工业机器人虚拟仿真中的电缆物理特性应用
2018-08-07叶晖
叶 晖
0 前言
随着中国智能制造与自动化应用的日益广泛,自动化生产线中应用工业机器人越来越多。在项目实施之前,对工业机器人进行应用的虚拟仿真是一个必不可少的环节。这样做的目的是,在计算机中虚拟仿真一个与真实一模一样的场景,对工业机器人的选型、布局和周边设备的设置进行验证。在工业机器人虚拟仿真软件中引入物理特性功能,就是为了能够获得更好地虚拟仿真效果。在本文中就以实际应用物理特性中电缆的虚拟仿真进行描述的。
1 工业机器人虚拟仿真软件的使用准备
工业机器人虚拟仿真软件在开始进行项目之前,先对工业机器人虚拟仿真软件进行一个说明。
在本项目中,选用ABB公司的工业机器人虚拟仿真软件ROBOTSTUDIO,版本是6.05.02。更低版本的软件不支持物理特性这个功能。
在ROBOTSTUDIO中,构建起工业机器人的工作站需要机器人及周边配置设备的三维模型。其中软件本身自带工业机器人的三维模型,而周边设备的三维模型,需要从其他三维软件建模后,导入到ROBOTSTUIO进行使用[1]。而ROBOTSTUDIO所支持的三维模型格式如表1所示。

表1 ROBOTSTUDIO支持的三维模型格式
2 点焊机器人线缆包的电缆物理特性虚拟仿真应用
点焊机器人是工业机器人最广泛最成熟的应用之一。在点焊机器人的应用中,点焊枪需要连接焊接电源、动力电源、反馈信号线、冷却水回路和压缩空气回路(包含了典型的水、电、气回路)。从机器人第六轴法兰点焊枪到机器人底座这一段电缆工作要求是相当严苛的,机器人为了到达各种点焊姿态点,电缆都会经常性的发生接近小于90度角的弯曲,这是水、电、气管路的柔性与长度提出了很高的设计要求。管路过短容易发生扯断从而造成损坏,过长则容易造成在大范围运动时发生缠绕。
在虚拟仿真中进行点焊机器人的项目仿真验证时,电缆的物理特性仿真一直是一个难题,只能依靠工程师的经验进行设定。当变更点焊枪相关的设计后,电缆的长度确定只能凭感觉,这样的话,可能在实际使用后,发生电缆损坏后才能确认此次的电缆长度设计有不合理的地方存在了。
ROBOTSTUDIO的新功能——物理特性电缆仿真,就能很好地解决这个难题。
下面通过对ABB型号为IRB6700的点焊机器人进行电缆的设计仿真。
在ROBOTSTUDIO中打开一个IRB6700机器人三维模型,如图1所示。

图1 IRB6700点焊机器人
在图1中,图示的ABC三个方框的位置是电缆设计时需要考虑的部分。
首先对A部分的电缆进行设定。使用ROBOTSTUDIO中的尺寸测量功能,先确认电缆两个端口的直径,按照操作步骤得知直径是69.99 mm,如图2中所示。
在确认电缆的直径以后,就开始使用ROBOTSTU⁃DIO中的“电缆”功能进行电缆的自动生成。操作流程如下。
可以根据将采用的线缆抵抗形变能力,进行杨氏模量的设定。

图2 轴2轴3连接电缆直径的获取

图3 选择“电缆”功能与选择“捕捉圆心”

图4 连接电缆端口
杨氏模量是描述固体材料抵抗形变能力的物理量。当一条长度为L、截面积为S的金属丝在力F作用下伸长ΔL时,F/S叫应力,其物理意义是金属丝单位截面积所受到的力;ΔL/L叫应变,其物理意义是金属丝单位长度所对应的伸长量。应力与应变的比叫弹性模量。ΔL是微小变化量。杨氏模量(Young′smodulus),又称拉伸模量(tensile modulus)是弹性模量(elastic modulusor modulusof elastic⁃ity)中最常见的一种。杨氏模量衡量的是一个各向同性弹性体的刚度(stiffness),定义为在胡克定律适用的范围内,单轴应力和单轴形变之间的比。与弹性模量是包含关系,除了杨氏模量以外,弹性模量还包括体积模量(bulk modulus) 和剪切模量 (shear modulus) 等。Young′s modu⁃lus E,shear modulus G,bulk modulus K,和 Poisson′s ratio ν之间可以进行换算,公式为:E=2G(1+v)=3K(1-2v)。
需要调整一下这段电缆的颜色为黑色,使之与固定端一致。在线缆上点击鼠标右键,在菜单中选择“设定颜色..”,如图5所示。

