无人机航摄系统在海洋领域的技术应用
2018-08-01王雪宝
□ 王雪宝 陈 冲
(浙江省海洋技术与信息中心,浙江 杭州 310012)
0.引言
近年来,随着飞行器制造和电子技术的进度以及精密定位、通讯、数据处理等关键技术的成熟,利用无人机系统以高分辨率机载传感器、快速的数据处理系统为技术支撑,无人机遥感技术在我国海洋领域得到了广泛应用,但高分辨率无人机遥感影像在海洋资源调查、海洋灾害、海洋环境以及海洋执法等领域的应用还是比较少的。
本项目利用无人机系统以技术创新带动海洋执法、海洋环境监测、海洋资源、灾害应急等管理水平的提升,对航空影像数据获取与数据处理能力进一步加强,提升海洋综合管控能力,为浙江省海洋综合管理、浙江渔场振兴修复、“一打三整治”工作拓展提供了强有力的技术保障手段。本文的无人机系统通过其作业时效性、成果可靠性及海洋测绘质量的整体优越性及低成本已超越了常规海洋测绘范畴,本项目成果的有效利用解决了现实难题,实现了多方共赢,为进一步加强海洋综合管理,整合海洋资源提供了技术基础。
1.无人机航摄系统结构
该系统由无人机飞行平台、遥感传感器系统、飞行控制系统、通信系统、GPS实时动态差分定位系统、地面控制站系统、数据处理系统组成。
1.1 无人机飞行平台
该飞行平台为滑跑起降油动固定翼无人机(如图1所示),机长2.2m,翼展3.4m,全高为0.7m,空机重量18kg,最大起飞重量 35kg,最大载荷重量10kg,燃料类型97号汽油,最大续航时间8h,最大飞行高度5000m,抗风能力6级(非持续侧风),巡航速度100km/h。具体作业能力(如表1所示)。
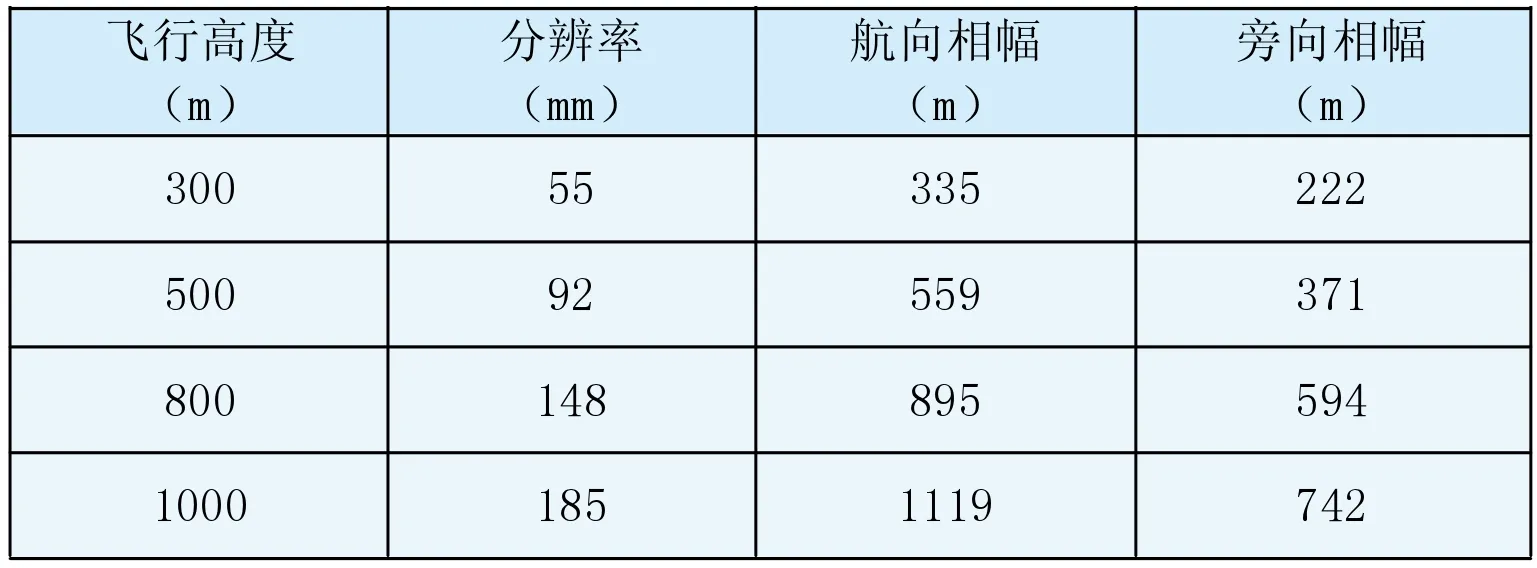
表1 无人机系统航测作业能力

图1 无人机平台
1.2 遥感传感器
传感器为尼康D810相机,传感器类型CMOS,有效像素 3635万,像元尺寸4.9μm,最高分辨率7360×4912,镜头光圈F2.0~F22,焦距范围35mm,镜头长度43.5mm。该机身重量约810g,镜头重量205g,内存卡32GB,快门速度30-1/8000s。
