无人机空间定位的图像识别研究
2018-08-04谢声扬陆俊帆宁志朋何桂尖隋明君卢罗芳
韦 为 ,谢声扬 ,陆俊帆 ,宁志朋 ,何桂尖 ,隋明君 ,卢罗芳
(1.桂林航天工业学院,广西 桂林 541004;2.广西大学,广西 南宁 530004)
0 引言
目前我国在果树的农药喷洒领域主要是用人工作业的方式进行喷洒,该方法不仅耗费大量人力物力,而且效率也极为低下。基于果树图像识别的无人机农药喷洒空间定位研究仍然较少[1-2]。农作物的图像识别方法主要是采用在RGB颜色空间内,目标图像与背景颜色的区别,设定一个颜色阈值将农作物所占的颜色像素与背景物的颜色像素相分离,最终达到农作物图像识别的目的[3]。但针对果树的图像识别方法目前还不是特别成熟[4-7]。
果园会根据果树的种类不同而采用不同的种植间隔,不同果树的树冠直径也不同,其空间分布的复杂程度将会对无人机进行精确农药喷洒造成较大影响。本文以芒果树为研究对象,通过CCD摄像头拍照,然后应用图像识别的方法,获得无人机喷洒农药的理想空间位置。对提高果树的农药喷洒效率有较高的实际应用价值。
1 定位识别的基本原理
图像识别的基本过程为:将CCD摄像头安装在植保无人机下方悬挂点处。开启图像识别程序,开启CCD摄像头,操控植保无人机飞往芒果树上方。用LABVIEW软件编写上位机软件平台开始调用CCD摄像头拍照的图像,从高空拍摄若干棵树的树冠图像,并进行图像预处理,如若图像的预处理效果不理想,则输出相应飞行指令,微调无人机飞行方位,直至图像预处理结果理想为止。
将预处理理想的图像经由图像识别程序进行处理,提取图片内若干棵树的大致轮廓,并通过程序算法去除多余的干扰物,而后标记出每棵树的质心。选取其中一棵树的质心点,使其与屏幕中心点基本对齐,从而确定无人机施药的XY位置。输入指令,将无人机调至施药高度,系统通过果树轮廓的面积与世界坐标的对应比例,判断出树顶与植保无人机的大致高度以及树冠的大致直径,实现自动控制无人机的路径规划以及施药高度。具体原理流程如图1所示。

图1 定位识别原理流程图
2 识别具体算法及实施
2.1 图像预处理
