基于机载激光雷达数据中电力线提取方法研究
2018-08-01郑长春梁艳玲
□ 郑长春 梁艳玲
(1.山西亚太数字遥感新技术有限公司,山西 太原 030006;2.山西众智检测科技有限公司,山西 太原 030032)
0.引言
随着国民经济的高速发展,对高电压、大功率、长距离输电需求的提高,线路走廊穿越的地理环境越来越复杂,对其运行维护日趋困难。传统的直升机巡线大多搭载红外线摄像仪、数码摄像机、照相机等设备,在飞行的同时,对途经线路进行观察、获取线路走廊可见光和红外影像,但这些技术的空间定位精度均不高,很难精确判断线路走廊地物到线路的距离。而机载激光雷达测量技术可以很好地解决空间定位和测量精度等问题。它可直接采集线路走廊高分辨率的航空数码影像和高精度高密度三维激光点云数据,进而快速地获得高精度三维线路走廊的地形、地貌、地物和线路设施的空间信息。
目前激光雷达在电力线提取方面的应用正处于初始阶段,国内在此方面研究甚少,且提取的过程大都利用Hough变换提取电力线,即将三维点云转化到二维空间后,在进行Hough变换,此类方法损失了点云的高程信息,对于平面位置相同的多层电力线点云,不能快速实现单条电力线分类。此外,利用Hough变换检测电力线,计算过程复杂,不利于大数据的应用。Liang Jing等人直接根据同一根电力线上激光脚点紧密相连的特性,利用点云聚类的思想,并结合KD树组织数据结构进行最近邻搜索,实现了电力线的快速自动提取。但该算法需要满足聚类阈值K需小于两根电力线的最小距离,当点云间距大于两根电力线的最小距离,K值无法满足聚类需要,降低了聚类的完整性。
本文重点分析了超高压输电线路走廊的基本特征,简化电力线提取流程,提出一种从机载激光雷达点云中快速提取电力线点云的方法,并运用不同层电力线的高程差异实现电力线的分股,并通过试验验证了该方法的可靠性和有效性。
1.电力线提取方法
电力线的快速高效提取,首先充分掌握原始激光雷达点云数据中电力线路设施的特征,即杆塔和输电线路的基本特征;在此基础上需要找有效的方法,使用这些特征,将这些设施从激光雷达点云中分隔提取。
1.1 电力线路的基本特征
与一般输电线路走廊不同,超高压输电线路相对于地面点的高差很大。其中,杆塔相对于地面点的最大高差达55m,远远超过附近植被点,且沿垂直方向杆塔具有较好的连续性(如图1(a)所示);导、地线悬挂于两座杆塔之间,沿竖直方向按照高低分列式排布,导线弧垂最低点与地面之间保持较大的高程差(如图1(b)所示)。

