弹性外骨骼机器人髋关节设计与分析*
2018-08-03朱见平王昊旭
裴 翔,朱见平,王昊旭
(1.浙江工业大学 机械工程学院,浙江 杭州 310000;2.三联集团 上海申磐产业公司,上海 200120)
0 引 言
可穿戴外骨骼机器人的髋关节设计极大地影响着整体穿戴的效果[1]。美国洛马公司的HULC负重外骨骼机器人,采用液压驱动的三自由刚性髋关节[2-3],并以此技术研发了下肢康复外骨骼机器人EKSO[4];日本筑波大学也开发出了世界上第一款全身式助力外骨骼机器人HAL-5[5];以色列也开发出了自己的下肢助行康复外骨骼机器人REWALK[6-7];浙江大学基于HULC设计了一款液压驱动下肢外骨骼机器人[8],其髋关节为刚性串联三自由度设计,在穿戴时明显对人体行走造成干扰;新西兰的REX下肢康复外骨骼机器人更是在行走时,大腿无法完成外展,其在髋关节处仅设计了一个自由度;电子科技大学设计的外骨骼机器人在行走时人体无法自行转向[9]。
在上述外骨骼机器人中,美国的HULC在实际使用时,其髋关节的刚性太强,在行走时影响到了人体大腿的外展与外旋;EKSO简化了HULC的设计,与REWALK一样用于康复领域,在髋关节处仅设计了一个主动自由度,在实际使用时会对人体正常的步态造成干扰;HAL-5是目前人体耦合性最好的,但其结构设计精巧复杂、成本高昂。
在分析了各外骨骼的优缺点后,本文将设计一款三自由度弹性外骨骼机器人髋关节,并使用MPU6050多轴加速度传感器采集人体大腿在穿戴前后各方向上的运动角度,进行对比以验证该设计的可行性。
1 人体髋关节活动分析
髋关节作为一种典型的球关节,其基本的运动为:矢状面内的屈/伸运动,其表现形式为人体的前进与后退;额状面内的外展/内收运动,以保持人体平衡;水平面内的外旋/内旋运动,其表现为人体的转弯运动。依据相关资料,得到的髋关节的运动范围如表1所示。

表1 人体髋关节运动范围
外骨骼机器人的结构设计要做到以下两点:(1)为达到行走助力的设计要求,外骨骼机器人在矢状面内的屈/伸运动就应设计为主动自由度,即需要有外部的驱动力来进行助力;(2)髋关节为实现拟人化设计,应设计为三个自由度。
结合对人体行走过程的分析,发现这两个方向上的运动并不是主要的耗能运动,因此为简化结构,将此两个运动设计为被动的自由度,不添加外部驱动。
本次在设计的外骨骼机器人时,考虑到实际使用场景仅为平地行走助力,所以髋关节各方向上的运动范围并不是与髋关节本身的运动范围一致。本次设计的外骨骼机器人髋关节各方向的运动范围如表2所示。
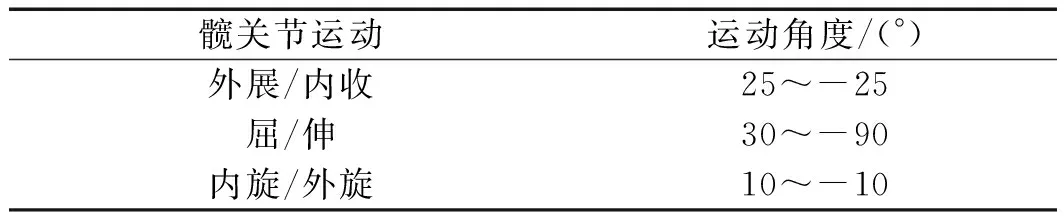
表2 本次设计的外骨骼机器人髋关节运动范围
2 外骨骼机器人髋关节结构设计
