基于电机/液压制动系统协同控制的电动汽车稳定性控制研究*
2018-08-03吴科甲吴乙万陈正强
吴科甲,吴乙万*,李 凡,陈正强
(1.福州大学 机械工程及自动化学院,福建 福州 350116;2.湖南大学 汽车车身先进设计制造国家重点实验室,湖南 长沙 410082)
0 引 言
汽车电子稳定性控制系统(ESC)对于提高车辆的主动安全性具有重要意义。分布式驱动电动汽车是可独立控制4个车轮的驱动力和制动力的新能源汽车,其具有轮毂电机输出转矩响应快、实时性好、精准可控的优点,但其峰值转矩受电机本身特性和电池荷电状态的约束,无法满足极限工况的需求[1]。电控液压制动系统能产生较大的制动力矩已被广泛用于车辆稳定性控制,但响应较慢[2]。而轮毂电机和液压制动系统协同控制则可利用二者的优点提升极限工况下车辆稳定性控制效果。
国内外研究人员已对正常制动工况中基于轮毂电机与液压制动系统协同控制的电液复合制动进行了大量研究[3-5],主要采取先电机控制后液压补偿的控制策略。在极限工况下,车辆失稳过程的持续时间短,稳定性控制系统应及时介入并对车辆运动状态进行合理干预。因此,电液复合制动采用的“先电机后液压”策略解决了存在响应时间长的不足问题,适用于车辆稳定性控制。文献[6]以改善车辆稳定性为目标,设计了轮毂电机与液压制动系统联合控制策略,并采用二次规划法进行转矩优化分配,但轮毂电机与液压制动系统始终处于共同工作状态;文献[7]针对分布式电动汽车提出的电液协同控制策略为:在电机饱和之后再将车辆稳定性控制所需施加的纵向力分配到液压系统;文献[8-9]对比分析电机转矩平均分配与最优分配的控制效果,在液压制动方面采用单轮制动的方式,未考虑液压制动时各轮缸间的最优分配。
