基于拓扑优化的工业机器人结构设计*
2018-08-07吴立华康国坡李克天
吴立华,白 洁,康国坡,李克天
0 引言
工业机器人经历多年发展,逐步朝着高精度、高速度发展,不但对工业机器人的控制提出了更高的要求,也对机器人的机械结构提高出了更高的要求,不仅要轻量化而且要具有足够的强度、刚度和具有较好的动态特性,这些相互冲突的目标,即为当下常见的多目标优化问题。
在结构优化方面,拓扑优化有着非常广泛的应用,拓扑优化是研究在给定的设计区域内寻求材料最优分布的问题,而将多目标的问题如何转化为单目标问题是当前的多目标拓扑优化基本方法和研究重点,目前国内有不少人开展了相关研究。饶柳生[1]等采用了一种通过折衷规划法和功效函数法转化而成的多目标拓扑优化方法改进了机床立柱的设计,张志飞[2,3]等针对汽车悬架控制臂进行了多目标的拓扑优化研究,提出一种基于折衷规划法归一化子目标建立综合目标函数、以灰色综合关联分析确定综合目标函数中子目标权重系数的方法。许辉煌[4]等将利用线型加权的多目标的拓扑优化应用在工业机器人的结构设计中。姚涛[5]等利用分析层级法确定多目标各子目标权重,将多目标问题成功的转化为单目标的问题。
本文选用某企业额定载重为6 kg的商用工业机器人本体的大臂作为分析对象,采用多目标的拓扑优化方法,通过动力学分析获得大臂在整个工作空间内的极限载荷,选择结构刚度和前几阶固有频率的提高作为优化目标。
1 大臂的结构与特性分析
1.1 结构说明
在串联型工业机器人(如图1所示)的结构中,大臂承担了机器人了肩部、小臂、腕部和负载全部重量,且其结构为细长型,与其他部件对比,其刚度和动态特性对末端执行机构精度影响较大,对其刚度和动态特性要求高。
1.2 强度分析和模态分析

图1 工业机器人CAD模型
工业机器人在实际运行中,下端和腰部相连,上端与肩部相接承受扭矩和力。在整个工作空间内利用动力学分析,获得某型号工业机器人大臂在典型极端工况下关节的峰值力和峰值扭矩[6],用作下一步强度分析的受力边界条件。
建立大臂的有限元模型,对大臂进行静力学分析,结果如图2、图3所示。

图2 大臂应力图
分析结果表明,大臂的最大变形是0.42 mm,最大应力是75.2 MPa。强度满足要求,但是其变形较较大,刚度较弱,影响机器人的整体的动态性能和末端的精度,因此下一步目标是进行提高刚度的优化设计。
在大臂下端固定的情况下对其进行模态分析,高阶模态对结构震动的影响较小,只关注其低阶前6阶模态,如表1所示。提高低阶固有频率有利于改善结构的动态特性,提升机器人的定位精度。

图3 大臂位移图
2 大臂拓扑优化
2.1 多目标优化方法
折衷规划法比较适合用于优化目标属性不同的优化问题,其思路是把多目标优化问题折衷为与每个目标函数的理想最优解误差最小的矢量,消除不同属性或同属性不同量级的影响,从而完成将多目标问题转化为单目标问题。综合考虑极限工况下的结构刚度和固态固有频率,最终得到带权重系数的折衷规划法的拓扑优化目标函数[2,+7]。

或

其中:
F(ρ)——综合目标函数;
m——子目标数目;
ρ——设计变量即材料相对密度;
wk——第k个子目标的权重系数;
Ck(ρ)——第k子目标的目标函数;
p——惩罚因子,一般取p≥2;
2.2 大臂的拓扑优化
根据大臂实际安装条件(如RV减速器等安装需求)和受力条件,并对大臂模型的细节处做简化处理,整个大臂分为拓扑优化区域和非优化区域,如图4所示。

图4 拓扑优化有限元模型
大臂进行多目标拓扑优化时,根据优化目标的重要程度,取刚度目标权值0.4,频率目标权值0.3,质量目标权值0.3,通过自定义函数功能编写多目标函数后借助Hyperworks软件中Optistruct求解器进行结构拓扑优化求解,经过14次迭代目标函数收敛,拓扑优化后的模型如图5所示。

图5 拓扑优化后的模型
从图5可以看出,红色区域主要集中在大臂的两端以及中间底板部分,其中间蓝色区域可以考虑去除。其他如大臂与肩部连接处的不规则小孔,可根据实际需要考虑是否去除。
2.3 大臂的改进设计与分析
参考多目标优化后的大臂材料分布云图和结构的加工工艺并忽略细小孔洞[8],在中间两侧腹板开槽口,在与底座相近的大臂增加2个加强筋,提高其刚度,改进后的结构如图6所示。

图6 优化后的大臂结构
改进后的大臂质量为22.28 kg,比原结构降低约6.7%;对其进行结构分析和模态分析,结果表明改进后的大臂各阶模态都有一定程度的提高,强度和刚度性能均得到有效改善,见表1、表2。
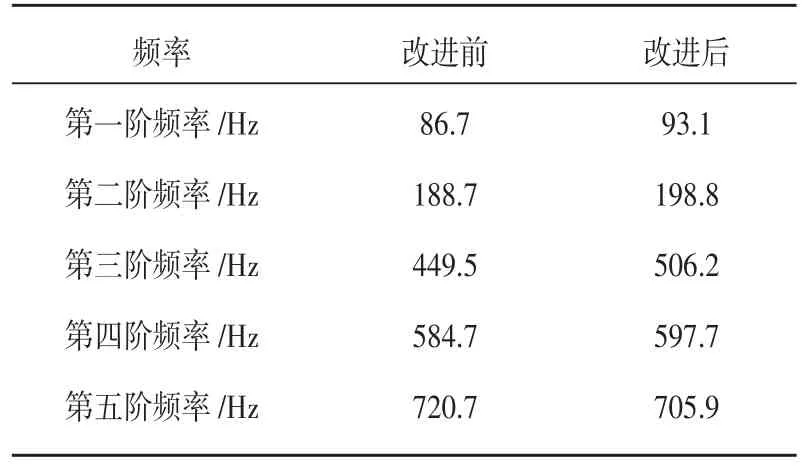
表1 大臂改进前后动态特性对比表

表2 大臂改进前后静态特性对比表
3 小结
本文提出了一种多目标的拓扑优化方法,并以某商用工业机器人的薄弱零件(大臂)为例,运用该方法进行了多目标拓扑优化,优化结果显示大臂的刚度、强度性能明显增强,固有频率均有不同程度提高,轻量化效果明显。