1.3 GPS实时动态差分系统
该系统采用GPS实时差分技术,即无人机设备上加载GPS接收机,在地面已知点上架设GPS基准站,通过接收卫星信号,确定无人机的空间位置。该系统由GPS接收机、地面GPS基准站、地面基站GPS数据发射器、GPS数据差分处理器组成。执行自主飞行作业时,必须是GPS实时差分模式。
1.4 地面站系统
地面站控制是无人飞行器的飞行监控和控制平台,主要由电源、计算机、通信设备、图像采集和处理设备组成。地面站主要功能为:向飞行器发送各种飞行指令,监控并显示飞行器状态和各个传感器,在地图上跟踪飞行器航线,进行航线规划,配置飞控的各种参数,控制任务载荷等。
2.飞行作业与数据处理
2.1 作业区域概况
本次作业区域为温州市苍南县大渔湾(如图2所示),作为温州最大的海湾之一,这里浅海滩涂资源丰富,拥有鱼类、甲壳类等近百种底栖生物,有7万亩“海上耕田”。苍南县大渔湾口为该县主要紫菜养殖区域,距县城东南21.8km,东临大海,西靠鹤峰,最高峰约400m,海域面积约100km2。
近年来紫菜养殖效益可观,紫菜养殖面积高达5万亩,海湾内养殖面积已经饱和,随着新养殖户的增加,抢“地盘”现象日益凸显,镇与镇、村与村、户与户之间的边界纠纷时常发生。为破解养殖用海乱象,创新实施大渔湾养殖用海二级承包工作,开展利用无人机航测的技术确定户与户、村与村、镇与镇之间的养殖区域的经纬度界线,避免因养殖区域交叉而导致纠纷。

图2 作业范围图
2.2 作业技术流程
2.2.1 航摄情况
本次作业时间为2016年11月11日,晴,无雾霾,微风,气温 21℃~10℃,上午 10:00 开始准备,起飞地点为新修的水泥公路上,宽约8m,离作业区域中心位置约12km,10:30开始航摄,航摄完成历时5h,共计两架次,航摄面积95km2,设计南北航线为34条,航线总长度为355km;共拍摄像片2907张,有效像片2875张;设计地面分辨率为10cm,航高为550m,航向重叠度为85%,旁向重叠度为65%;相机类型为尼康D810,单像片大小为5500像素×4500像素,相机焦距35mm。
2.2.2 航线设计及单像片成果展示
