对转桨和单桨空泡水筒噪声测量对比试验研究
2018-07-30杜选民刘竹青
曾 赛,杜选民,范 威 ,刘竹青
(1.上海船舶电子设备研究所 水声对抗技术重点实验室,上海201108;2.中国船舶科学研究中心,江苏 无锡 214082)
0 引 言
对转螺旋桨具有推进效率高、扭矩平衡等优点,被应用于水下高速航行体、高速快艇等[1]。单桨螺旋桨则被广泛应用在水面船舶上,如民船领域。近年来,水下目标的分类与识别技术备受各国声纳和舰船科研工作者的关注,用于水下监测系统、水下作战武器自导系统、水声引信的水声探测的目标分类识别技术,是研发水声对抗器材、水下探测系统、港口预警防御系统以及水下攻防设备的关键技术[2]。随着人类海洋活动的日益频繁,水下或者水上航行体的声隐身指标越来越重要,作为重要噪声源的螺旋桨始终是被关注的重点。已有的船舶噪声治理文献表明,舰船的三大水下噪声源中螺旋桨噪声对总噪声贡献最大[3]。从螺旋桨辐射噪声中提取与水下以及水面运动目标相关信号特征是分类水下目标的有效途径。为了探索螺旋桨空泡以及非空泡辐射噪声的水声信号特征以及相关的信号处理方法,比较对转螺旋桨和单桨在辐射噪声上的差异性,研究螺旋桨噪声测试的实验方法以及获得对转螺旋桨和单桨的辐射噪声数据是十分必要的。目前,与航空领域对螺旋桨噪声的研究相比,学术界对于水下螺旋桨空泡以及非空泡噪声的产生机理和模型建立尚不成熟和完备,还不能精确预报螺旋桨的空泡和非空泡噪声谱级,加之海试实验存在设备和人力成本高昂的问题,且水声环境的影响不易控制,故在研究的初期采用符合ITTC(国际拖曳水池会议International Towing Tank Conference)国际标准的水筒试验方式是经济可行的,且不断有科技工作者在大型空泡水筒或者减压水池等设备中来探索螺旋桨的空泡和非空泡噪声特性,试图发现螺旋桨的辐射噪声规律[4]。
众多国内外研究人员在空泡水筒或水洞中应用缩比模型针对螺旋桨空化噪声进行了试验研究[5]。ITTC亦给出了进行水筒噪声测试的注意要点和进行水洞试验的相似准则,并且逐步成为此后水洞和水筒噪声测试的准则[6]。国内科研工作者也利用水筒或水洞设备对螺旋桨噪声进行了探索,突出的工作来自于中国船舶科学研究中心的朱锡清[7],其利用空泡水筒测试了不同对转桨的噪声和水动力性能,得到了一系列关于对转桨噪声特性的研究成果。曾赛[8-10]针对对转螺旋桨的无空化噪声进行了深入的理论分析,进行了数值仿真验证,并通过空泡水筒试验验证了理论分析和数值计算结果。杨勇等[11]利用中型空泡水筒对单桨的空泡噪声进行了测量,提出了利用横向和垂向加速度计进行噪声消除的技术。冯源等[12]利用水洞研究了螺旋桨在加速状态下的辐射噪声特征。胡健等[13]利用水筒测试了单桨的空泡噪声以此来验证其空泡数值模型。
然而,已有的研究工作都是针对单一桨型展开模型试验,对转桨和单桨由于结构上的差异,其辐射噪声谱在结构上也应该存在差异,尚没有公开文献表明有人对此展开过对比研究。本文讨论了在ITTC准则下空泡水筒测量螺旋桨噪声的试验条件,提出了相应的试验工况设计方法,针对水筒测量信号局限性的问题,提出了多频段调制谱处理方法的信号处理手段,提取了对转桨和单桨在空泡以及非空泡工况下的低频调制线谱,比较了二者的特征,为进一步的试验、信号特征和处理方法奠定了基础。
1 试验介绍
1.1 试验水筒简介
为了比较研究对转桨和单桨分别在空化和非空化状态下辐射噪声的水声信号特征,在中国船舶科学研究中心的大型空泡水筒中进行了对转桨和单桨的空化和非空化辐射噪声测量试验。该大型空泡水筒实验段的体积为3.2 m×0.8 m×0.8 m,水筒可以进行较大范围内的压力调节,水流速度范围为2~20 m/s,流速不均匀度小于1%,最小空泡数为0.15。空泡水筒工作段示意图如图1所示。
空泡水筒实验段的侧壁安置有体积为1 m×0.6 m×0.6 m的水声测量消声舱,为了尽可能减少水流湍动对噪声测量的影响,在水筒实验段的侧壁上采用有机玻璃透声窗将水声测量消声舱与实验段隔离,在数据处理阶段,可以忽略有机透声窗对声信号传播的影响。水声舱体积较为狭小,不能产生开阔水域的声场测量条件,为了减小壁面反射对噪声测量的影响,在水声舱内层四壁布满了消声尖劈。在消声舱与实验段相结合的部位安装有B&k8105标准水听器。采集的数据最终在显示屏上呈现。以上的性能指标使得该大型空泡水筒能够用于进行螺旋桨噪声测试。
1.2 试验桨模简介
本次实验拟在空泡水筒中测量对转桨和单桨在均匀进流条件下的无空化和空化辐射噪声信号。选用的对转桨桨模参数如表1所示,前桨为DTMB3686,后桨为DTMB3849。单桨桨模选用DTMB3686桨模。