目前的外骨骼机器人都采取拟人化设计,即关节设计与人体的关节尽可能保持一致。而人体的髋关节是一个结构复杂的系统,一般都将其近似为一个球关节[10],也就是髋关节具有3个自由度。在设计髋关节的时候,其结构形式基本上分为两类:串联型与并联型[11-12]。本研究采用的也是串联型,但在设计髋关节的额状面与水平面内的自由度时,而是联想到弹性体可弯曲、扭转同时也能承重的特性,设计一块弹性体,并用该零件实现髋关节的两个被动自由度,从而简化髋关节的结构设计。
本次设计外骨骼机器人髋关节的示意图如图1所示。

图1 外骨骼机器人髋关节示意图1-弹性体;2-腰部连接件;3-腿部连接件
在设计外骨骼机器人髋关节的另外两个被动自由度时,考虑弹性体所具备的双向弯曲与扭转的特性。弹性体在受压时,由胡克定律可知:其被压缩量越大,自身的内力也越大,表现出来的形式为运动方向上的阻力也就越大。由前文可知:髋关节的被动关节分别是额状面内的外展/内收和水平面内的外旋/内旋,这两个被动自由度正好可以分别对应弹性元件的双向弯曲与扭转的特性,同时,弹性元件还可以承重与传递载荷,所以理论上可以用弹性元件来设计髋关节的这两个被动自由度。
3 髋关节橡胶板设计与分析
3.1 弹性连接板的尺寸设计
根据橡胶弹性物理学[13],橡胶板的弯曲角度设计为-45°~45°,扭转角度为-30°~30°。本研究在进行弯曲分析时,根据理论力学[14],将该弹性体看作是一个悬臂梁,人体侧方向上的力作用在弹性体上时,可以近似的看作是均匀分布的力。弹性体弯曲的力学简图如图2所示。
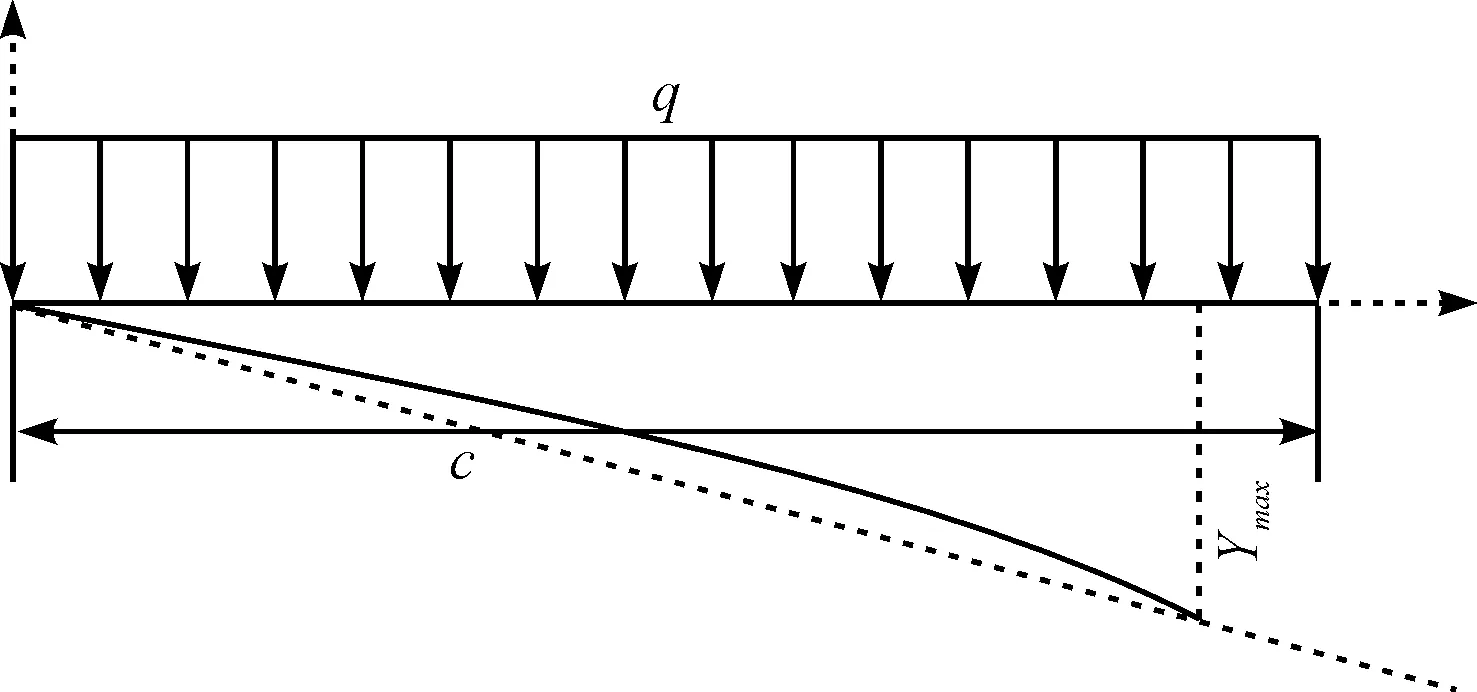
图2 橡胶板弯曲力学简图
设计用a表示弹性体的宽度,b表示弹性体的厚度,c表示弹性体的高度。根据材料力学[15],可得:
(1)
式中:Ymax—板材的最大线位移,cm;q—板面所受均布载荷,N/cm;l—板的长度,cm;E—材料的弹性模量,N/m2;I—截面的转动惯量,cm4。
再进一步引入最大偏移量:
Ymax≤csin45°
(2)
对于外力,有:
(3)
式中:m—下肢重量,kg;L1—下肢重心与髋关节距离,cm。
联立式(1~3),最终可得:
3mgL1c≤Eab3sin45°
(4)
式中:E—弹性模量,E=6.1×106N/m2=610 N/cm2;g—重力加速度,9.8 m/s2;m=10.7 kg;L1=53.2 cm。
代入数据,最终有:
28.8c≤ab3
(5)
又根据扭转特性可知:
(6)
对于式(6)中的转矩T有:
(7)
式中:m—背部模块的总重,设计为7 kg;g—重力加速度;L2—背部重心到扭转中心的距离,设计为15 cm;
同时考虑到设计的髋关节减速器安装板的尺寸,选定宽度a=7 cm。代入式(6)可得:
b≤0.48c
(8)
联立式(5,8),可得:c≥7.5,b≤3.6。