图1 (a)杆塔剖面图
1.2 提取流程
本研究将电力线提取分为电力线点云数据粗分类、精分类和电力线点云分股三个过程,具体流程(如图2所示)。
1.3 激光点云粗分类
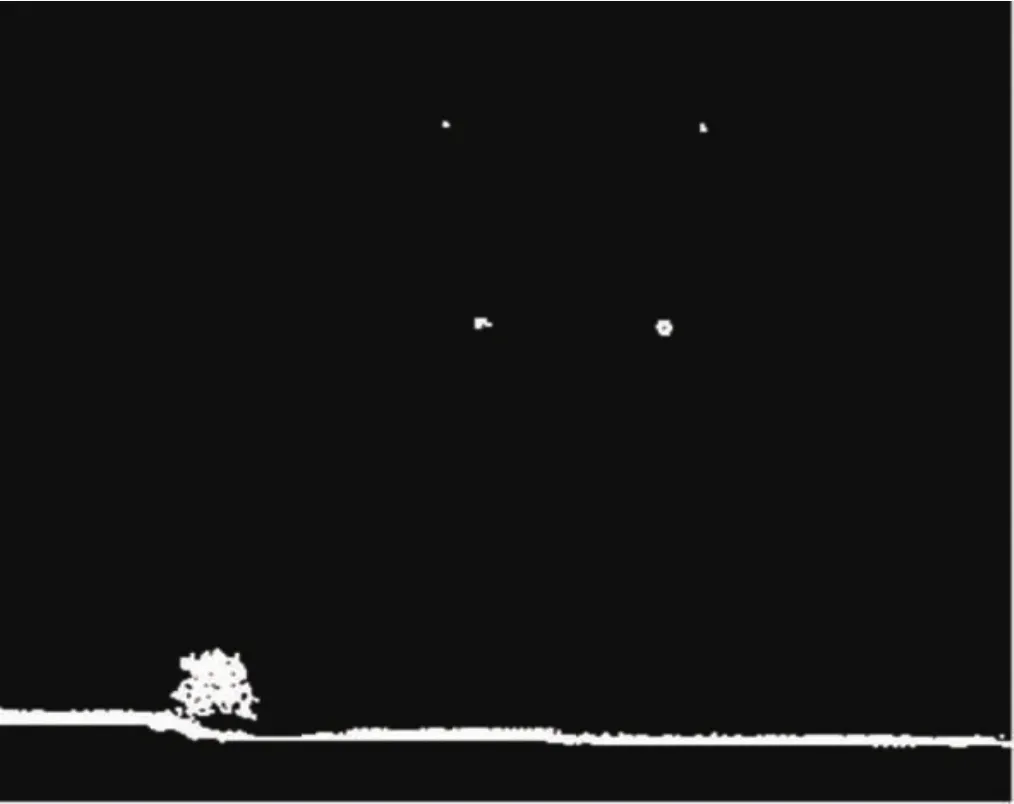
图1 (b)导线纵向剖面图
在狭长的电力线走廊区域内,激光点云主要分为地面点、植被点、建筑物点、电塔点和电力线点。本文首先采用滤波的方法滤除地面点,保留非地面点云数据。根据滤波后获取的非地面点云的空间几何特性,电力线点不同于植被点和杆塔点,在局部范围内,电力线点云的高程值与非电力线点云高程呈现分布不连续。因此,首先以地面点建立基准高程面,通过设置合理的高程阈值,即可快速剔除大部分非电力线点云。
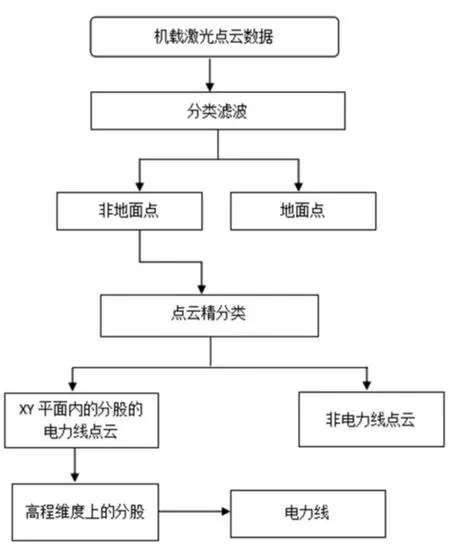
图2 机载激光点云数据快速提取电力线流程
1.4 激光点云精分类
经过粗分类后的电力线点云基本剔除了植被点,但还包括杆塔点和部分散乱的噪声点。由于电力线点云在XY投影的平面内具有线状特征,因此本文运用随机抽样一致算法(RANSAC)进行进一步的精细分类。该算法是从一组包含离群的被观测数据中估算出数学模型,对于含错50%离群数据的样本集,能够有效获得参数数学模型,具有较强的鲁棒性,方法如下:
(1)将粗分类得到的电力线点云投影到XY平面,得到二维平面点集A。
(2)设置迭代变量K=0,迭代变量阈值K0=1;在 A中随机选择两个点(A0,A1),并构造一条直线L。
(3)遍历A中的每个点Ai(Ai二维平面点集中任意点),计算Ai到直线L的垂距d;确定一个垂距阈值d0,其大小取决于每股电力线的直径大小;如果d<d0,则判定该点为直线L上的点,反之弃之。
(4)统计直线L上点的个数n,并与阈值n0比较(n0为估计的每段电力线大致的点云数目,视点云密度而定)。如果n>n0,更新迭代变量阈值(如公式(1)所示),并递增迭代变量 k;否则,无需更新,只递增迭代变量k。

式中:p代表所有直线上的点全为电力线点云的概率,由于电力线点云在粗分类点集中占有很大的比例,因此可设置为一个较大的值;r为n与点集A的点云数量的比值。
(5)迭代步骤(2)-(4),直至 k<k0,或者 k0小于最大迭代次数kmax。