图1 空泡水筒工作段的示意图Fig.1 Schematic diagram of cavitation tunnel working section

表1 实验模型基本参数Tab.1 The basic parameters of experimental model

图2 加工后桨模示意图Fig.2 Schematic diagram of propeller model

图3 桨模型安装图Fig.3 Schematic diagram of mounted propeller model
加工好的桨模如图2所示。对转桨的前后桨采用不同的动力仪进行驱动,前桨用直流动力仪驱动,后桨用斜流动力仪驱动。模型安装如图3所示。
2 试验方法和工况设计
2.1 试验准则
根据ITTC的建议和中国船舶科学研究中心的试验规程,在该大型空泡水筒中进行对转桨桨模试验时,前后桨安装在空泡水筒的转动轴上,前桨使用同轴的长轴动力仪驱动,后桨使用斜流动力仪驱动,斜流动力仪安装在筒壁上,前后桨的轴线就是旋转轴的中心线,安装的过程中要确保对转桨的前后桨相对来流水速无攻角和无漂角,前后桨的间距固定,前后桨在轴上通过键槽固定牢固,确保在试验中前后桨在来流的冲击下不出现抖动。为了确保水筒中水流的“纯净”,在桨模安装好以后,需要进行一段时间的除气处理,因为溶于水中的空气等效于气核,气核的存在将直接影响到对转桨以及单桨的空泡起始,这对于非空化噪声的测量试验是不利的;若不进行除气处理,一旦产生一定程度的空泡,这部分气核空泡会阻止其他部分空泡的崩溃,影响测量的总噪声级,还会直接影响到声学介质的特性,这对于空泡噪声的测量试验是不利的。试验测量开始之前进行排气处理,经过处理后,水筒中的气泡含量比为0.85。
为了模拟螺旋桨所在流场的真实情形,要求螺旋桨0.7R处雷诺数超过临界雷诺数[6],即,

式中:va为螺旋桨前进速度;C0.75R为0.75R处桨叶切面弦长;R为螺旋桨半径;n为螺旋桨转速;D为螺旋桨直径;ν为水的运动粘滞系数。在试验开始前的参数设计阶段要考虑到这些准则的要求和限制,使设计的参数满足准则要求。
2.2 试验平台搭建
在空泡水筒中进行螺旋桨噪声测试试验,包含有两部分系统的搭建,第一部分是动力仪部分,在对转桨噪声测量时,前桨使用直流长轴动力仪驱动,后桨使用斜流动力仪驱动,如图3所示;第二部分为水声信号的采集与分析部分,采用注水舱单水听器测量的方法。试验测量平台的原理如图4所示。试验中,为了观察桨叶表面的空化情形以及附近的流场形态,采用频闪仪辅助观察。图5为显示螺旋桨转速的装置,结合该装置给出的螺旋桨转速便可以调节频闪仪辅助观察螺旋桨桨叶表面的流场以及空化情形。