3.2 髋关节实物加工
由于橡胶板的厚度对自身的弯曲与扭转有很大的影响,故分别取b=3.0 cm、2.5 cm进行应力分析。本研究通过Solidworks自带的Simulation应力分析模块,得出厚度为3 cm的橡胶板在静力与动力下的变形都较厚度为2.5 cm的橡胶板小,说明3 cm厚的橡胶板刚性更好。本次设计的髋关节需要在变形较小的情况下具有一定的弹性,所以选择厚度为2.5 cm,高度c为7.5 cm,宽度a为7 cm。
外骨骼髋关节的实物图如图3所示。

图3 外骨骼机器人髋关节实物图
3.3 实验及结果分析
本次实验采用MPU6050多轴加速度传感器进行数据采集实验。笔者按照给定的程序,将传感器连接到STM32F407开发板上,并通过USB接口,将传感器采集的数据导入Mtalab中,将传感器采集到的数据绘制成一条曲线。
首先笔者将传感器绑在人体大腿外侧,其X轴指向与人体大腿方向平行,直行一段距离,采集未穿戴所设计的外骨骼时的角度数据,利用Matlab,拟合出一条行走步态曲线图。再穿戴好设计加工出的外骨骼髋关节,将传感器固定于外骨骼上,其X轴指向与外骨骼大腿方向平行,直行一段距离,采集穿戴后的数据,利用Matlab,拟合出一条行走步态曲线图。穿戴前后的曲线图绘制到同一坐标下,得到关节活动角度对比图,如图(4~6)所示。
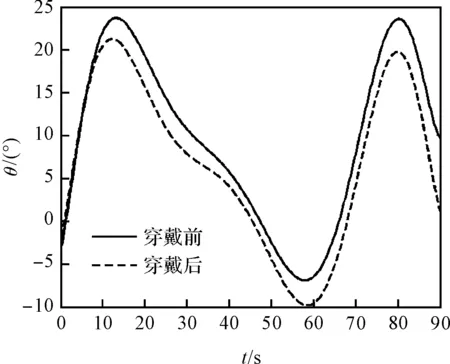
图4 髋关节屈曲/伸展前后对比图
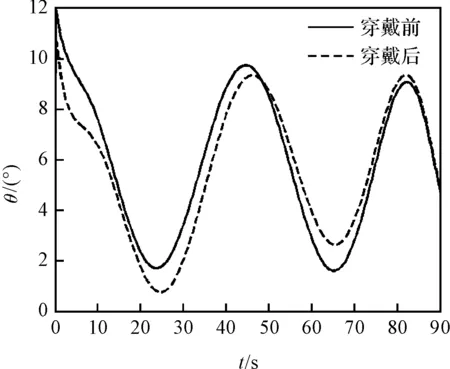
图5 髋关节旋内/旋外前后对比图
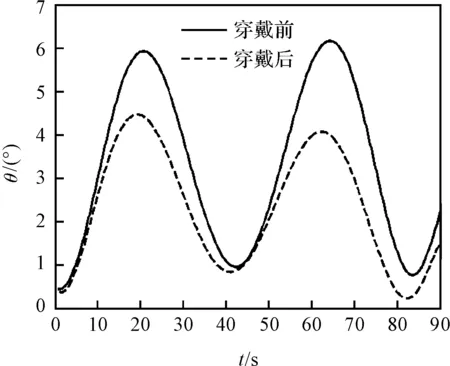
图6 髋关节外展/内收前后对比图
以上曲线是利用Matlab进行拟合后所得。从中可以看出:采用弹性体设计的外骨骼髋关节,在穿戴前后的变化趋势相同,且曲线频率相近,髋关节屈曲/伸展方向运动最大角度差为4.89°,外展/内收方向运动最大角度差为1.58°,外旋/内旋向运动最大角度差为1.06°,关节运动角度相差较小,且在实际穿戴行走时,对人体的干扰较小。所以,采用弹性元件设计的外骨骼髋关节能够实现与人体较好的耦合,对人体正常行走姿态的影响较小。
4 结束语
本研究设计了一种基于弹性体的外骨骼机器髋关节,该髋关节设计有3个自由度,分别对应生物学上人体下肢大腿的屈/伸、内收/外展、内旋/外旋运动。通过理论分析,得出该弹性体的尺寸关系,并通过Simulation仿真分析,完成弹性体与整体机械结构的设计与加工。
本文通过利用MPU6050多轴加速度传感器,采集人体在穿戴外骨骼前后的行走姿态,进行了人体穿戴前后的对比实验。结果表明:该设计在人体行走过程中的最大角度差为4.89°,且行走步频相近,跟随性好,该外骨骼髋关节的设计是可行的。