本文以电液协同稳定性控制系统为研究对象,在极限工况下协调控制轮毂电机和液压制动系统,并对电机转矩和液压制动力矩进行双重优化分配。
1 车辆稳定性控制系统设计
1.1 控制系统结构
基于电机/液压制动系统协同控制的稳定性控制系统采用分层控制结构,如图1所示。
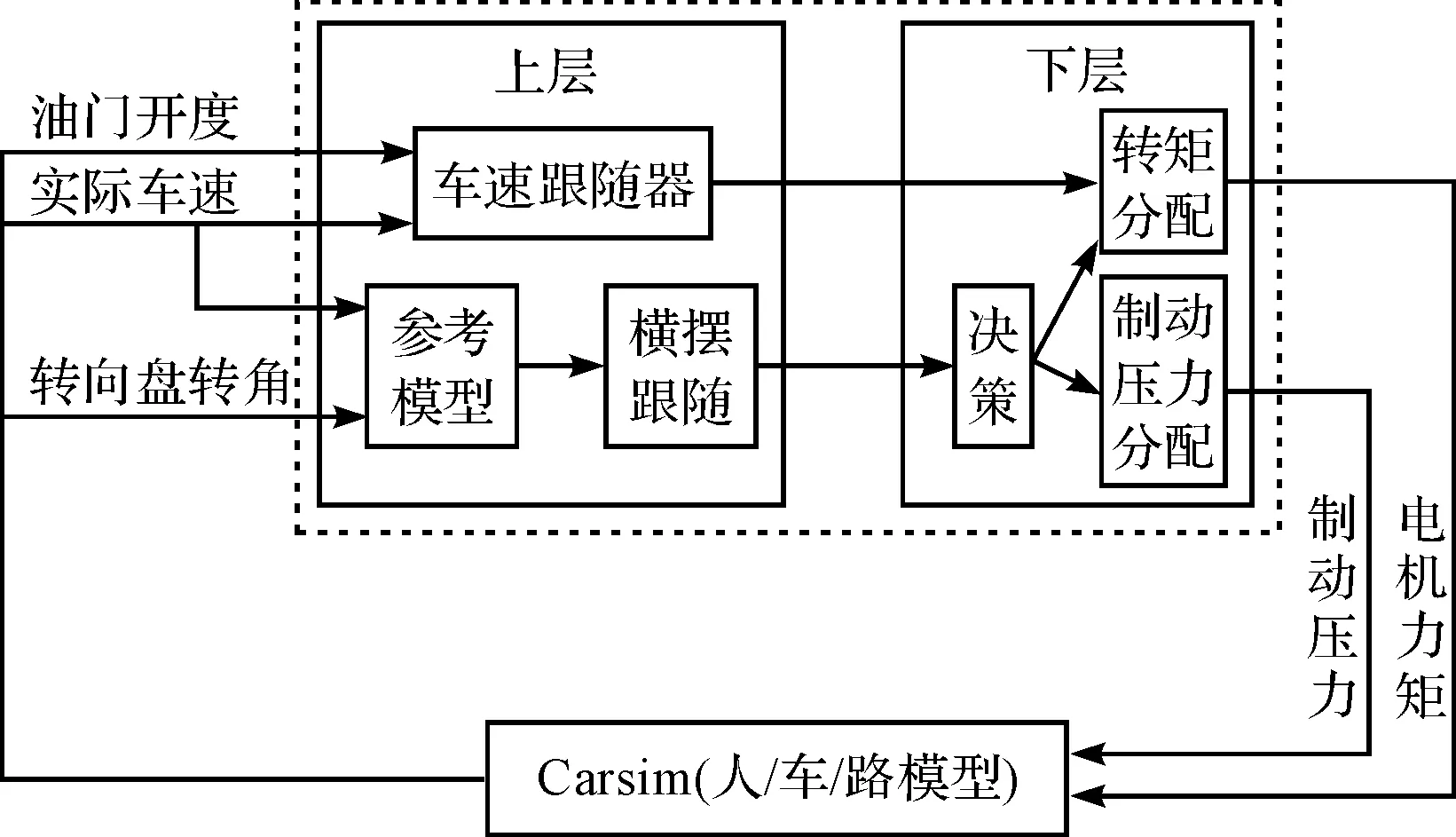
图1 整车稳定性控制策略
上层运动控制器包含参考车辆模型、车速跟随模块、运动跟踪模块。参考模型主要根据路面附着条件、车辆运动状态和驾驶员转向输入计算期望的车辆运动规划;车速跟随模块根据由油门开度决定的理想车速和实际车速计算出车速跟随所需的纵向力;横摆跟随模块采用模糊PI控制产生所需的附加横摆力矩。下层控制分配器包含协同控制决策模块、电机转矩控制分配模块、制动压力控制分配模块。协同控制决策模块根据车辆行驶状态实时进行纯电机控制和电机/液压制动协同控制决策;电机转矩控制分配模块根据车速跟随模块和协同控制模块的计算结果采用最优控制分配方法进行四轮轮毂电机驱/制动转矩分配;制动压力控制分配模块则在协同控制决策的基础上进行四轮制动压力的最优分配。
1.2 运动控制器
1.2.1 参考车辆模型
本研究选用2自由度单轨车辆模型作为横摆力矩的控制模型[10],其状态方程为:
(1)
(2)

对于2自由度参考车辆模型,根据前轮转角、车速和车辆结构参数,可计算出理想的横摆角速度γidel为:
(3)
考虑到路面附着条件的限制,横摆角速度的上限值为:
(4)
式中:μ—路面附着系数。
因此,期望的横摆角速度为:
γdes=min(|γidel|,|γupper-bound|)sgn(γidel)
(5)
1.2.2 车速跟随模块
由油门开度决定的理想车速vx-ideal和实际车速vx的偏差Δvx为:
Δvx=vx-vx-ideal
(6)
根据车速偏差Δvx,采用PI控制算法计算车速跟随所需的纵向力∑Fx为:
(7)
式中:kp—比例常数;ki—积分常数。
1.2.3 横摆跟随模块
采用模糊PI算法控制跟踪横摆角速度可获得车辆稳定性控制所需的辅助横摆力矩[11-12]。实际横摆角速度γ与期望横摆角速γdes的差值Δγ为:
Δγ=γ-γdes
(8)

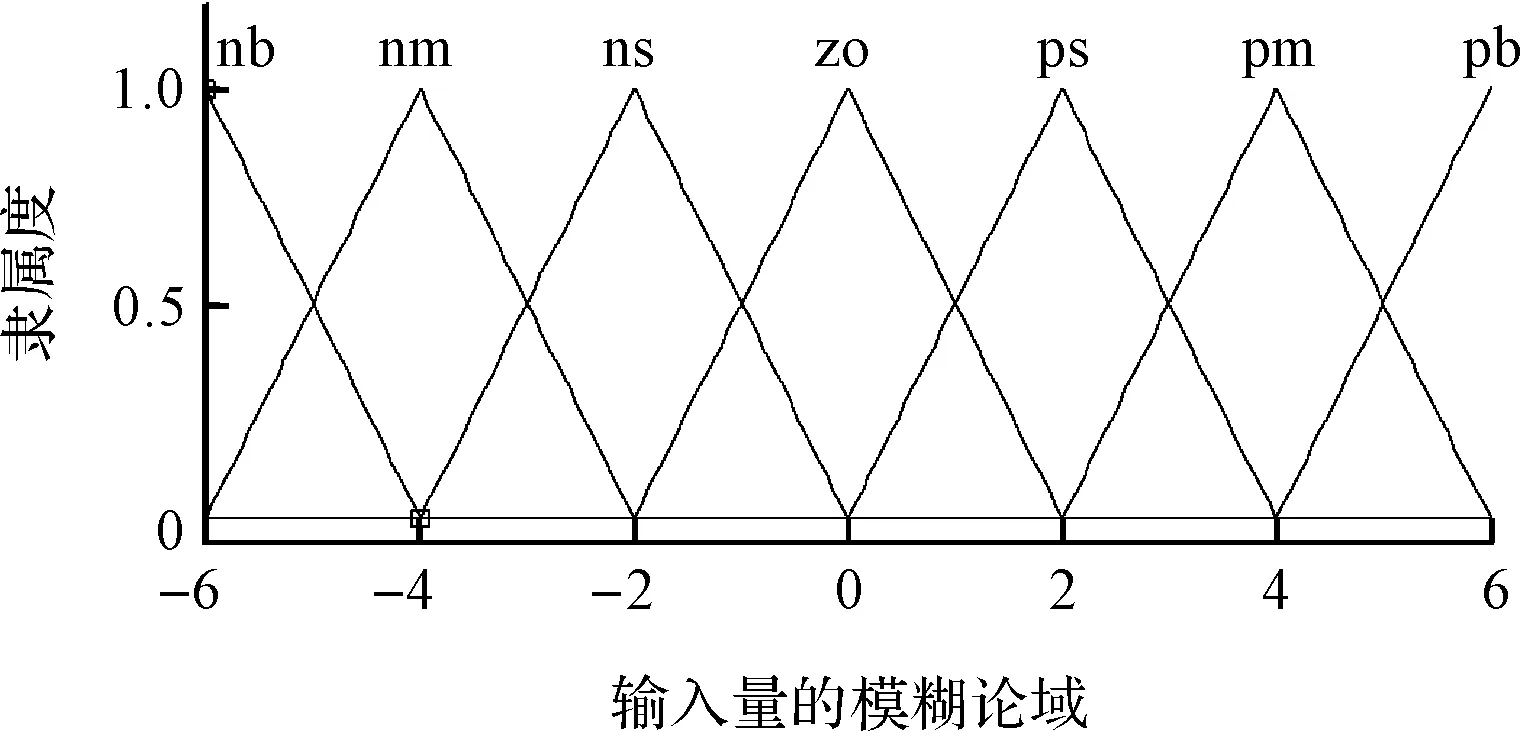
图2 Δγ和的隶属度函数
输出的隶属函数为高斯型,如图3所示。
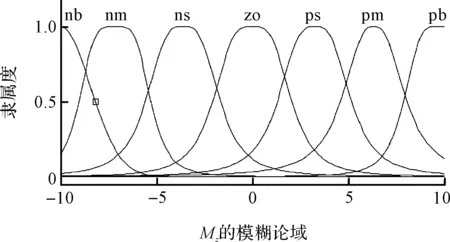
图3 Mz的隶属函数
模糊控制规则如表1所示。
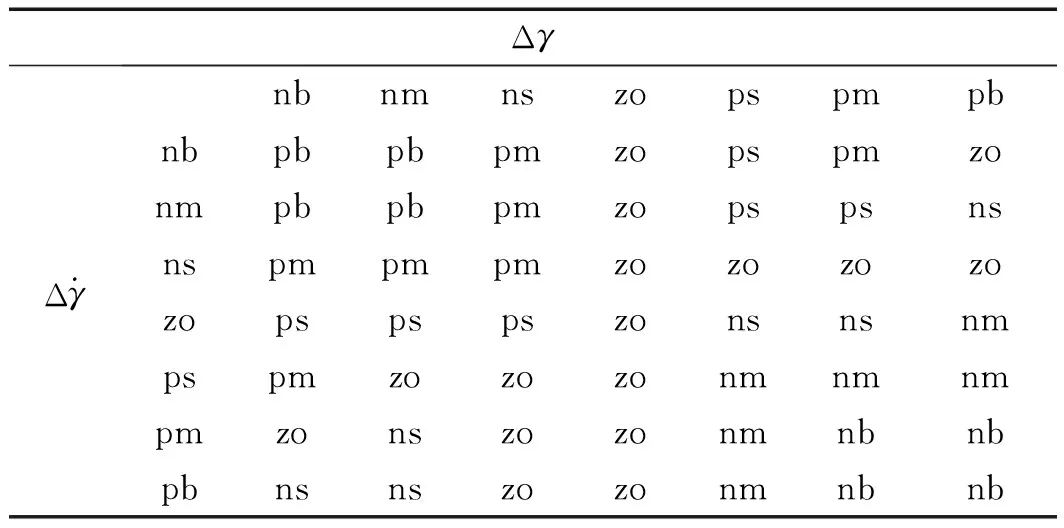
表1 模糊控制规则
本文模糊控制方法为‘Mamdani’法,用‘max-min’法作为推理机的推理方法,以面积重心法为去模糊方法。
1.3 控制分配器
1.3.1 协同控制策略
分布式驱动电动汽车可通过主动控制四轮轮毂电机驱/制动转矩和液压制动系统差动制动控制产生附加横摆力矩主动干预车辆运动状态。本研究根据车辆运动状态、辅助横摆力矩(Mz)和电机特性进行协同控制决策。
具体策略如图4所示。
