活塞杆搬运机械手结构设计及运动学仿真
2018-08-04王宇钢
王宇钢,王 朝
(辽宁工业大学机械工程与自动化学院,辽宁 锦州121001)
活塞杆是油缸、气缸运动机构中的重要执行部件,用于支持活塞做功,是一个运动频繁、技术要求较高的运动部件。活塞杆基本特征是细长轴加工,其加工难度大,在加工过程中涉及工序繁多,其上下料基本依靠人工实现,劳动量大且效率低。
工业用机械手是机器人末端的操作机构,能模仿人手的动作功能,完成抓放材料、搬运物件或操持工具等工作[1]。使用机械手实现活塞杆加工的自动上下料,能有效降低生产成本,改善劳动工人劳动条件[2]。为促进活塞杆加工机械化,对机械手结构进行设计,采用SolidWorks软件对活塞杆搬运机械手进行三维造型,并进行仿真研究,验证机械手设计的合理性。
1 活塞杆搬运机械手工作原理
针对机械手的工作要求,设计的搬运机械手安装在机床上方的空架桥滑动导轨上,可沿水平方向移动,为整机移动式。手部安装于气缸的活塞杆上,手部可以上下移动,手部的抓紧动作是由一小气缸驱动。搬运机械手的功能是搬运活塞杆工件运送至指定地点,要求手爪能够闭合和张开,从而抓住或释放活塞杆。
机械手的手爪是最重要的执行机构,是实现夹持动作的部件。机床常见的机械手爪,按其握持工件的原理,可分为夹持式和吸附式两种。在夹持式中,按夹持工件的部位,可分为外夹型和内撑型。由于活塞杆属于细长轴类零件,在运输中机械手爪所夹持的部位为活塞杆外圆表面,因此选用夹持式外夹型手部结构。设计的手部机构如图1所示。
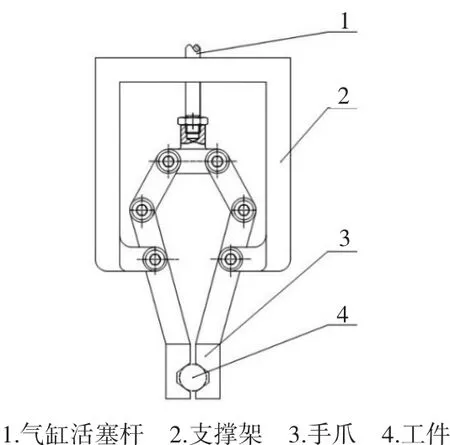
图1 夹持式手部结构原理图
手部机构工作原理为手爪由气缸活塞杆驱动多杆机构使手爪回转,夹持工件。其特点是承载能力较大、机构可自锁、夹持对象适用于轴、齿轮、盘类等零件。机械手的驱动装置是使手爪实现开、闭动作的动力装置,常见的有液压、气压、机械、电气等。根据机械手工作要求和负载分析,活塞杆搬运机械手选用气动驱动方式。