芒果树的图像预处理是图像识别最重要的一步,主要目的是为了消除照片的杂乱信息。照片属于彩色照片,芒果树的树叶以绿色为主。在实际情况中,种植芒果树的果园通常会以固定的植株距离去种植芒果树。但是由于果园的地理环境、天气因素等外界因素的不同,通过芒果树照片其树叶可能受到阴影的干扰从而导致颜色与预期的绿色有所差异。若果园所确定的种植株距较密,则树木与树木之间很可能存在着树叶的大量交集,并且图像的背景物颜色也可能与树叶大致相同。目前的识别方法主要是区分目标物与背景物的颜色,从而进行目标图像与背景物图像的分割。当干扰物的绿色分量与树叶的绿色分量数值接近的时候,很可能会产生误识别,这对图像预处理有较大影响。对于部分种植株距大,背景物与芒果树色差相对较大的果园,采用RGB颜色空间进行图像预处理是可行的,但是对于存在上述干扰情况的芒果园来说,采用RGB空间的图像预处理方法则是不可行的。
尝试把图像预处理的方法从常规的RGB颜色空间转换为HSV空间。HSV空间的三个分量H(色调)、S(饱和度)、V(亮度)相对于RGB的三个分量来说,相互关联度更小,更有利于芒果树的图像预处理。对芒果树的预处理操作主要包括:图像二值化处理、图像膨胀处理、图像较小面积元删除处理、图像连通区域质心标记处理等。图像预处理过程如图2所示,进行小面积元删除时可能会忽略某些面积相对较大的孔洞区域,此时可用WHITE循环检测连通域的数量,进而将其删除。
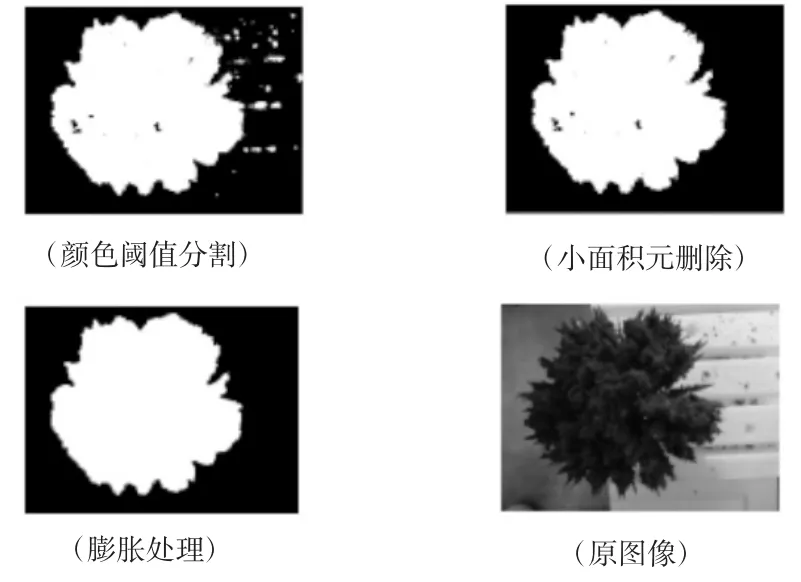
图2 图像预处理过程
2.2 无人机施药位置的路径规划
在图像预处理的基础上,采用质心点与屏幕中心点重合的方法,实现路径规划功能。具体规划方法如下:图像以左下角为原点,建立相对坐标系。将目标图像质心坐标与屏幕中心坐标提取出来,并利用公式1,将质心坐标与中心坐标的相对距离计算出来。见图3.

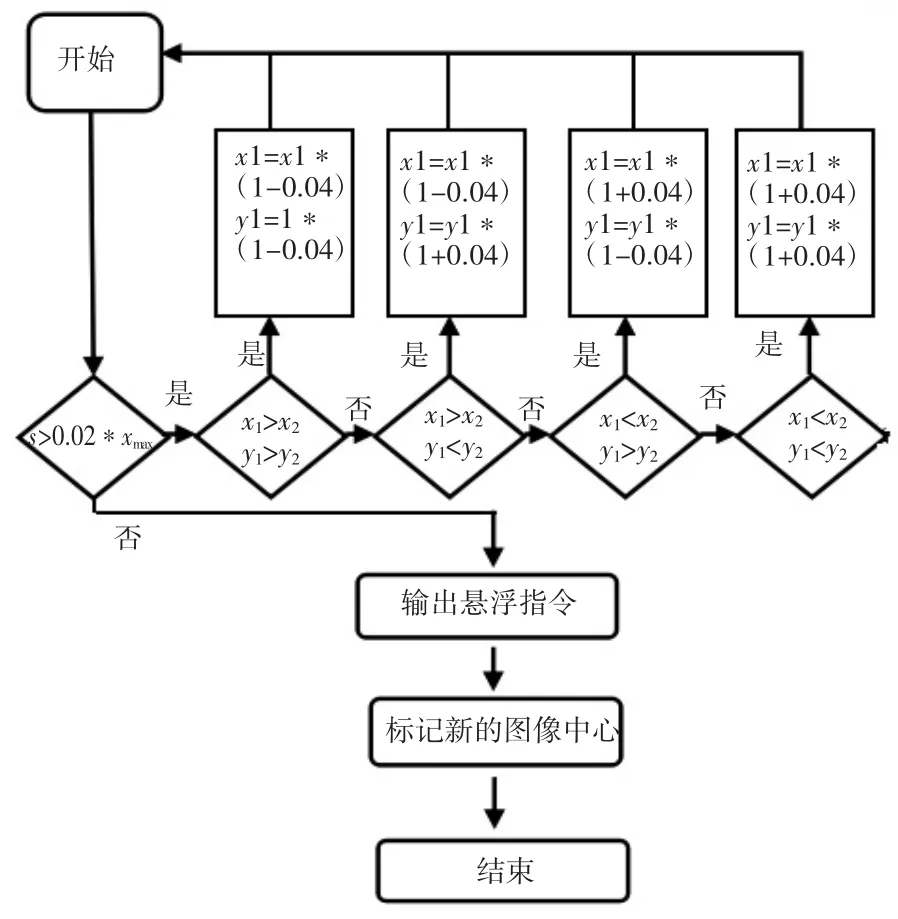
图3 果树中心标定与对位流程图
