of aircraft during the design process, thus showing difference in the performance of the whole machine. On the basis of the above index test, combined with the mathematical model of multi-rotor UAV power system, a scoring method is put forward to evaluate the lift characteristics of the multi-rotor UAV using the power load, weight efficiency and thermal efficiency ratio. The results of the comprehensive score of the 3 types are as follows: Type III > Type I > Type II. The results show that the proposed evaluation method can effectively evaluate the lift characteristics of different types of multi-rotor UAV. It can more objectively and accurately assess the technical level of multi-rotor UAV and strengthen the management of multi-rotor UAV in use. The test and evaluation method presented in this paper can not only be used to evaluate the performance of the multi-rotor UAV, but also provide a reference for the further improvement of the model performance. Of course, in the performance evaluation of multi-rotor UAV, the improvement of power load, weight efficiency and thermal efficiency ratio cannot be excessively pursued, and the balance of technical performance, reliability performance, safety performance, and economical efficiency should be upheld.
unmanned aerial vehicle; models;agricultural machinery; battery power; lifting characteristics; power load; weight efficiency; thermal efficiency ratio
臧 英,何新刚,周志艳,明 锐,臧 禹,罗锡文,兰玉彬.电动多旋翼植保无人机升力特性综合测评方法[J]. 农业工程学报,2018,34(14):69-77. doi:10.11975/j.issn.1002-6819.2018.14.009 http://www.tcsae.org
Zang Ying, He Xingang, Zhou Zhiyan, Ming Rui, Zang Yu, Luo Xiwen, Lan Yubin. Comprehensive evaluation method for lifting characteristics of electric multi-rotor UAV for plant protection[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(14): 69-77. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2018.14.009 http://www.tcsae.org
2018-01-09
2018-05-04
广东省科技计划项目(2014A020208103, 2015B020206003,2014B090904073,2017B090907031);广东省现代农业产业技术体系创新团队项目(2017LM2153)
臧 英,博士,教授,主要从事农业航空应用技术研究。Email:yingzang@scau.edu.cn
周志艳,博士,教授,主要从事农业航空应用技术研究。Email:zyzhou@scau.edu.cn。中国农业工程学会会员:周志艳(E042100021M)
10.11975/j.issn.1002-6819.2018.14.009
S25
A
1002-6819(2018)-14-0069-09