智能型抓臂式清污机在淮水北调工程中的应用
2018-08-01黄有琴
黄有琴
一、工程概述
安徽省淮水北调属全省“三横三纵”水资源配置体系的跨区域骨干调水工程,是支撑和保障皖北地区加快发展的重大基础设施,也是目前正在建设的国家南水北调东线配水工程和今后引江济淮的延伸工程,兼有工业供水、灌溉补水和减少地下水开采、生态保护等显著综合效益。近期水源为淮河干流及怀洪新河水系水量和南水北调东线工程分配的水量,具有相机调水特点,以置换和减轻现状工业及新增工业对地下水超采,遇部分干旱年份调水量不足时再临时启用当地中深层地下水应急补给,总体上起到兼顾经济社会发展和减少地下水开采之目的。远期可增加利用引江济淮工程水源,进一步扩大供水水量和提高供水保证率,最终实现中深层地下水全面禁采。
淮水北调工程新建固镇站、娄宋站、四铺站、侯王站共4级提水泵站,输水支线需新建贾窝站、岱山口站共2级提水泵站,其中北陀河、娄宋站、侯王站拦污闸拦污栅均采用智能抓臂式清污机进行栅前清污。
二、泵站清污机主要型式及特点
(1)抓斗式清污机:一般用在垂直或倾斜式拦污栅上,主要用来抓取拦污栅前大的硬性污物,对水草等较多的情况,清污效果不佳,效率不高。
(2)压耙式清污机:沿拦污栅面将污物压至机组进水口底部排砂口处,然后利用水流冲走,使用条件有限。
(3)铲耙式清污机:由机架、耙齿、扒齿、卸齿、上下滚轮等组成,适用于倾斜式拦污栅上,可清除栅前成团漂浮物或堆积的水草,设备结构比较复杂,体积较大,容易缠绕,维修频率较高。
(4)回转式清污机:由多分节活动短栅组成,活动短栅由链条、链轮带动回转,短栅底部带弯钩,将污物带到拦污栅顶部平台上,主要清除栅前小的漂浮物,设备结构比较复杂,不适合栅前大的、硬性污物清除,易卡阻,同时必须和拦污栅整体配套,附属污物运输结构设备,使用要求布置空间较大。
(5)网格式回转滤网清污机:适用于小型水、电站泵站,适合水草等污物比较少的环境。
三、智能抓臂式清污机
1.结构型式
抓臂式清污机主要包括四个部分:行走机构、抓臂抓斗、液压系统及电气控制系统。行走机构主要是满足设备运行范围及卸污,可增设集污小车,集污小车与行走机构连接,一起往复行走。行走机构单侧设有控制系统室,满足控制系统布置要求。抓臂由多节组成,相邻两节之间铰接相连,抓臂与转轴、抓臂与抓斗、每节抓臂之间设有液压油缸,每只液压油缸通过液压油管与液压泵站相连,液压泵站驱动液压油缸伸缩控制每两者之间的角度,带动抓斗沿控制系统设定的轨迹上升下降。液压泵站安装在行走机构上,通过液压油管驱动油缸抓斗上的液压油缸伸缩实现抓斗张开、闭合动作。泵站拦污栅智能抓臂式清污机布置示意图见图1。
2.设备特点
智能型抓臂式清污机清污时依靠抓臂强行下压抓取污物,有效提高清污效果和清污效率,特别是对于高强度集中拥堵在取排水口拦污栅前的上游污物,也能及时有效地清理干净。