图5 电缆设定颜色
在完成了A部分的电缆设定以后,以此类推,对B、C部分的电缆进行设定,如图1所示。
全部电缆设定好的效果如图6所示。

图6 全部电缆设定好
接着下来,要在ROBOTSTUDIO中编写一段用于测试电缆在机器人运动时的动态效果的RAPID程序。用于测试的程序主要是机器人的轴运动指令,重点以轴2、轴3和轴5的动作为主,并且要考虑到机器人在应用的过程需要达到的所有接近权限的位置,从而获取电缆的关于最大张力、最大弯曲/扭曲张力和长度范围数据。所以使用的RAPID的代码节选如下:
MODULEModule1
CONSTjointtargetj10:=[[0,0,0,0,30,0],[9E+09,9E+09,9E+09,9E+09,9E+09,9E+09]];
CONSTjointtargetj20:=[[0,45,0,0,30,0],[9E+09,9E+09,9E+09,9E+09,9E+09,9E+09]];
CONSTjointtargetj30:=[[0,45,0,0,30,0],[9E+09,9E+09,9E+09,9E+09,9E+09,9E+09]];
CONSTjointtargetj40:=[[0,0,45,0,30,0],[9E+09,9E+09,9E+09,9E+09,9E+09,9E+09]];
PROCmain()
!Add your code here
!AXIS2
MoveAbsJj10NoEOffs,v2000,fine,tool0;
MoveAbsJj20NoEOffs,v2000,z20,tool0;
MoveAbsJj10NoEOffs,v2000,z20,tool0;
MoveAbsJj30NoEOffs,v2000,z20,tool0;
ENDPROC
ENDMODULE
使用ROBOTSTUDIO中的信号分析器功能,根据以往的经验,C部分的电缆长度的设定是最难的。所以在这里,使用ROBOTSTUDIO中的信号分析器功能,对C部分电缆的最大张力、最大弯曲/扭曲张力和长度范围数据进行分析。

图7 信号设置

图8 生成信号分析数据
在图9中,发现长度最大值超过了对C部分电缆的长度设定,致使最大张力的最大值偏大,如果不对电缆的长度进行调整的话,在实际过程中,很快就会出现电缆折断的情况。
根据分析数据,将电缆的长度调整为长度最大值1 352 mm。然后再进行一次虚拟运行来获取电缆的信号分析。

图9 C部分电缆数据分析

图10 修改电缆的长度数值
在表2的信号分析中,能看到关于电缆的三个主要参数都得到了改善,特别是最大张力方面,最小值与最大值之间的差距在一个合理的范围之内。至此,就完成了对C部分电缆的动态分析,获取了一个合理的电缆长度数据。这个在点焊机器人的设计中是至关重要的。
根据与C部分电缆同样的方法,就可以对A/B部分的电缆也进行虚拟仿真验证,来完成电缆的设计了。最后得出的电缆长度数据如图10。
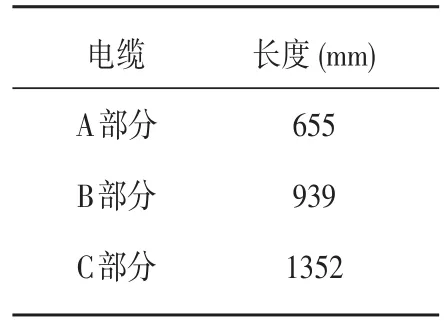
表2 电缆长度数据
3 结论
使 用 了 ROBOTSTU⁃DIO软件的物理特性的电缆虚拟仿真功能对点焊机器人的线缆进行动态的仿真与设计数据确定,大大节省了设计时间,并提高了电缆长度设计的准确性。很好地满足了点焊机器人在高强度、高速度下对机器人电缆可靠性的要求。对今后类似的机器人项目中机器人与电缆的设计选型具有一定的借鉴意义。