2 结构设计及三维建模
根据活塞杆搬运机械手原理分析,在Solid Works 2013绘图软件中进行三维实体造型,然后通过装配模块完成各零件的组装,机械手手部三维模型如图2所示[3]。
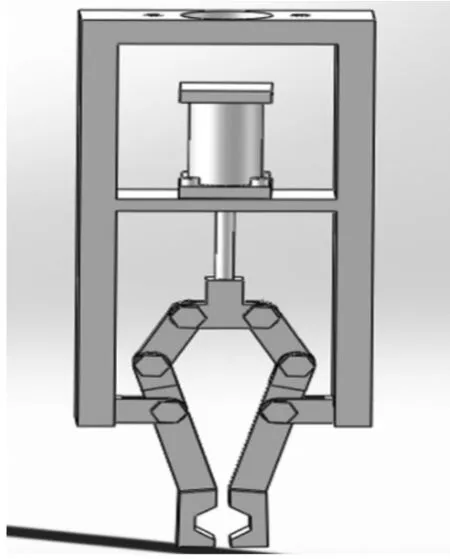
图2 活塞杆搬运机械手三维图
为进一步提高机械手的工作效率,设计时将三个活塞杆搬运机械手机构并列地安置在机床上方的支撑架上,活塞杆搬运机械手整机机构方案如图3所示。

图3 机械手整机机构三维图
整机支撑架4依靠水平滑动导轨2导向,在驱动气缸1的作用下沿水平方向整机移动。机械手支撑架竖直方向上的升降运动采用竖直方向驱动气缸3提供动力进行升降,采用直线轴承与滑柱5进行导向。此处所设计的机械手整机水平方向上的平均速度较小,水平方向上移动时产生的惯性力和惯性力矩较小,故采用在闭式滑轨上侧部位安装机械挡块6进行定位。三个机械手从右到左分别对应活塞杆加工时上料,加工,下料三个工位,这样布置可实现同一时间内,执行一次夹持动作完成三个工件在三工位上的搬运,能够极大地提高工作效率。机械手的上下运动、左右移动和夹紧、松开均用电磁换向阀控制相应气缸的动作来实现。
3 运动仿真分析
机构运动仿真技术就是通过对机构添加运动副、驱动器,使其运动起来,实现机构的运动模拟。机构运动仿真可以在任意时刻查看各个组成部件的位置、位移、速度、加速度、运动干涉等参数并加以分析,根据结果调整模型设计,以达到最优的零件机构配置[4]。
进入SolidWorks/motion模块设置运动环境,进行运动仿真。根据活塞杆搬运机械手整机工作情况,定义机械手的初始位置,以此作为运动仿真的起始位置;分别设置5个伺服电机的速度,然后新建一个仿真分析,分别设置仿真时间、电机运动次序以及仿真类型后,点击“运行”按钮即可开始仿真[5-6]。