其中s为两点之间的距离,x1、y1为中心点的相对坐标,x2、y2为质心点的相对坐标。利用LABVIEW软件编写条件语句程序:若x1-x2>0,y1-y2>0,则对无人机输入向左下方移动的指令;若x1-x2>0,y1-y2<0,则对无人机输入向左上方移动的指令;若x1-x2<0,y1-y2>0,则对无人机输入向右下方移动的指令;若 x1-x2< 0,y1-y2< 0,则对无人机输入向右上方移动的指令。由于摄像机是逐帧拍摄的,则图片与图片之间存在时间滞后,因此中心点与质心点无法完全重合。对此,也为了节省识别时间,可以设定一个距离偏差范围|δ|,即当中心点与质心点的距离s处于该偏差|δ|的范围内时,可认为中心点与质心点基本重合。若s满足条件,则对无人机输入悬停指令。至此,下调无人机高度,通过调用MATLAB程序判断连通域的面积,若当面积达到预定值,则再次对无人机输入悬停指令。此时无人机所在的位置即预想的施药位置。
由于果树种植间隙大致相同,因此可以首先人工将无人机悬停至适当位置,随后通过识别系统进行识别,待识别完成后将无人机往某一方向固定飞行固定距离,此时无人机大致悬停在下一棵树的上方,对此再利用识别系统进行识别,以此不断重复即可实现无人机施药位置的路径规划。
2.3 确定施药高度
芒果树的树冠直径实际值是通过相机标定的方法获得的。在实际测量的过程中,由于受到地理条件约束,果园中的芒果树之间高度是大致相同的,因此只要大致设定无人机与树冠的高度,就可以不用考虑重新进行相机标定和相机畸变系数的影响。若想要使得相机标定的精确度越高,则需要处理的图片数量就要越多。处理的图片达到10张以上便可达到预期的效果。
通过图像预处理所获得的芒果树大致图像,可以利用LABVIEW软件进行芒果树实际直径的大致标定。其中,求取芒果树实际直径的方法如下:设芒果树图像相对面积为S′,绝对面积为S,无人机绝对高度为H,树木绝对高度为H′,根据预先设定的拍摄距离为H和H′相减,通过芒果树树冠的绝对面积S与相对面积S′确定比例关系k=S/S′,得到芒果树绝对面积S=S′×k.由于芒果树的绝对面积大小大致不变,因此可认为k的值也是大致保持不变。通过试验去测出k的值,进而确定芒果树的相对面积阈值范围,若图像中连通域的面积达到了该阈值范围,即可认为无人机达到了预想的施药高度。
3 实验分析
3.1 搭建实验平台