图4 试验测量平台示意图Fig.4 Schematic diagram of the experimental measurement platform

图5 转速显示与频闪辅助观察设备Fig.5 Schematic diagram of speed display and auxiliary stroboscopic observation equipment
2.3 试验工况设计
根据1.1给出的试验准则以及试验条件,对转桨和单桨非空化和空化噪声测试的工况设计步骤为:
(1)根据螺旋桨尺寸以及动力仪量程初步估算空泡水筒中进行螺旋桨试验时的极限转速,为了避免给动力仪带来损坏,螺旋桨的设计工况转速不能高于该极限转速。
(2)结合螺旋桨的水动力性能曲线和极限转速的限制,计算起始试验的参数,即水筒来流速度、水筒压力调节值、空泡数和模型桨起始转速。确保模型桨能够满足临界雷诺数的要求。
(3)只有桨毂时噪声的测量。在进行有桨噪声测试之前,针对每一种工况下的桨毂噪声进行单独测量,方便与有桨叶时的噪声进行比较研究。
(4)保持水筒压力和来流速度不变,调节控制平台的螺旋桨转速控制按钮,使转速达到设定值,待稳定后获得螺旋桨噪声水筒试验数据。
3 试验结果与数据分析
3.1 试验工况
空泡水筒在设定水速和固定加压情形下,通过调节转速控制按钮使得螺旋桨处于试验工况。对转桨和单桨的噪声试验工况如下表所示。表2中,A表示对转桨的工况1,即只有前后桨毂转动时的噪声,称之为对转桨背景噪声工况;B表示对转桨噪声测试工况,其中B-5为对转桨空化工况;含气比是指空泡水筒经过排气处理后,水筒的含气量与原含气量的比值;进速系数按照定义计算而来,此时的进速系数是指前桨的进速系数,当试验的水流速度和对转桨转速确定后便可以计算得到进速系数;下表3中的项目意义与表2一样,其中C表示单桨背景噪声工况,D为单桨噪声测试工况。D-5为单桨空化工况。

表2 对转桨噪声试验工况表Tab.2 The noise test table of counter-rotation propeller
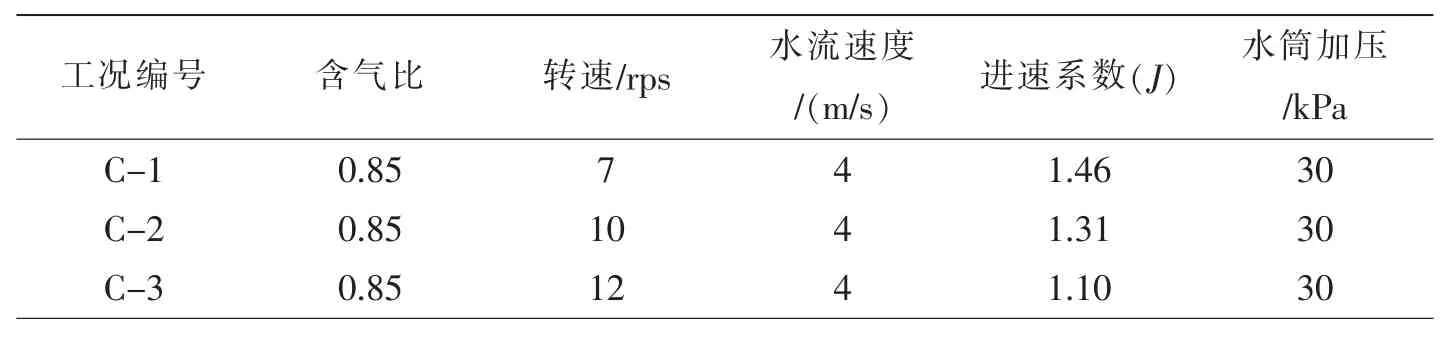
表3 单桨噪声试验工况表Tab.3 The noise test table of single propeller