第一架次航线设计图(如图3所示)
精确航线设计:设置坐标范围、传感器参数、重叠度、地面分辨率、摄影比例尺,进行航线编辑,设计飞行方向、补飞措施,统计输出导航文件。

图3 航线设计图
单像片成果展示(如图4所示)

图4 单像片成果展示
2.2.3 工艺流程(如图5所示)
2.3 数据处理
2.3.1 空中三角测量
本项目采用航空影像数据处理软件Pix 4DMapper进行空三加密。在Pix 4DMapper上直接导入数码相机参数和控制点成果,通过自动匹配相关影像产生自动匹配点,对海面点位不足区域,以养殖围杆为基准进行人工加点。本项目忽略高程注记。在像片上量测外业控制点后,通过光束法平差后,输出加密成果。
2.3.2 数字正射影像图(DOM)生产
使用Pix 4DMapper完成DOM的数据采集拼接,并由PhotoShop来完成DOM后期调色处理。数字正射影像(DOM)的地面分辨率为0.1m,成图范围为内图廓线外扩10个像素并且无影像区域自然留白。
2.3.3 DEM获取

图5 DOM工艺流程
将空三成果数据导入Pix 4DMapper生成DEM。像对定向,在全数字摄影测量立体采编系统的测区管理模块下,将影像数据、加密成果导入该系统内,由系统自动完成像对定向。单片纠正,利用全数字摄影测量立体采编系统测区管理的正射影像制作功能,以像片为单位,按照每个像对的范围,以像主点为中心,片片纠正,生成单片正射影像。
2.3.4 正射影像镶嵌、重采样与图幅裁切
对图幅范围内需要镶嵌的所有单片正射影像,利用软件对其进行匀光、拼接、图幅裁切和正射影像输出,生成影像文件*.tif和影像定位信息文件*.tfw。拼接好的正射影像重采样,采样后地面分辨率为0.1m,图幅裁切按照内图廓线范围外扩10像素裁切。
2.3.5 正射影像修饰
本着自然美观的原则,应对影像进行适当调整,使影像清晰,色彩柔和,反差适中,幅与幅之间无明显色差。最后,进行DOM检查输出成果。
2.3.6 外业检核点测量