(6)迭代完成后,统计L上点的个数N,并与阈值n0比较。由于电力线走廊宽度较窄,因此交跨的电力线点云数量较少,可通过设置此变量达到剔除交跨电力线的目的;如果N≥n0,则判定直线L上的所有点为电力线点。以粗分类结果中的非电力线点为原始数据,重复步骤(1)-(6)直至N<n0;或者重复的次数达到一个次数限制的阀值K,其大小可根据电力线的股数以及电力线转折的次数来确定。
RANSAC算法虽然能够剔除大部分电塔点云,但不能剔除电塔上绝缘子的点云,由于与电力线在同一垂直面上,也被投影到A~[m,n]平面。可用高程统计分析的方法剔除这部分点云。图3为RANSAC算法处理后的数据,比较1号和2号方框的点云,在一定的高程范围内1号点高程呈现连续性分布,基于这一特性来剔除绝缘子点云。
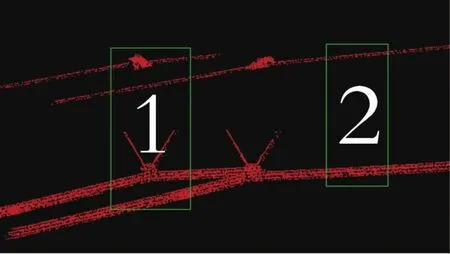
图3 RANSAC算法处理后的点云
1.5 电力线分股
通过精分类处理激光点云后,一方面电力线激光点云与地面、电塔等背景激光点云数据分离,独立成为一类地物;另一方面将电力线在XY平面上分成了多段直线。由于高压输电线路往往包含多层电力线数据,同一垂直面上的电力线投影到XY平面上会表现为同一条电力线,因此还需要对电力线进行分股,方法如下:
(1)针对每段电力线L,利用RANSAC算法得到该段电力线的走势,将L上的点投影到L与Z轴构成的平面上。图4为同一垂直面上1号电力线和2号电力线投影后的意图。
(2)对投影后的电力线进行分段。如果直接对整段电力线进行高程比较,受电力线走廊地形或电力线弧垂的影响,可能会导致错分,因此对电力线点云进行分段,取小范围内的电力线点云进行高程比较。
(3)取每段电力线中高程值最小的点,其该值记为Z0,将该段电力线中每个点的高程值与Z0作差,得到高差h。
(4)设定一个高差阀值h0其大小根据电力线的弧垂情况确定;如果h<h0,则可以看作是同一根电力线上的点。
(5)对于未确定属于哪根电力线的点,重复步骤(3)和步骤(4),直到所有的点都归属某一电力线为止。
(6)如果直接分析整段电力线,高差阀值最小应设定为h1,才能找到2号电力线上的所有点,但由于1号电力线a段的高程值较小,使得1号线的a段被错分为2号线;如果取b段进行分析,设定h2为高差阀值,则能很好地区分2号电力线。
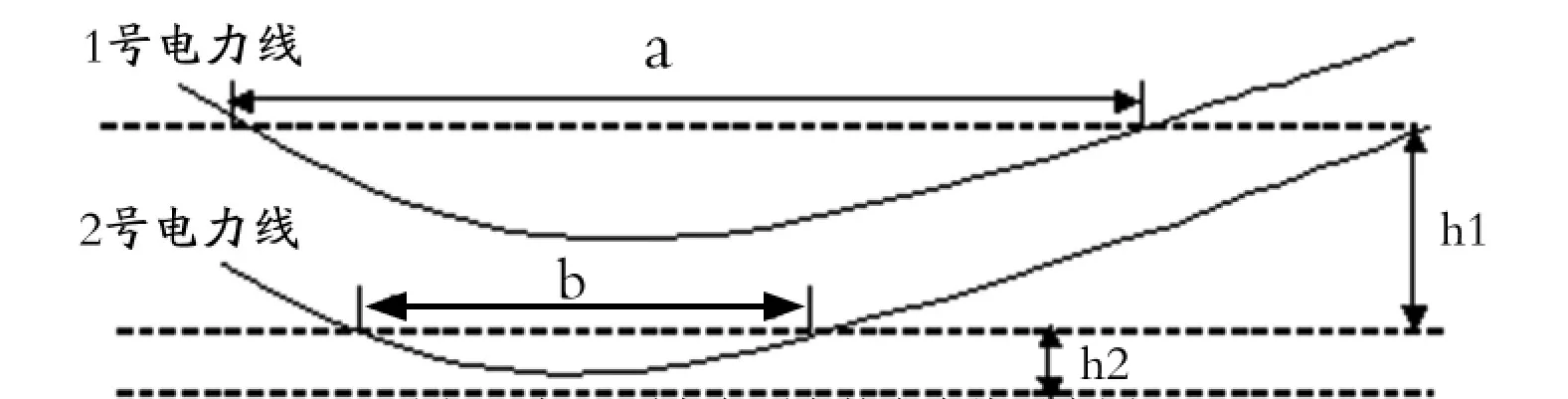
图4 投影到走向面内的电力线示意图
(7)电力线点云分析比较完成后,根据点云数据地理空间位置和属性信息自动连接成完整分股电力线。
2.实验与结果分析