续表3
3.2 对转桨和单桨声压频谱比较
在空泡水筒中进行螺旋桨噪声测试试验,应遵守ITTC给出的规范准则,即声模数准则。

式中:N为声模数,c为水中声速,f为噪声频率,V为实验段体积。利用本试验使用的空泡水筒参数可以计算得到,可以利用的噪声频段为800 Hz以上。本试验利用的噪声测试频段为800 Hz~63 kHz。
按照表2和表3给出的工况情形,分别测量离桨盘面0.642 m处的螺旋桨噪声,其中对转桨测量为前桨的盘面处。对所测得的噪声时域信号进行1/3倍频程分析,得到各类工况下的1/3倍频程功率谱如下图所示。图中直接从水筒的有效频段开始作图,去掉了800 Hz以下部分,n为螺旋桨转速,rps表示转每秒。为了作图美观,横坐标使用对数坐标。

图6 对转桨A工况桨毂1/3倍频程功率谱Fig.6 Schematic diagram of 1/3 octave spectrum of counter-rotation propeller hub

图7 单桨C工况桨毂1/3倍频程功率谱Fig.7 Schematic diagram of 1/3 octave spectrum of single propeller hub
如图6-7所示为对转桨和单桨桨毂在试验空泡水筒中1/3倍频程功率谱曲线。从图中可以看出,无论是对转桨还是单桨,其桨毂噪声在整个测量频段上均有分布,动力仪桨毂噪声在不同的频段上分布有较大差异,随着轴转速的升高,背景噪声级逐渐增加,在测量的频段内,对转桨典型工况下的总背景噪声级分别为109.1 dB、112.8 dB、115.1 dB、116.2 dB和120.8 dB;单桨典型工况下的总背景噪声级为100.7 dB、103.8 dB、104.6 dB、105.6 dB和109.3 dB。从中可以看出,由于对转桨后桨桨毂的转动,使得对转桨的背景噪声比单桨大9~11.5 dB,驱动后桨转动的斜流动力仪对整个背景噪声贡献较大。对转桨和单桨的桨毂背景噪声存在一些特征,首先,在3.8 kHz和8 kHz附近均存在功率谱峰值。其次,对转桨背景噪声在800 Hz~10 kHz频段内噪声功率谱较高,10 kHz~30 kHz频段内噪声功率谱按照倍频程10 dB衰减,在30~63 kHz频段内为高频连续谱,对转桨噪声衰减非常缓慢;单桨的背景噪声频谱特征与对转桨的基本一致。

图8 对转桨非空泡工况1/3倍频程功率谱Fig.8 Schematic diagram of non-cavitation 1/3 octave spectrum of CRP