由于客观因素的限制,本文通过搭建实验台的方式进行模拟实验,如图4所示,具体实验方法如下:用树木模型代替真实树木,使用相机在适当高度拍摄树木模型的俯视图,之后将照片输入电脑中,利用MATLAB软件进行仿真模拟。利用IF语句判断出树木中心点与照片中心点的相对位置,然后利用While循环,通过坐标点移动代替现实中的无人机移动。本实验中规定每次移动的距离为图像横坐标最大值的4%.若两坐标点的相对距离s小于等于某一阈值范围,则停止循环,并输出悬停指令。由于每张相片的大小存在差异,其坐标的大小也存在着差异。在实验中规定s的阈值范围。通过记录循环次数N来模拟无人机飞行的次数。实验中,可以通过调整室内光线亮度去代替现实中的光照强度、更换树叶颜色代替不同季节的树叶颜色。
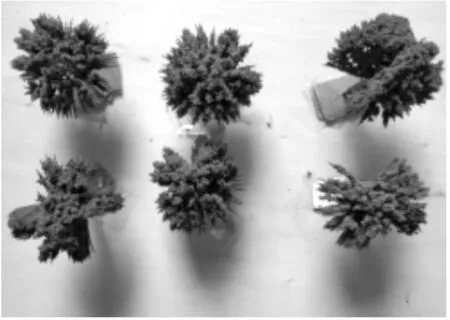
图4 实验平台搭建图
3.2 实验结果与分析
图像识别结果如图5所示,其中,加号为屏幕中心点,乘号为无人机农药弹投放点,黑点为树冠中心点。
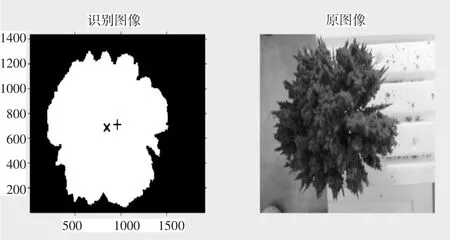
图5 图像识别结果图
通过对70棵树木模型进行实验分析,实验结果如表1所示。
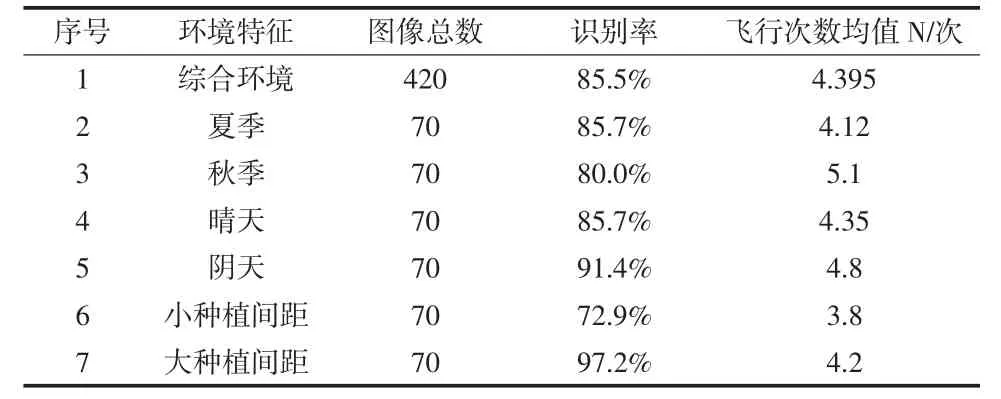
表1 实验结果
在本次实验过程中,一共选定了70棵芒果树模型进行测定,其中拍摄了420张照片,识别成功的照片有358张,正确率达到了85%以上。特别是在大种植间隙的情况下,其识别成功率更是高达97.2%.
从表1可以看出,在进行晴天与阴天环境模拟时,发现阴天环境下的识别率较晴天环境下的高,其原因是因为阴天环境下,背景干扰物的颜色较暗,在进行预处理的时候能较好的分割出来。同时,在进行小种植间隙类型果园的识别时,需将H分量的阈值范围缩小,从而避免图像在进行预处理时,主树木与干扰树木之间形成相同连通域,导致后续处理时出现误差。
4 结束语
通过图像识别方法,本文完成了芒果树的无人机施药的空间定位分析:
(1)通过HSV空间进行H值分割,去除了背景物的干扰,综合运用了多种图像处理方法,多次运用膨胀、删除面积元、质心标记等方法实现了较为理想的图像预处理。
(2)利用中心点重合的方法与相机标定的方法确定了无人机的施药位置,为实现无人机施药的自动化路径规划提供了可靠的依据。