室内可见光通信盲均衡技术研究
2018-08-01奚海强
王 辉,奚海强
南京工业大学 计算机科学与技术学院,南京 211816
1 引言
白色发光二极管(Light Emitting Diode,LED)目前广泛应用于室内照明当中,因此基于白光LED的可见光通信(Visible Light Communication,VLC)技术可以以低廉的价格在实现室内照明的同时,进行室内通信,该技术适用于各种接入场景,无电磁干扰,绿色环保,保密性能好且不占用当前日益紧张的频谱资源。在室内VLC系统中,由于同一信号经过不同路径达到接收端,由于多径效应会导致码间串扰(Intern Symbol Interference,ISI)。为了有效地解决ISI导致的误码率上升,提高可见光通信系统的传输特性,可以在系统的接收端使用均衡器对信道的传输特性进行补偿,从而提升通信系统的可靠性[1-5]。
目前,针对可见光通信系统的均衡算法多是基于训练序列的,如最小均方算法(Least Mean Square,LMS)算法[6],这样一来训练序列占用了信道的带宽。由于目前VLC系统中最广泛使用的荧光粉LED的调制带宽只有几兆,因此基于训练序列的均衡算法在实现均衡时要牺牲一部分信道带宽。不同于传统的自适应均衡技术,盲均衡技术可以通过接收序列本身的先验信息,自适应地调节均衡器的权系数,使均衡后的输出序列逼近系统的发送序列,是一种不需要训练序列的均衡技术,因此,盲均衡技术更适合室内可见光通信系统。在现有的盲均衡算法中,恒模(Covariance Matrix Adaptation,CMA)算法是使用最为广泛的一种,本文采用一种改进的CMA算法对室内可见光通信系统信道进行补偿,解决系统的码间串扰问题,从而提升系统性能。
2 室内VLC系统信道分析
2.1 信道建模
图1为VLC系统的基带传输模型,其中系统的脉冲响应h(t)反映出了通信系统的信道特性[3]。
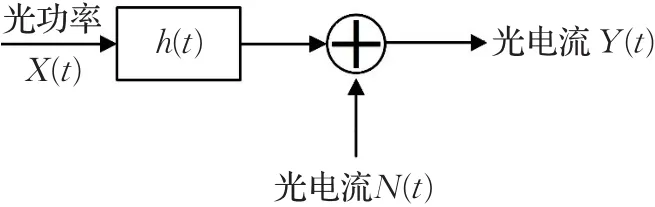
图1 VLC系统基带传输模型
在室内可见光通信系统中,白光LED在作为光源的同时也是光信号的发射端。图1中X(t)表示LED发出的经过强度调制(Intensity Modulation,IM)的光信号。系统的接收端使用直接探测(Direct Detection,DD)的光电二极管PD来接收传输的光电信号,接收端的光电流信号Y(t)可表示为[7]:

其中N(t)是与信号独立的加性高斯白噪声,在实际的室内VLC系统中,系统的噪声源非常复杂,除去系统器件的热噪声,还有接收端PD因自身暗电流产生的电噪声以及周围环境产生的背景光噪声等。文献[8]认为,当背景光照具有较高强度时,其产生的冲激噪声可以建模为与信号相互独立的高斯白噪声;当背景光照比较弱时,则主要的噪声源为PD的暗电流产生的电噪声,此噪声仍然是与信号相互独立的高斯白噪声。因此,本文将室内VLC系统中的噪声源统一由加性高斯白噪声表示,从而可以降低系统的复杂性。
2.2 信道冲激响应
参考Barry和Carruthers[9-11]等人对室内VLC系统冲激响应提出算法,本文提出一种改进的算法来计算室内VLC系统的信道冲激响应。
2.2.1 光源和接收器的模型
室内VLC系统中,发射端光源LED一般通过辐射强度模式函数R(ϕ,θ),单位方向向量nS以及位置向量rS和功率PS四个参数来描述。其中,R(ϕ,θ)函数被定义为与单位方向向量nS夹角(ϕ,θ)处单位立体角内LED光源所发出的能量。当系统采用的LED光源满足理想的朗伯辐射模型时,光源的辐射强度可近似的表示为:

式中n代表朗伯辐射序数,朗伯辐射序数表达式为:

表明了其与光源半功率强度角的关系。光源S由一个三元组决定:
接收端接收器的描述方法与发射端的描述方法相似,类似的,接收器R可以由一个四元组来表示:

其中,rR为接收单元位置向量,nR为单位方向向量,AR为面积,FOV为视场角。
2.2.2 反射面模型
假设室内VLC系统中所有的反射面(包括地面、墙面和顶面)都是理想的朗伯漫反射模型,可见光在反射面上的辐射模式与光的入射角的关系不纳入本文的考虑范围。分析发生在面积为dA、反射率ρ的微反射面上所发生的反射,将发生的反射近似为光源和接收器两个部分进行建模分析:首先,将该微反射面近似为一个面积为dA接收器,计算反射面所接收到的光功率dP;其次,将这个微反射面近似为一个功率为P=ρdP和n=1的理想朗伯光源,计算其功率[12]。
2.2.3 冲激响应算法
在一个确定的室内VLC系统中,系统中的光源S和接收器R就是固定不变的,冲激响应表示如下:

式(4)中,h(k)(t)表示第k次反射的响应。
先对系统第零次反射的响应h(0)(t)进行分析计算,h(0)(t)表示可见光由发射端LED,在没有经过反射光功率的传递系数直接传到接收端,也就是从发射端直射到接收端的响应。

其中,dΩ为微反射面对于光源的立体角,且有:

R是光源和接收器的距离,且有:

θ是接收器的入射角,且有

ϕ表示光源LED所发出的白光照射到接收器上时,照射的光线与光源轴之间的夹角,且有:

矩形函数的定义为:

通过迭代可以得到光信号在信道中经过第k次反射的冲激响应,计算公式如式(11)所示:

式(11)表示对光源S面上所有的微反射面积分,其中,r表示光源S面上微反射面的位置向量,n表示r位置处微反射面的单位法向向量,ρr表示r位置处微反射面的反射率,且有
已有大量研究结果表明,随着反射次数k的增加,信号达到接收端时的强度也随之衰弱,对应的冲激响应占系统整体的冲激响应的比例明显降低[13]。为了简化系统模型的复杂度,信号经过反射达到接收端的次数本文只考虑一次,多次反射的情况忽略不计。因此,本文的冲激响应近似如式(12)所示:

3 CMA算法及改进
3.1 CMA算法
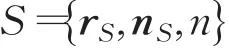
现有的常用的盲均衡算法中,恒模(Covariance Matrix Adaptation,CMA)算法由于其易于实现且鲁棒性优异,是目前使用最为广泛、研究最多的盲均衡算法。在VLC系统中,相比其他的自适应均衡算法,CMA算法最大优点是无需使用训练序列,而是依据某种准则来产生与希望恢复的输入信号相似的滤波结果,不必占用系统带宽。其结构如图2所示。
图2 CMA算法的结构
CMA算法的输出可以表示为:

它的代价函数为:

R2是一个常数,且有:

根据最速梯度下降法有:

其中μ表示步长。
CMA算法权系数的迭代公式可以由式(16)推出:

由式(17)可以看出,CMA算法的迭代过程与训练序列无关,所以发射端不需要发送训练序列。
传统的CMA算法,步长因子通常采用固定值。如果选用较大的步长μ,系统的收敛速度加快,跟踪时变信道的能力提高,但是系统的稳定性会随之削弱,稳态误差偏大,系统的ISI现象严重且系统的BER也随之增大。如果选用的步长μ偏小,系统的稳态误差减小,ISI现象减弱,均衡效果良好,但是算法跟踪信道时变的能力减弱,算法收敛速度会有所减慢,这导致了系统的稳态误差和收敛速度之间存在矛盾,这一问题严重制约了CMA算法的性能。同时,在室内VLC系统中,传统的CMA算法存在着收敛速度过慢的问题,为了针对上述问题,本文提出了一种改进的CMA算法。
3.2 改进的CMA算法
针对2.1节中提出的传统CMA算法的性能问题,本节提出一种的改进的算法。算法改进的主要思想是在算法收敛的初期采用大步长因子,提高算法的收敛速度和对时变信道的跟踪能力;当算法接近收敛后,改为采用小步长因子,用来获得较小的稳态剩余误差。
将变步长的思想引入算法改进中,提出一种改进的变步长CMA算法,步长的变化由一个函数来表示[14],本节采用的函数为 Sigmoid函数,步长表达式如式(18):

其中

e(n)表示为均衡器输入与输出之间的差值。
最终可得到式(20):

其中,a是一个常数,用来控制步长变化的快慢,通过改变参数a的取值,可以获得变化快慢不同的步长曲线;β用来控制步长μ(n)的取值范围。矩形窗的长度L的大小影响着MSE的变化范围。由式(18)、(20)可以看出,MSE的取值是对剩余误差函数e(n)取平方,再通过移动长度为L的矩形窗,最后取均值得到。通过矩形窗取得MSE,可以防止通信信道被系统突发的信号干扰时,由于剩余误差e(n)突然变大,而导致MSE突变。可以有效地削弱突发强干扰信号对系统信道所带来的影响,避免误调导致的性能受损。
在改进的算法中,由于要满足0≤1-exp[-αMSE]≤1,所以β的取值需要在一定的范围之内:0≤μ(n)≤β,即步长因子的变化范围在[0,β]内。为了保证算法的收敛,步长因子必须要满足其中,R表示为均衡器输入信号的自相关矩阵形式,tr(R)表示矩阵R的迹。
由上述的理论推导可以看出,在算法收敛初期|(e(n))|较大,随着算法的收敛 |( e(n))|也逐渐减小。当算法达到稳态时,|( e (n))|最小。因为步长因子μ(n)和剩余误差函数 | (e(n))|的单调性相同,且变化规律相同,从而可以实现对步长因子μ(n)的自适应控制。经过多次仿真结果分析,本文参数选取β=0.01,α=1,L=100。
4 仿真结果与分析
对室内VLC系统进行建模分析,采用一个目前流行的房间模型,5 m×5 m×3 m的一个房间模型。LED光源发射机固定在天花板上,为了满足房间光照度的需求,本文采用4个LED阵列,每个LED阵列中LED的个数为60×60个,相邻LED间距为2 cm。4个发射机LED阵列中心在空间中的位置分别为(1,1,3)、(1,4,3)、(4,1,3)、(4,4,3)。接收端PD阵列位于85 cm高的通信平面上,在空间中具体坐标为(0.4,2.0,0.85)。本文的仿真环境参考文献[15],具体的仿真参数如表1所示。
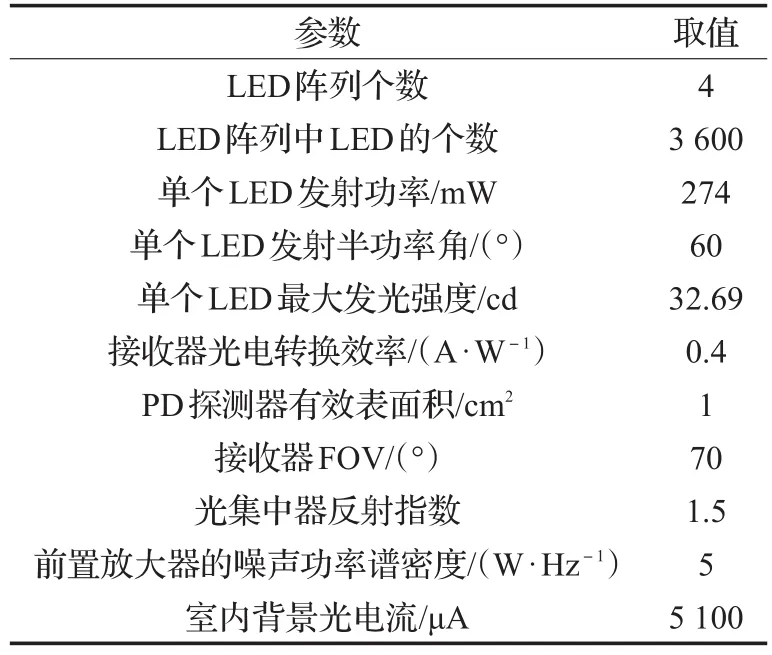
表1 室内VLC系统仿真参数
文献[16]提出了一种基于自适应变步长的盲均衡算法,采用自适应权重法,利用步长因子取代非线性的动态惯性权重系数。步长因子表达式如式(21)所示:

其中,μmax、μmin、generationmax、gavg分别表示最大步长、最小步长、最大迭代次数、平均迭代次数。gi表示第i次的迭代次数,步长因子μ随着迭代次数gi而自适应的改变。
通过仿真对文献[16]提出的改进算法和本文提出的改进算法以及原盲均衡算法进行分析比较。
均方误差(MSE)和收敛速度是衡量均衡算法性能的两个重要参数,先通过这两个参数来进行仿真分析比较。对于传统的CMA算法,选取固定步长值为μ=0.000 2。仿真采用的数据传输速率为500 Mb/s,加入信噪比为25 dB的加性高斯白噪声。
图3所示为通过仿真得到的,改进前后的CMA算法的均方误差(MSE)与迭代次数的关系曲线,数据取1 000次仿真实验的平均值。图3中显示,传统的CMA算法需要迭代2 500次左右才开始收敛。而文献[16]所提出的自适应CMA算法在1 500次左右就开始收敛,且稳态误差要低于传统的CMA算法。本文所提出的改进CMA算法,收敛后的稳态误差与自适应CMA算法相当,但是收敛速度比略快于自适应CMA算法,在算法迭代1 000次时就已经基本收敛。因此,改进后的CMA算法在可靠性和效率上均有大幅提高。
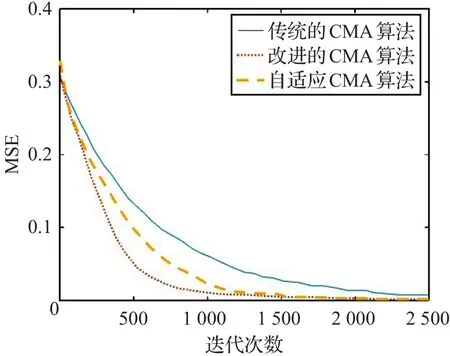
图3 MSE-迭代次数关系曲线
误码率(BER)是衡量一个通信系统性能优劣的重要参数,图4所示为仿真得到的为改进前后的CMA算法与文献[16]所提出改进算法的信噪比(SNR)与误码率(BER)的关系曲线。图4中显示,两种改进的算法相较于传统的CMA算法抗噪声性能都有较大的提升。信噪比为25 dB时,传统的CMA算法均衡后系统的误码率为10-3量级,而两种改进后的算法的误码率均达到10-4量级,对噪声的抑制能力明显好于传统的固定步长的CMA算法,尤其是本文提出的CMA算法,随着系统SNR的提高,BER下降速度大幅提升。系统的抗噪声、抗干扰性能明显优于另两种算法。
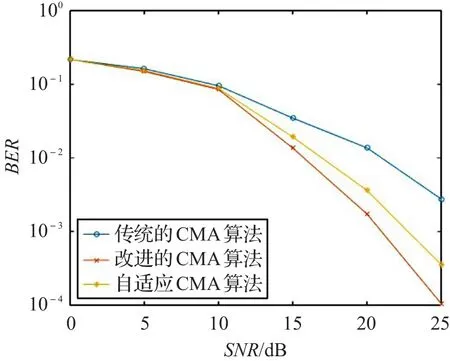
图4 误码率-信噪比关系曲线
为了验证采用盲均衡算法对室内VLC系统码间串扰问题的改善情况,引入均方根时延扩展(Root-Mean Square,RMS)概念,RMS表示信道冲激响应持续的时间,通常用来衡量信道中码间串扰问题的程度[17]。
均方根时延的表达式如式(22)所示:

其中,h(t)表示系统的冲激响应,τ0表示为:

均方根时延拓展τ越大,则说明信号达到接收端的时间延迟越久,意味着多径效应所带来的码间串扰问题越严重。图5所示为未采用均衡的室内VLC系统位于85 cm高的通信平面上的RMS仿真结果。

图5 未均衡的VLC系统均方根时延拓展
可以看出,未采用均衡时,室内均方根时延在0.6 ns到2.2 ns之间,RMS较大,码间串扰问题比较严重。在房间的4个角落RMS最大,且同一通信平面上的RMS分布不均匀。图6所示为采用了改进CMA算法的室内VLC系统的RMS进行仿真结果。
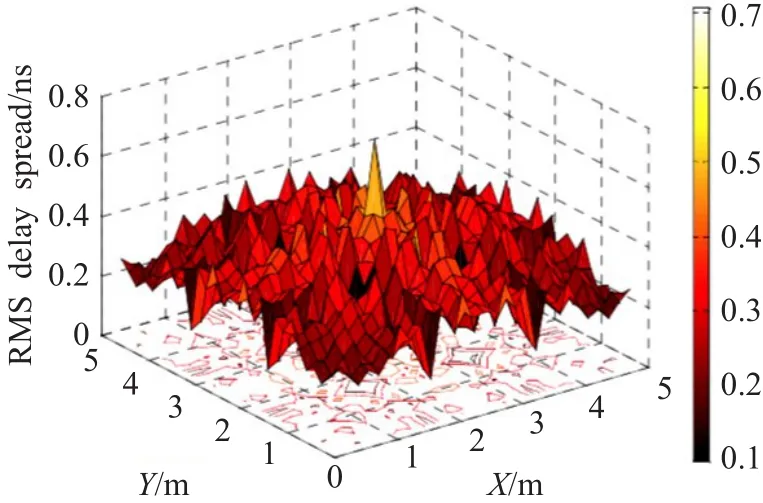
图6 均衡后的VLC系统均方根时延拓展
由图6可以看出,采用了改进的CMA算法对室内VLC系统进行均衡后,同一通信平面上的RMS降低至0.1 ns到0.7 ns之间,且分布均匀。因此可以得出,改进的CMA算法可以有效地降低室内VLC通信系统的均方根时延拓展,改善了室内VLC系统的码间串扰问题。
5 结论
首先对室内VLC系统进行了信道建模,通过改进的冲激响应算法分析计算了室内VLC信道的冲激响应。为了缓解由于VLC信道的多径效应导致的ISI问题,改善室内VLC系统的通信性能,论文提出了采用均衡器对室内VLC信道均衡。由于目前常用的均衡算法大多采用训练序列,在均衡的同时会牺牲系统的带宽,引入了不采用训练序列的 CMA盲均衡算法,针对传统CMA算法收敛速度慢且收敛速度和稳态误差存在矛盾的问题,提出了一种基于Sigmoid函数的改进的变步长盲均衡算法。由仿真结果显示,采用改进的CMA算法后,系统的BER有所降低,抗干扰能力有所提升。改进的CMA算法收敛速度更快,对系统的跟踪能力更强,系统稳态误差更小,室内VLC通信系统更加稳定可靠,码间串扰问题得到明显改善。