图9单桨非空泡工况1/3倍频程功率谱Fig.9 Schematic diagram of non-cavitation 1/3 octave spectrum of single propeller
图8 所示为对转桨模在非空化工况下的噪声1/3倍频程功率谱,在非空化工况情形下,总噪声级随着转速的升高而增加,在测试频段内总声级分别为116.8 dB、119.2 dB、126.2 dB和131.1d B。在800 Hz~5 kHz频段内,噪声功率谱存在两个峰值,这与水筒自身特性有关,主要由水筒的混响造成,详见3.3节。在5~40 kHz频段内,噪声功率谱呈现稳定的衰减特性,在测量工况情形下以每倍频程9.25~10.5 dB规律快速衰减,至40 kHz时,噪声功率谱趋于稳定;对比图8和图6所示的对转桨背景辐射噪声频谱,可以看出,在800 Hz~63 kHz频段内,对转桨噪声级比背景噪声高5 dB以上,说明测试信号具有较好的信噪比。在1.8 kHz和3.8 kHz附近,有桨时的谱峰值明显高于无桨时的背景噪声。
图9所示为单桨桨模在非空化工况下的噪声1/3倍频程功率谱。其噪声级随转速而变化的规律与对转桨一致,在测试频段内,典型工况对应的总噪声级分别为110 dB、113.4 dB、118.6 dB和132.2 dB。在800 Hz~5 kHz频段内存在两个明显的峰值,分别在3.8 kHz附近和8 kHz附近,这两个峰值产生的原因与对转桨非空化噪声功率谱曲线中峰值产生的原因是不同的,详见3.3节。单桨转速为14 rps时,在8 kHz附近产生非常剧烈的峰值,高出背景噪声达40 dB,原因是此时单桨发生了“唱音”效应,在试验测试中也听到了单桨螺旋桨发出的“啸叫”。在10~40 kHz频段内,噪声功率谱呈现稳定的衰减特性,在测量工况情形下以每倍频程11~14 dB规律快速衰减,至40 kHz时,噪声功率谱趋于稳定;比较图9和图7所示的单桨背景辐射噪声频谱,可以看出背景辐射噪声较高,在800 Hz~3 kHz范围内,信噪比在1~3 dB,至3 kHz以后,信噪比大于6 dB,说明测试信号具有较好的信噪比。
比较图8和图9对转桨和单桨的非空化噪声功率谱,可以发现其在噪声级、噪声衰减特性、信噪比和频谱峰值上存在差异。在相同工况下,对转桨非空化噪声级明显高于单桨非空化噪声级。这是由于后桨的存在以及流场特征差异造成的;在噪声衰减特性上,二者基本一致,单桨的非空化噪声每倍频程的衰减要大于对转桨非空化噪声;在800 Hz以上的研究频段,空泡水筒中对转桨非空化噪声的测试信噪比要优于单桨;频谱峰值上,对转桨的频谱峰值集中在5 kHz以下,主要与空泡水筒自身的结构特征有关,单桨的频谱峰值除了与水筒自身结构特征有关,与桨模自身的特征有关。

图10单桨与对转桨空泡工况1/3倍频程功率谱Fig.10 Schematic diagram of cavitation 1/3 octave spectrum of CRP and single propeller
图10 所示为单桨和对转桨空化工况下噪声测试结果,从中可以看出,空泡工况下,对转桨和单桨的1/3倍频程功率谱曲线变化趋势基本一致,在3.8 kHz附近均存在频谱峰值,这主要与水筒自身的结构特征有关。5~40 kHz频段内,噪声倍频程衰减值比非空泡工况下要小,对转桨和单桨的空泡工况下倍频程噪声级按照6 dB衰减。
3.3 空泡水筒自身特征自振频率的影响
根据对图6~10的单桨和对转桨噪声1/3倍频程功率谱图分析可知,在1.8 kHz(图8)、3.8 kHz(图6~10)和 8 kHz(图 7、图 9)附近会出现峰值谱线。 根据 Ross的《Mechanics of Underwater Noise》[14],这是由空泡水筒的特征频率所决定的,声波在有限体积内传播会产生振荡现象。空泡水筒的特征自振频率为:

其中:nx,ny和nz为空泡水筒边壁的方向余弦,lx,ly和lz为水筒三个方向的特征尺度,C为此时水中声速。对于试验使用空泡水筒,三个方向的特征尺度分别为0.4 m、0.4 m和1.6 m,水中声速取C=1 450 m/s。当取水筒x方向的筒壁方向余弦值为0.5,y方向的筒壁方向余弦值为0,z方向的筒壁方向余弦值为0时,f=1.86 kHz;当取水筒x方向的筒壁方向余弦值为1,y方向的筒壁方向余弦值为0,z方向的筒壁方向余弦值为0时, f=3.7 kHz;计算说明,该空泡水筒的特征自振频率为1.86 kHz和3.7 kHz,试验值在该值附近会出现异常现象,事实上,由图6~10中,在1.8 kHz和3.8 kHz附近出现了峰值谱线。而单桨测试中在14 rps时在8 kHz时出现非常高的峰值,这是由单桨自身的“唱音”所引起。
3.4 调制特征线谱分析
螺旋桨噪声中有本质上存在的一些特征,这些本征特征对于水下以及水面目标的识别具有重要意义,线谱特征又称为“声纹”特征,是一些稳定的离散线谱分量,其不会随着背景噪声的增加而消失。大量的文献研究表明,螺旋桨的低频离散线谱对高频连续谱存在调制作用[15-18]。由于水筒测试噪声的局限性,使得800 Hz以下的低频噪声没有足够的信噪比,无法直接使用传统的傅里叶变换分析螺旋桨低频离散线谱。3.2节的分析表明,空泡水筒中对转桨噪声在800 Hz~40 kHz频段内具有良好的信噪比,单桨噪声在3~40 kHz频段内具有良好的信噪比,可以使用DEMON(Detection of Envelope Modulation On Noise)分析方法处理具有良好信噪比的中高频段噪声,解调出低频特征线谱。DEMON特征具有明确的物理意义,可以获得螺旋桨不变的物理特征,如确定螺旋桨的轴频、叶频甚至叶数等。然而,不同频段内的解调效果是不同的,本节采用多频段调制谱处理有良好信噪比的实验数据。多频段调制谱方法流程图如图11所示。