清污机控制系统高度智能化,机械臂由三节支臂组成,支臂间由数字化伺服油缸驱动,控制系统驱动液压油缸协同工作,规划抓臂的运行轨迹。此产品独特的机械臂强力抓污设计,清污能力大幅度的提高,工作效率是三种传统机器的结合,提高3倍以上,同时降低整个工程的造价。(1)根据泵站土建布置及场地情况,轨道采用过山车轨道结构,由两根平行无缝钢管作为行走轨道,通过矩形钢管焊接成桁架结构,固定在拦污闸检修平台闸墩上。(2)移动车上设有4个车轮组,每组有上、下、外3个限位行走车轮,有效防止移动车侧翻。(3)清污机抓臂在移动车上设有回转盘机构,抓臂可180°及以上旋转,活动区域更大,操作更加灵活方便。(4)回转盘机构由回转支承和液压驱动装置构成,回转装置由液压马达驱动。(5)采用双曲型抓斗并配有切割刀片,较原先抓斗容积更大,宜切断水草,有效提高清污机的清污能力和效率。(6)抓臂液压系统采用伺服泵站+数字油缸,动作准确可靠,抓斗可严格按照PLC设定程序的轨迹运行,既能有效清理缠绕在栅条上的污物,同时不会破坏拦污栅。
3.设备运行及控制
抓臂式清污机在工作时,清污机随移动行走车沿行走轨道移动至第一个清污位置,自动控制系统会准确测量到这个位置,移动行走车停止运行后,抓臂旋转90°转向河道,抓臂带动抓斗沿控制系统设定的沿拦污栅前沿向下运行,运行到拦污栅底槛后,抓斗闭合,抓取污物,然后抓臂带动抓斗向上运行,当抓臂到达顶部后,抓臂反向旋转90°转回拦污闸,抓斗移动至集污小车上方,打开抓斗,把污物倾倒至集污小车卸污。然后移动行走车移至第二个抓污位置,循环进行清污工作,当所有抓污点都被处理过以后,移动行走车沿运行轨道返回并停靠在设定的停放位置并将集污小车内的污物卸除。
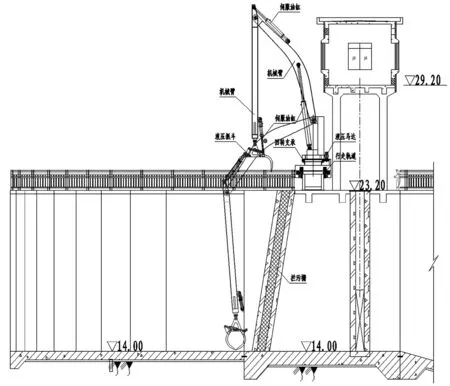
图1 智能抓臂式清污机布置示意图
控制系统设计先进可靠,设备配备多个力矩、位置及荷载限制器,在污物超载等意外情况下,系统自动报警停机,可经人工干预处理,确保清污机安全运行。清污机设计有全自动和手动遥控两种控制运行方式,采用两种方式控制,抓斗工作时下行轨迹均按规划好的运行轨迹运行,无需专业人员操作,也不会碰撞拦污栅,在水下工作时尤为可靠。同时设有两种操作模式可供选择,清理栅前较远处的大部分污物时,可选择快速模式,该操作模式抓斗离拦污栅有一定距离,不需要与栅条配合,快速模式有利于提高清污效率。大部分污物清理完成后,需要清理缠绕栅条上的污物,选择低速精准模式,抓斗齿尖插入栅条间隙,将污物梳理清除,以达到拦污栅表面清污效果。
四、设备的应用
淮水北调工程拦污闸前期未配备清污设施,在工程建成全线试通水期间,栅前污物堆积严重,普通的液压抓斗式清污机从以前的工程运行经验来看清污效果不佳,故后期在该工程北陀河、娄宋站、侯王站拦污闸根据现场土建布置情况配备智能抓臂式清污机。目前安装完毕并投入初步运行,对栅前清污效果良好,运行可靠,安全稳定。设备运行的自动化程度较高,操作简单,仅需对控制系统进行简单的设置后即可投入自动运行。
五、结语
智能抓臂式清污机首次在安徽省大型水利工程设计投入使用,克服了传统清污机的部分不足,操作简单,自动化程度较高,布置紧凑,也为以后的大型水利工程清污设备增加了一定的选择空间,同时也体现了水利工程开拓、创新的设计理念