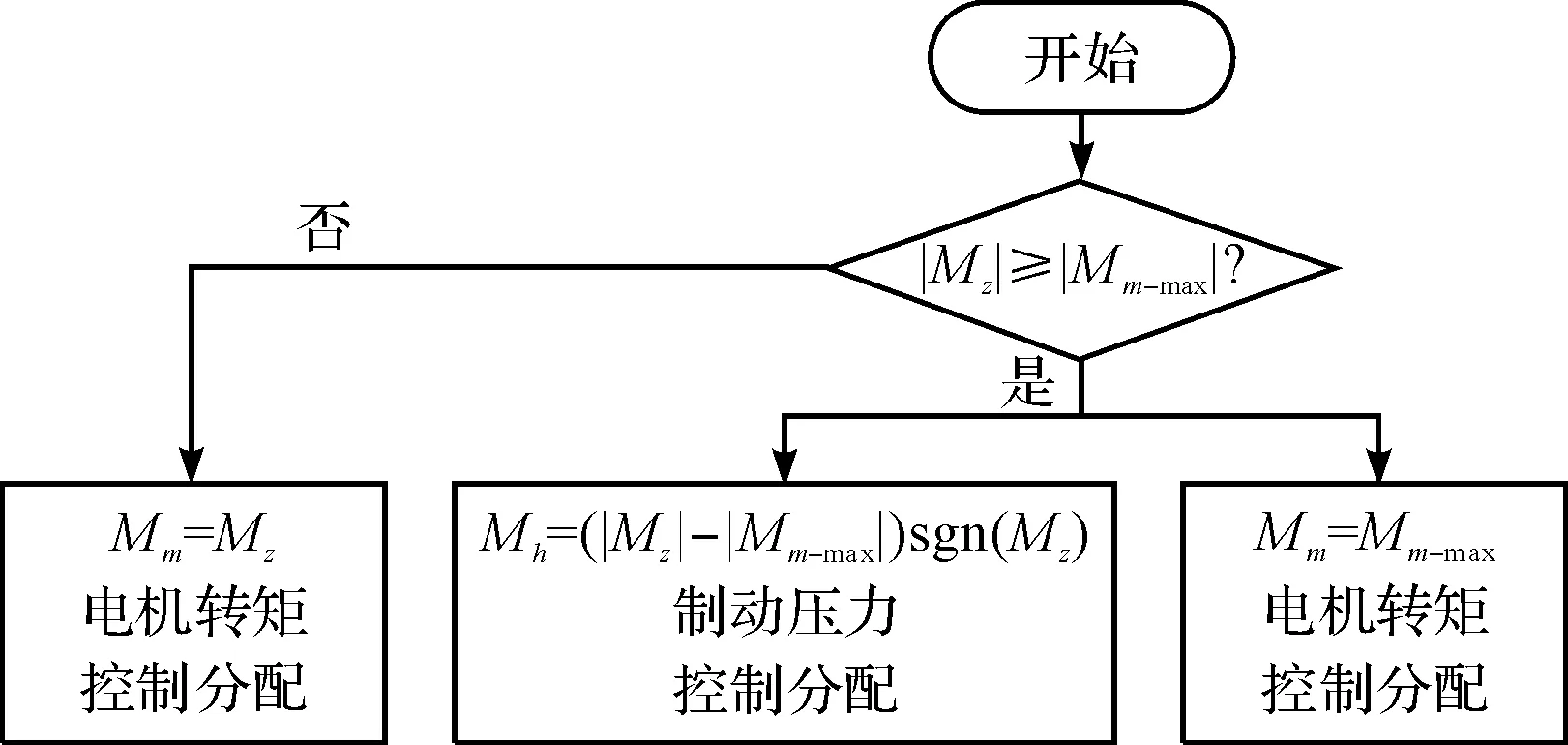
图4 协同控制策略图Mm-max—当前车速下主动控制四轮轮毂电机输出转矩所能提供的最大横摆力矩;Mm—需电机转矩主动控制产生的辅助横摆力矩;Mh—需电控液压制动系统产生的补偿横摆力矩
该策略优先选择由主动控制轮毂电机输出转矩进行稳定性控制,当轮毂电机转矩控制达到当前转速下电机所能提供的最大驱/制动转矩后仍无法产生车辆稳定性控制所需要的附加横摆力矩,则由电控液压制动系统进行差动制动控制实现剩余的辅助横摆力矩需求。为提高控制效果,笔者采用最优控制分配方法进行目标电机转矩和制动压力的最优分配。
1.3.2 电机转矩控制分配
电机转矩控制分配的首要目标是,将车速跟随所需的纵向力∑Fx和协同控制决策模块计算出的Mm通过控制分配方法优化分配给4个轮毂电机,同时考虑路面附着状况和轮毂电机工作特性的约束条件:
(9)
式中:lw—轮距;Tfl,Tfr,Trl,Trr—前左轮、前右轮、后左轮、后右轮轮毂电机的输出转矩;rw—车轮半径;Mm—单纯由电机所能辅助横摆力矩。
令广义力Vm=[∑FxMm]T,控制量为4个轮毂电机输出转矩,Um=[TflTfrTrlTrr]T,则可将式(9)改写为:
Vm=BmUm
(10)
式中:Bm—效率矩阵,
车辆受到的约束条件为:
Ti-dmin≤Ti≤Ti-dmax
(11)
(12)
式中:下标i—fl、fr、rl、rr用于表示前左轮、前右轮、后左轮、后右轮;Ti-电机输出转矩;Ti-dmin—单个轮毂电机在当前轮速下所提供的最大制动力矩;Ti-dmax—单个轮毂电机在当前轮速下所提供的最大驱动力矩;Fxi,Fyi,Fzi—轮胎纵向力、侧向力和垂向载荷。