本文以Microsoft Visual Studio 2010为研发平台,集成使用Open CV图像处理库,实现机载激光点云数据的电力线提取。采用电网公司±800kV的输电线路机载激光雷达数据进行试验验证。该线路长度为17.4km,包含37个电塔,4根电力线,总点数19397万个点,平均点密度为每平方米54个点。经量测,电力线高差间距为20m,水平间距为22m,电力线距地表高差最小为25m,每股电力线直径约为1.2m,绝缘子直径约为2.8m。线路上的地形起伏较大,最大坡度约47°,地表覆盖主要包含建筑、树木、河流、公路、电塔、电力线、交跨线等。针对以上特点,首先利用滤波算法,分出地面点云与非地面点云,然后以地面点建立基准高程面,通过高程阈值进行粗分类试验,整体效果(如图5(a)所示),可以看出,除了电力线点云外,还包含部分杆塔点云和少量的噪声点。利用RANSAC算法,选用参数分别为:d0=1,n0=150,p=0.99,Kmax=60,K=10,实验效果(如图5(b)所示),其中电塔点云和噪声点已被剔除,但是仍然包含了一些绝缘子点云。选用最小分析单元,即绝缘子直径2.8m、高差20m为高程统计阈值,实验效果(如图 5(c)所示),此时绝缘子点云已经被剔除。最后进行电力线分股,即选用5m长度范围内的点云为最小的分析单元,判断是否属于同一根电力线的高程差标准为1m,分股效果(如图 5(d)所示)。

图5 (a)粗分类结果
图5 (b)精分类结果

图5 (c)剔除绝缘子后局部放大效果
图5 (d)分股后电力线效果
上述实验的粗分类过程耗时21.4S,精分类以及电力线分股过程耗时45.8S,总耗时67.2S。统计该方法提取的每根电力线点云数,并与人工结合Terrasolid软件提取电力线点云结果进行对比(如表1所示)。由于受电塔结构与点云密度等因素的影响,除了遗漏部分电力线点云,提取结果中还包含少量非电力线点。

表1 电力线提取结果分析
3.结束语
本研究在充分分析高压线路走廊结构特征的基础上,采用滤波分类和随机抽样一致性相结合的方法,有效地从机载激光雷达数据中提取电力线,并通过实际工程数据验证了该方法的可靠性和稳健性,为输电线路巡检提供可靠的数据处理方案。但该方法不足之处有两个方面,一是涉及的参数多且设置繁琐,一些参数的大小严格依赖于点云数据密度。二是剔除绝缘子时,把整个绝缘子垂直范围内的点云全部剔除,包括与绝缘子相连的电力线点也被剔除。如何建立参数与点云密度关系,自动获取相应参数及如何更好的区分绝缘子点与电力线点有待于深入探讨问题。