图11 多频段调制谱理论框图Fig.11 Schematic diagram of multi-band modulation spectrum theory
对单桨和对转桨的非空泡工况7 rps和14 rps以及空泡工况18 rps测量数据进行多频段调制谱分析,得到的这三个工况下的调制谱如下图所示,其中,选择的解调区间为3~40 kHz,划分的子带带宽为1 kHz,横坐标为频率,频段为0~1 kHz,纵坐标为归一化幅度值,幅度的大小表示该线谱调制的深度。

图12 单桨7 r/s时全频带内的调制谱Fig.12 The modulation in whole band spectrum of single propeller in 7r/s
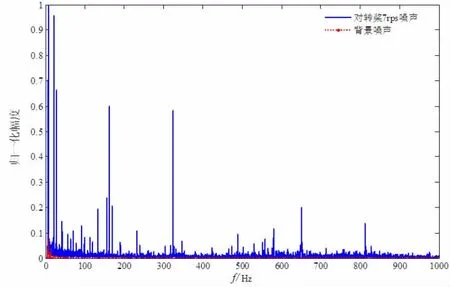
图13 对转桨7 r/s时全频带内的调制谱Fig.13 The modulation in whole band spectrum of CR propeller in 7r/s

图14 单桨14 r/s时全频带内的调制谱Fig.14 The modulation in whole band spectrum of single propeller in 14 r/s

图15 对转桨14 r/s时全频带内的调制谱Fig.15 The modulation in whole band spectrum of CR propeller in 14 r/s
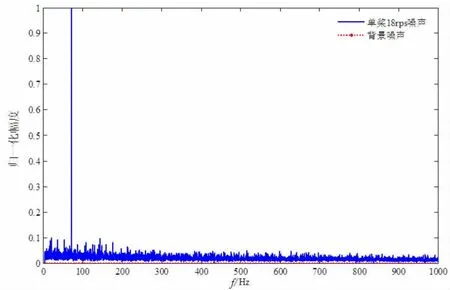
图16 单桨18 r/s时全频带内的调制谱Fig.16 The modulation in whole band spectrum of single propeller in 18 r/s

图17对转桨18 r/s时全频带内的调制谱Fig.17 The modulation in whole band spectrum of CR propeller in 18 r/s
图12 所示为单桨在7 rps工况下的调制谱。从中可以看出,单桨一阶叶频的调制作用最强,其低频调制线谱的频段主要集中在200 Hz以下,低频调制线谱比较单一,且频段较窄。图13为对转桨在7 rps时的调制谱,从中可以看出,对转桨在低频段的调制线谱要比单桨的低频调制线谱丰富得多,对转桨前后桨一阶叶频的组合调制作用最强,对转桨调制线谱的频段分布范围较广,在0~1 kHz的频段内有丰富的调制线谱出现。图14与图15分别为单桨和对转桨在14 rps工况时的调制谱,从中可以看出,其对比规律与图12和图13的对比规律一致。
图16所示为单桨在18 rps空泡工况下的调制谱。从中可以看出,在空化情形下,单桨一阶叶频的调制作用最强,其调制线谱的分布频段仍然较窄且较为单一。图17为对转桨在18 rps时的调制谱,从中可以看出,在空泡工况下,对转桨前后桨一阶叶频的组合的调制作用最强,且其调制谱分布频段比单桨的调制谱分布频段广,调制线谱的数目也较为丰富。
3.5 单桨与对转桨空泡发展情形
设计工况B-4为对转桨发生初生空化的工况,B-5为对转桨发生梢涡空化的工况;D-4为单桨发生初生空化的工况,D-5为单桨发生梢涡空化时的工况。借助于高分辨率摄像机,在高速频闪仪的辅助下,可以观察到发生在对转桨和单桨叶面上的初生空化和梢涡空化,如图18和图20所示。此时对转桨的桨叶随边处面上出现弱空化,但是空化面积非常小,处于初生空化状态,随着转速的增加,对转桨和单桨的梢涡涡核压力进一步降低,空化进一步生长,如图19和图21所示。由于前后桨的相互干扰,使得对转桨的涡线分布发生紊乱,如图19所示。在梢涡工况下,涡尾迹出现明显的收缩现象。