由上下界表示的轮胎力约束条件为:
Ummin≤Um≤Ummax
(13)
车辆的约束条件如图5所示。
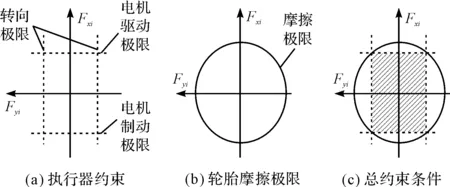
图5 车辆的约束条件
根据电机转矩分配目标,可将该优化问题描述为加权最小二乘问题(weighted least-squares,WLS):
(14)
(15)
(16)
式中:ε—权重系数,ε=1 000 000。
考虑载荷转移对四轮垂向载荷的影响,有
(17)
(18)
(19)
(20)
Fz-sum=Fzrfl+Fzfr+Fzrl+Fzrr
(21)
式中:ax,ay—车辆纵、侧向加速度;mh,mw—簧载质量和单轮非簧载质量;lw—轮距;h—质心高度;Fzfl,Fzfr,Fzrl,Fzrr—左前、右前、左后、右后轮垂向载荷;Fz-sum—整车载荷。
笔者采用有效集算法进行电机转矩最优分配求解[13]。
1.3.3 制动压力控制分配
制动压力分配首要目标是通过合理分配4个轮缸制动压力使产生的横摆力矩尽可能地接近补偿横摆力矩Mh,次要目标是轮缸制动压力应尽可能小使车辆有足够的侧向稳定裕度。进行最优分配时应考虑路面附着条件约束和执行机构的物理限制。
补偿横摆力矩Mh与四轮制动压力的关系为:
(22)
式中:Kbf,Kbr—由制动摩擦面积、摩擦系数和制动器半径等共同确定的前、后轮制动效能因数。
令广义力Vh=Mh,控制量为4个轮缸制动压力Uh=[PflPfrPrlPrr]T,则可将式(21)改写为:
Vh=BhUh
(23)
式中:Bm—效率矩阵,Bh=[Kbf-KbfKbr-Kbr]Tlw/2rw。
考虑液压系统的响应速率则液压制动力矩的上下限为:
(24)
综合考虑摩擦圆约束和制动系统的约束则车辆受到的约束条件为:
Uhmin≤Uh≤Uhmax
(25)
根据制动压力分配目标,可将该优化问题描述为加权最小二乘问题:

(26)
式中:Wuh=Wum;Wvh=Wvm;—权重系数;=1 000 000。
同理,采用有效集算法进行制动压力最优分配求解[13]。
2 仿真与结果分析
为验证所设计的稳定性控制系统,本研究基于Carsim/Simulink联合仿真平台,根据国家标准GB/T 30677-2014的规范进行正弦停滞转向试验[14-15]。笔者选取的转角幅值分别为90°、150°、300°。整车参数以及转角输入分别如表2及图5所示。
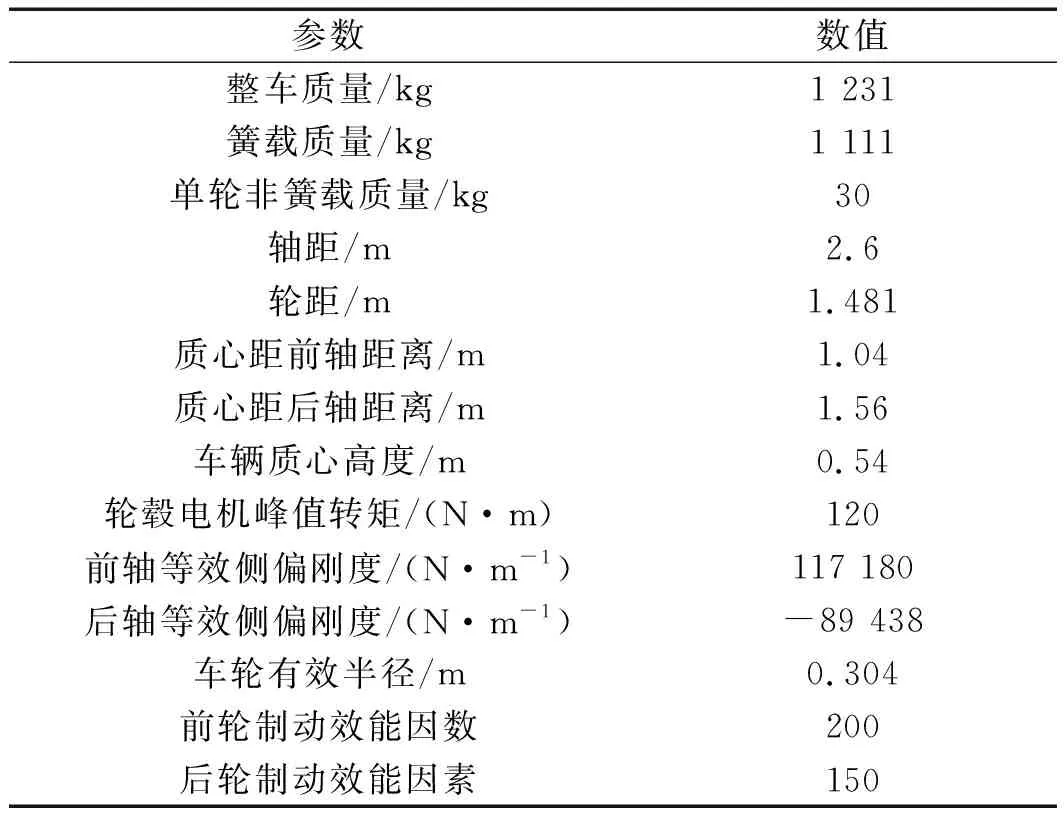
表2 车辆参数

图5 转向盘转角输入
2.1 仿真工况一
车辆在附着系数0.9的高附路面以80 km/h的速度行驶,以0.7 Hz的频率进行转向盘正弦输入增加到90°,在第2个波峰处保持500 ms后回正。
转向盘转角为90°输入仿真结果如图6所示。
根据图6(a)可知:无论是采用无控制、纯电控制、电液协同控制方式车辆的横摆角速度均能有效地跟踪期望值,且在转向盘转角输入结束后1 s及1.75 s车辆横摆角速度均小于峰值的35%、20%完全满足法规要求。