利用浙江省级CORS系统的网络RTK技术,在GPS信号正常,固定解状态下采集数据。对每个检核点采集两次,测量结果平面位置较差小于5cm的取其均值作为最终测量成果。平面检核点点位选取比较明显且以判断的地方,如房屋角、堤坝角等(如图6所示)。因本项目仅需要平面位置信息,故高程信息并未作为本次的信息采集内容。
检核点测量情况。
2.3.7 精度统计


图6 现场检核图
依据实地GPS RTK实测检核点坐标与在ArcCIS下读取的同名像点坐标的较差,按公式(1)进行计算统计。
本项目无人机航摄要求影像分辨率优于10cm,平面位置测量精度优于1m。经无人机专业软件自动测试完毕后,本项目成果影像分辨率为8.57cm,满足设计要求;由于区域位置情况特殊,平面检核点选择比较困难,最终外业测量平面检核点32个。DOM精度统计情况(如表2所示)。
3.结束语
3.1 温州市苍南县大渔湾紫菜养殖区调查首次采用无人机航摄作业,获取高清晰无人机影像,无人机航摄高度550m,分辨率8.57cm,平面位置精度0.63m,完全能满足紫菜养殖区范围内各行政村的养殖区域界线调查的需要。该无人机作业方式打破了常规海洋测绘、调查的作业模式,极大地提高了工作效率,节约了大量成本,只需要相关责任单位及人员在影像图面标出养殖界线界址点即可,为调查生成DLG图提供了便利。由于本项目实施在沿海区域,相关检核点主要选择在岸线的陆地上,海域中尚无选择检核点。
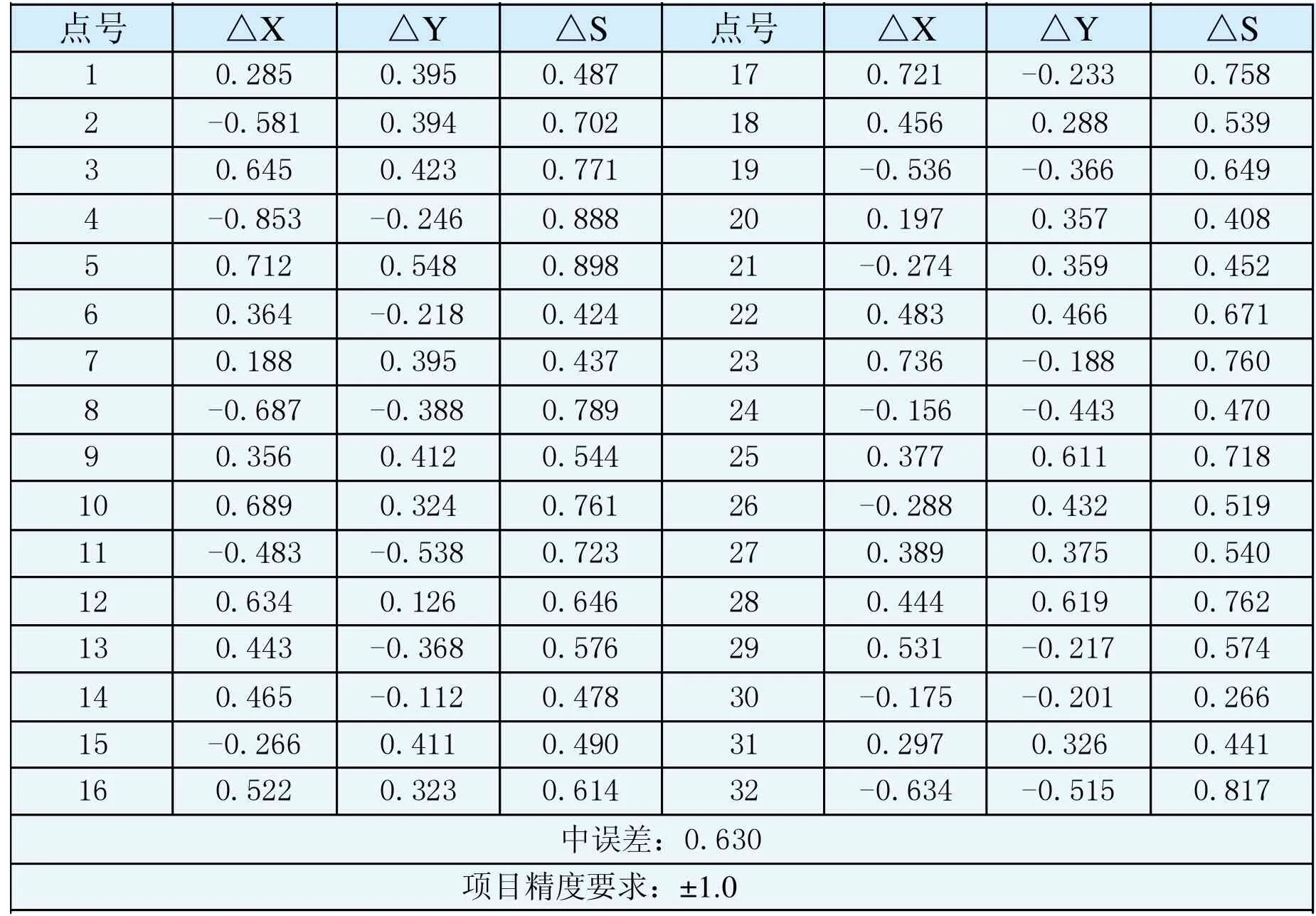
表2 DOM精度检查统计
3.2 本次无人机航摄系统作业取得了初步成果,是一次新技术的尝试。科技是第一生产力,以技术创新带动海洋执法、海洋环境监测、海洋资源、灾害应急等管理水平的提升,形成海域遥感监测数据采集能力,是海洋管理发展的方向。相信无人机航摄系统在海洋领域将会得到很好地利用,并会有广阔的应用前景。
3.3 本次海上无人机作业的顺利实施,快速、有效地获取了基础海域数据,为苍南县养殖用海二级承包改革提供强力数据支撑,对强化国有海域有偿使用、完善大渔湾养殖海域管制长效机制、促进海域生态保护等具有积极意义,化解了社会矛盾、打破发展瓶颈,解放和发展生产力,增进了人民福祉,并为浙江省探索一条养殖用海改革提供了基础的技术保障。