图18 对转桨初生空化Fig.18 The initial cavitation of CR propeller

图19 对转桨梢涡空化Fig.19 The tip vortex cavitation of CR propeller

图20 单桨初生空化Fig.20 The initial cavitation of single propeller

图21 单桨梢涡空化Fig.21 The tip vortex cavitation of single propeller
4 结 论
在大型空泡水筒中测量了单桨和对转桨的非空化以及空化噪声,通过比较二者噪声特性的差异性,以期为水下目标识别和分类提供判断依据。且针对测试使用空泡水筒的特性进行了探讨。得到如下结论:
(1)空泡水筒中的背景噪声较高,其中驱动后桨的斜流动力仪背景噪声最强。
(2)空泡水筒由于自身结构上的特殊性,在某些频率附近易出现噪声异常。
(3)对转桨和单桨在非空泡噪声上存在较大差异,表现在噪声级、噪声衰减特性、信噪比和三分之一倍频程谱峰值方面。在相同工况下,对转桨非空泡噪声级要比单桨高6 dB以上;对转桨非空泡噪声的倍频程衰减要略微小于单桨非空泡噪声的衰减;在该空泡水筒中,800 Hz以上的测试频段,对转桨噪声的测试信噪比要优于单桨;对转桨非空化噪声频谱在1.8 kHz和3.8 kHz附近出现了频谱峰值,这主要与空泡水筒的混响有关,而单桨非空化噪声频谱在3.8 kHz和8 kHz附近出现频谱峰值,其主要原因分别是混响和单桨“唱音”作用的结果。
(4)对转桨和单桨在空泡噪声上差异较小,其三分之一倍频程谱结构变化趋势基本一致。相同工况下,对转桨空泡噪声要高于单桨空泡噪声。
(5)对转桨和单桨的非空化以及空化多频段调制谱在结构上存在较大差异,单桨的多频段调制谱较为简单,其一阶叶频的调制深度最大,且调制频段较窄,一般在0~200 Hz。对转桨的多频段调制谱较为复杂,其前后桨一阶叶频的组合调制深度最大,调制频段较宽。
参 考 文 献:
[1]常 煜,洪方文,张志荣,等.对转桨水动力性能的数值分析[C]//2008年船舶水动力学学术会议暨中国船舶学术界进入ITTC30周年纪念会论文集.杭州:中国造船工程学会,2008.Chang Yu,Hong Fanwen,Zhang Zhirong,et al.Numerical study of contra-rotating propellers hydrodynamic performance[C]//The Ship Hydrodynamics Conference and The Shipbuilding Academic of China Step into The ITTC30 Anniversary Conference.Hangzhou:China Shipbuliding Engineering Society,2008.
[2]Johnson E.Unmanned under sea vehicles and guided missile submarines:Technological and operational synergies[D].Occasional Paper No.27,2002.
[3]张永坤.舰船螺旋桨辐射噪声预报研究[D].武汉:海军工程大学,2009.Zhang Yongkun.Investigation on predication ship propeller radiated noise[D].Wuhan:Naval University of Engineering,2009.
[4]Atlar M,Takinaci A C,Korkut E,et al.Cavitation tunnel tests for propeller noise of a FRV and comparisions with fullscale measurements[C]//Proc of the 4th International Symposium on Cavitation.Pasadena,2001:1-14.
[5]Park C,Seol H,Kim K,et al.A study on propeller noise source localization in a cavitation tunnel[J].Ocean Engineering,2009,36:754-762.
[6]ITTC.Cavitation committee report[C]//Proc of 18th ITTC.Kobe,1987:183-186.
[7]朱锡清,吴武生.水下高速航行体对转螺旋桨线谱噪声预报研究[J].声学学报,1998(2):124-132.Zhu Xiqing,Wu Wusheng.Prediction of line-spectrum noise induced by high speed vehicle counter-rotation propellers in water[J].Acta Acoustica,1998(2):124-132.(in Chinese)