根据图6(b)可知:3种方式下车辆的质心侧偏角均控制在线性可控区域内,即车辆保持稳定;对于整车质量小于3 500 kg的车辆,GB/T 30677-2014规定在开始转向1.07 s后的车辆侧向位移应满足Y1.07s≥1.83 m;由图6(c)可看出:3种方式均能满足;根据图6(d,e)可看出:电机转矩分配模块能进行四轮轮毂电机输出转矩的有效分配。
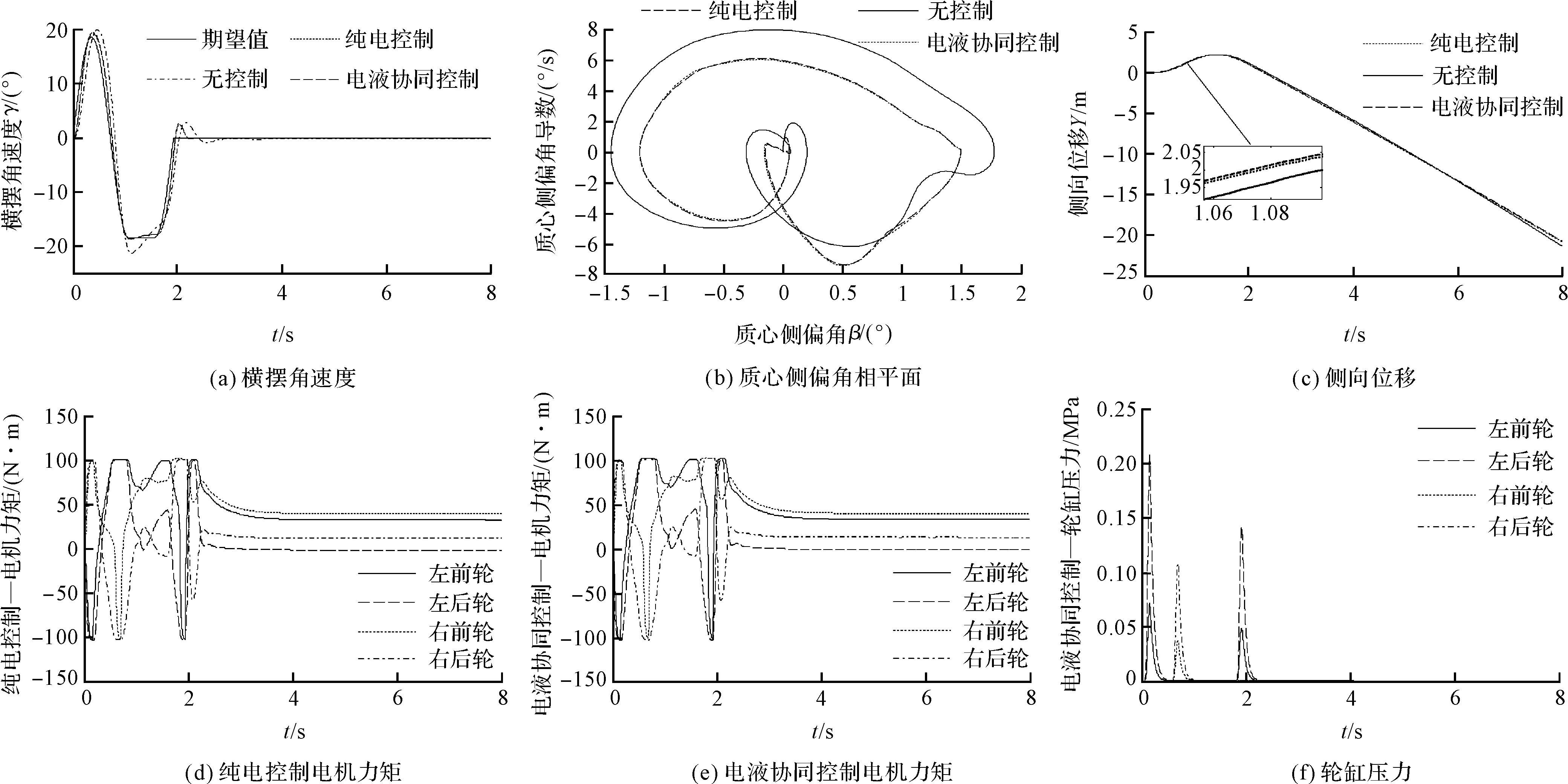
图6 转向盘转角为90°输入仿真结果
综上所述:当正弦延迟工况转向盘转角幅值为90°时,3种方式下车辆均能满足法规要求,但纯电控制和电液协同控制的效果较佳。
2.2 仿真工况二
车辆在附着系数0.9的高附路面以80 km/h的速度行驶,以0.7 Hz的频率进行转向盘正弦输入增加到180°,在第2个波峰处保持500 ms后回正。
转向盘转角为180°输入仿真结果如图7所示。

图7 转向盘转角为180°输入仿真结果
由图7(a)可知:当转向盘转角幅值增加到180°时,无控制的车辆的横摆角速度无法有效跟踪其期望值,而采用纯电控制和电液协同控制的车辆均能有效跟踪期望横摆响应;由图7(b)可知:无控制的车辆的质心侧偏角相平面收敛但值较大,车辆失稳,而采用纯电控制和电液协同控制的车辆的实际质心侧偏角相平面均处在较小范围内,质心侧偏角控制在线性可控区域内,车辆保持稳定;由图7(d,e)可知:转向过程中电机输出转矩均出现饱和现象;由图7(f)可知:制动压力控制分配模块能有效地分配四轮轮缸制动压力产生补偿横摆力矩。综上,由图7(b)由质心侧偏角相平面图可看出:采用电液协同控制车辆的稳定性最佳。