仿真结束后保存获得的仿真结果,对活塞杆搬运机械手整机各部件的位移、速度、加速度进行分析。机械手手部运动曲线、机械手整机水平运动曲线及机械手整机竖直运动曲线分别如图4、5、6所示。

图4 机械手手部运动曲线
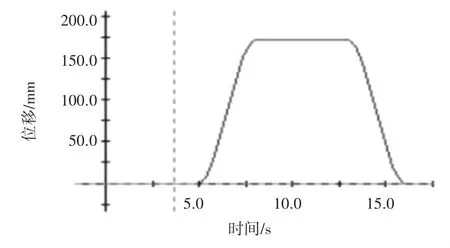
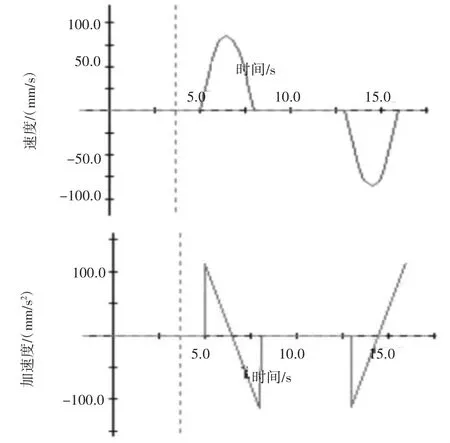
图5 机械手整机水平运动曲线图
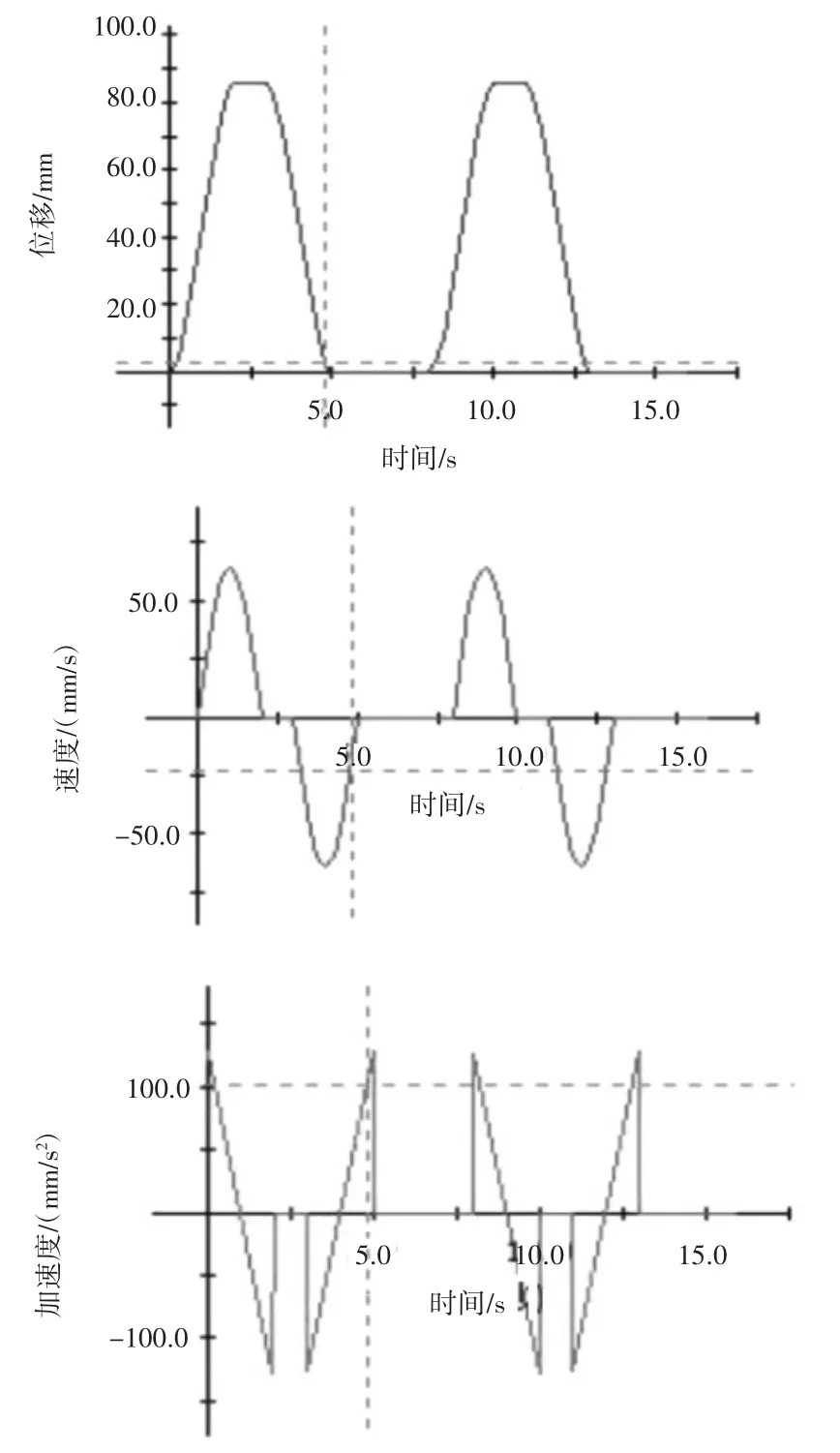
图6 机械手整机竖直运动曲线图
分析仿真运动曲线图可以发现,机械手手爪在夹紧与松开的时候,加速度有突变,且夹紧时加速度突然增大,松开时加速度减小,但加速度大小平均值为0.01 m/s2,表明手爪惯性力和惯性力矩较小。
由图5可知机械手整机水平方向上运动的行程为0.18 m,平均移动速度为0.08 m/s,单行程运动时间为6 s.
由图6可知机械手整机竖直方向上运动的行程为0.085 m,平均移动速度为0.03 m/s,单行程运动时间为3.8 s.
仿真结果显示,机械手整机运动平稳,位移曲线光滑、结构各部件无干涉。机械手整机机构的水平方向、竖直方向升降速度均较小,故机械手在运动过程中产生的惯性力和惯性力矩较小,即机械手的动载荷较小,通过运动分析所设计的机械手的导向机构及定位均满足工作要求。仿真结果可为活塞杆搬运机械手实际研制提供参照。
4 结束语
通过对活塞杆加工工艺的分析,设计了搬运机械手的总体方案,用SolidWorks软件建立三维实体模型并在指定的负载等参数下进行仿真。通过仿真得到了机械手的运动仿真动画及运动参数曲线。仿真结果表明设计的机械手结构运行平稳,能有机地结合在一起工作,达到了预期目标。同时仿真得到的运动和结构参数可为物理样机的设计制造提供参考依据,可有效缩短开发周期并降低设计成本。