[8]曾 赛,杜选民,范 威.水下对转桨非空化线谱噪声分析与数值研究[J].兵工学报,2015,36(6):1052-1060.Zeng Sai,Du Xuanmin,Fan Wei.Numerical simulation and analysis of non-cavitation noise line-spectrum frequency of underwater counter-rotation propeller[J].Acta Armamentarii,2015,36(6):1051-1060.(in Chinese)
[9]曾 赛,杜选民,范 威.水下对转桨无空化噪声调制理论分析与试验研究[J].声学学报,2017,42(6):641-650.Zeng Sai,Du Xuanmin,Fan Wei.Theoretically analysis and experimental research on non-cavitation noise modulation mechanism of underwater counter-rotation propeller[J].Acta Acoustica,2017,42(6):641-650.(in Chinese)
[10]Zeng Sai,Du Xuanmin.A semi-empirical modulation model on non-cavitation noise of underwater counter-rotation propeller[C]//2nd International Conference on Computational Modeling,Simulation and Applied Mathematics,October 22-23,2017.Beijing,China,2017.
[11]杨 勇,熊 鹰,时立攀.螺旋桨空泡噪声测量与分析[J].中国舰船研究,2013(1):85-90.Yang Yong,Xiong Ying,Shi Lipan.Measurement and analysis of the cavitation noise of propellers[J].Chinese Journal of Ship Research,2013(1):85-90.(in Chinese)
[12]冯 源,陶 然,卓智海.加速旋转螺旋桨噪声测试水筒试验研究[J].兵工学报,2010(12):1611-1616.Feng Yuan,Tao Ran,Zhuo Zhihai.Study on cavitation tunnel experiment of accelerating rotating propeller noise[J].Acta Armamentarii,2010(12):1611-1616.(in Chinese)
[13]胡 健.螺旋桨空泡性能及低噪声螺旋桨设计研究[D].哈尔滨:哈尔滨工程大学,2006.Hu Jian.Research on propeller cavitation characteristics and low noise propeller design[D].Harbin:Harbin Engineering University,2006.
[14]Ross D.Mechanics of underwater noise[M].Pergaman Press,New York,1976.
[15]汪德昭.水声学[M].第二版.北京:科学出版社,2009.
[16]熊紫英,朱锡清.基于LOFAR谱和DEMON谱特征的舰船辐射噪声研究[J].船舶力学,2007,11(2):301-308.Xiong Ziying,Zhu Xiqing.Ship radiated noise research based on the LOFAR spectrum and DEMON spectrum characteristics[J].Journal of Ship Mechanics,2007,11(2):301-308.(in Chinese)
[17]陶笃纯.舰船噪声节奏的研究(Ⅰ)-数学模型及功率谱密度[J].声学学报,1983,8(2):66-72.TAO Duchun.A study on ship radiated noise rhythms(I)-Mathematical model and power spectrum densidy[J].Acta A-coustica,1983,8(2):66-74.
[18]陶笃纯.舰船噪声节奏的研究(Ⅱ)-自相关函数及节奏信息的提取[J].声学学报,1983,8(5):281-288.TAO Duchun.A study on ship radiated noise rhythms(II)-Autocorrelation function and extraction of rhythm information[J].Acta Acoustica,1983,8(5):280-289.(in Chinese)