2.3 仿真工况三
车辆在附着系数0.9的高附路面以80 km/h的速度行驶,以0.7 Hz的频率进行转向盘正弦输入增加到300°,在第2个波峰处保持500 ms后回正。
转向盘转角为300°输入仿真结果如图8所示。
图8 转向盘转角为300°输入仿真结果
由图8(a)可知:当转向盘转角为300°时,只有电液协同控制的车辆能有效地跟随期望横摆角速度但且能满足法规对横摆角速度的要求;由图8(b)可知:无控制的车辆的质心侧偏角相平面发散不收敛,车辆失稳,纯电控制、电液协同控制的车辆质心侧偏角处于相对较小的范围内;结合图8(a)可知:纯电控制的车辆的横摆角速度最后虽然回正但延迟现象明显;由图8(c)可看出:电液协同控制的车辆的侧向位移比其他方式的小;由图8(d,e)可看出:电机转矩分配模块能及时控制4个轮毂电机的输出转矩进行稳定性控制,但受电机特性限制,均出现转矩饱和的现象。
综合图8可知:制动压力分配模块能有效地进行轮缸制动压力最优分配产生适当的纵向力,满足车辆所需补偿横摆力矩。
3 结束语
本文提出了电机/液压制动系统协同控制的电动汽车稳定性控制方法,在正弦延迟工况下得到仿真验证,仿真结果表明:
(1)在常规工况下单独电机控制即可使车辆稳定行驶,在极限工况下电机/液压协同控制可有效提高车辆的行驶稳定性;
(2)电机/液压协同控制策略采用双重最优分配的方法,能充分发挥电机和液压的优势,可使车辆具有良好的动力学稳定性;
(3)该稳定性控制方法是基于现有的分布式驱动技术、ABS/ESP的执行机构实现的,因而更容易与现有系统集成,并具有较高的可靠性。
