汽车安全开门及远近灯光切换装置
2018-07-26戴思镕何轩
戴思镕 何轩

今无人驾驶兴起,如何避免因为左侧开门撞倒后方电动车与远近光灯不恰当切换,从而保证行车安全,特研究制作汽车安全开门及远近灯光切换装置。
随着科技不断进步发展,无人驾驶变身香饽饽,巨头纷纷试水,目前虽然市场对无人驾驶相对谨慎,但是从长期来看,无人驾驶的市场前景不容小觑。为此我们思考如何更好地减少这些因素的影响,实现无人驾驶和传统驾驶并存的安全驾驶。特取频发事故的左侧开门撞倒后方行人及许多司机行车过程最容易遗忘的远近灯光切换进行研究,制作汽车安全开门及远近灯光切换装置。
原理样机的研究
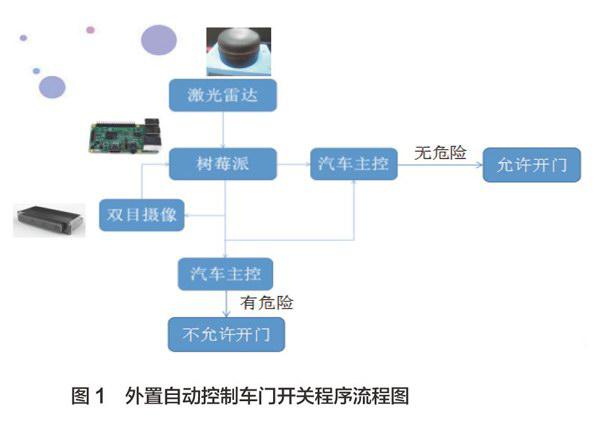
汽车开全开门原理及硬件组装。项目原理样机的主控连接着激光雷达,3D双目摄像头与汽车主控。激光雷达监测汽车周边移动物体与汽车的距离反馈给原理样机的主控,当达到与装置距离8m,角度为20°时,原理样机的主控打开3D双目摄像头进行环境扫描拍摄,将所获得的图像信号(即物体的形状)传输回原理样机的主控加强判断该物体是否为来人或来车,避免因其它没有危险的物体导致车门误锁;如果确定该物体是来人或者来车,原理样机的主控就发送信号给汽车主控,令汽车主控强制关闭原理样机自带的锁,避免车上的人因为没有意识到后方来车或者来人而突然下车导致的危险。外置安全开关车门程序流程如图1所示。
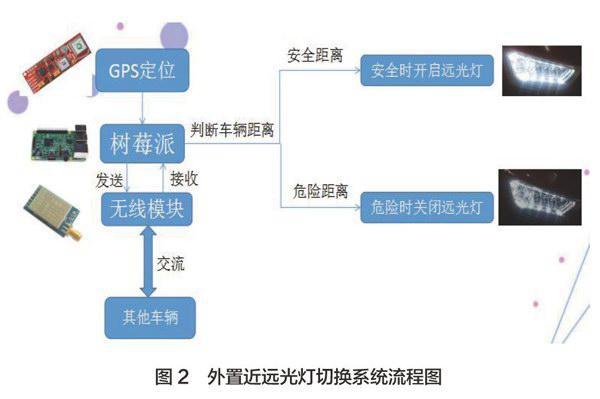
远近灯光自动切换原理及硬件组装。原理样机的主控上也连接着GPS卫星导航模块,2.4GUART串口转数传收发无线模块。GPS卫星导航模块可以不断更新汽车所在位置,将位置信息实时发送回原理样机的主控,原理样机的主控再将汽车的自身的信息通过UART光感模块传输给周边安装同款原理样机的汽车,同时接收周边也安装了同款原理样机汽车的位置、航向、速度等信息。当接受到本车与周边汽车的位置后计算两车距离和仰角,在危险范围时,原理样机的主控就强制汽车主控将远光灯切换为近光灯,会车结束后再自动将近光灯切换为远光灯,避免因不恰当开启远光灯而导致的事故。外置近远光灯切换系统流程如图2所示。
项目总结
综上所述,汽车安全开门及远近灯光切换外设原理样机实现了:
(1)实现了双标判断安全开车门障碍。通过激光雷达和3D双目摄像头两重配合来判断车门后方一定角度内会碰到的障碍是否为安全物体,如果不为安全物体则强制关闭车门直到危险解除,双重识别减少误判,提高精准度和效率。
(2)实现了交互会车信息,预判角度和距离,强制远近灯光切换。为了避免外界环境的干扰,采用GPS卫星导航深度判断汽车方位和速度,并通过2.4G无线收发模块交流信息,让原理样机的主控及时预判远近灯光切换的最佳时刻,让远近灯光切换更及时准确。
(3)以上两个功能实现汽车安全的外设装置的研究,避免因车主疏忽而导致远光灯的安全隐患,也避免了车主手动开关近远光灯切换原理样机此段反应时间中可能发生的
(4)我们即将进入无人驾驶与传统驾驶并存的时代,这项汽车安全开门及远近灯光切换装置能补充无人驾驶关于安全上下车及远近灯光切换的安全设置,给无人驾驶增加安全系数提供一定的参考作用。
目前本项目已通过教育部科技查新工作站的查新,项目原理样机也已经通过了泉州市一鸣交通电器有限公司的質量检测,并已与泉州市一鸣交通电器有限公司签订开发协议,还获得了国家实用新型专利授权。
