停车场实时语音导航及控制系统设计
2018-07-23阜阳师范学院计算机与信息工程学院刘飞彪马鑫康刘梦会王中心
阜阳师范学院计算机与信息工程学院 刘飞彪 马鑫康 刘梦会 王中心
0 引言
停车场管理系统是由微机、管控设备、网络设备搭建的一套对出入停车场车辆、引导车辆停车、计时收取停车费等进行管理的综合系统。近年来,我国已成为世界最大汽车生产国与消费国,据权威部门数据显示,截至2017年底,我国机动车总保有量达3.10亿辆。停车场管理系统能够实现对停车场内秩序的维持,极大的提高了停车场内车位的利用率,缓解当前停车困难的社会问题,因此其需求正在不断地上升。本文重点探讨了一种结合实时语音导航等功能的停车场管理系统的系统与软硬件设计。
1 停车场实时语音导航及控制系统的系统设计
1.1 系统功能设计
本系统采用MCS-51单片机为主控制器,车辆进入停车场时,主控制器控制RFID模块读取IC卡中的信息后智能为车辆分配最优车位,并将分配的车位和停车时间等信息写入IC卡芯片的对应区块;同时控制显示屏显示相关信息(欢迎语、剩余车位信息、相关费用等),随后语音模块播放到达分配车位的导航信息。在车辆寻找车位的过程中,关键道口放置的实时导航模块通过RFID技术检测到持有IC卡的车辆经过时,自动读取IC卡中存储的车位信息并通过语音模块播放对应的实时语音导航信息(例:前行、转弯等),当车辆到达指定车位时,系统检测到入库正确后舵机控制升降杆,允许车辆进入;用户取车时,可通过查询模块刷卡查询车辆停放位置,方便用户寻找车位。
1.2 系统总体结构图(见图1、图2、图3)
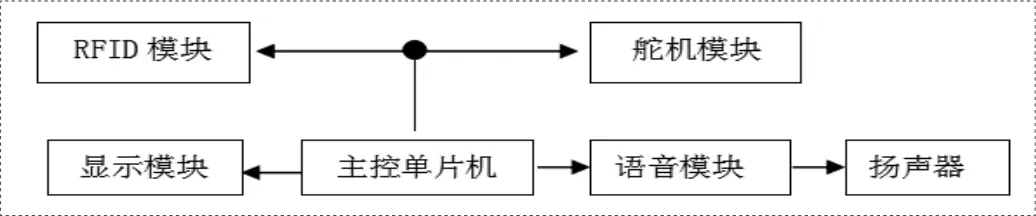
图1 主控模块
2 停车场系统的硬件设计
2.1 RFID模块
本系统的RFID模块采用RFID-RC522非接触式读卡器IC芯片。该芯片的射频识别是一种无线数据通信技术,它成功地结合射频技术和IC卡技术。该芯片具有64字节的发送和接收FIFO缓冲区,ISO14443 212kbit/s和424kbit/s的更高传输速度的通信,足以满足系统对于检测读写模块的需求。
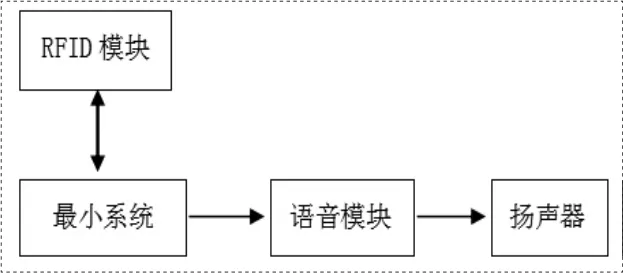
图2 导航模块
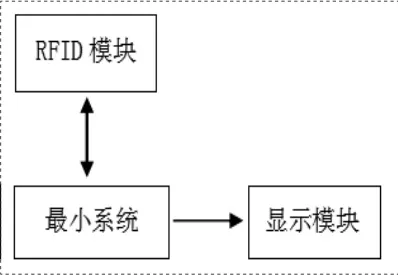
图3 查询模块
2.1.1 主要特征
该模块能可靠的识别高速移动或静态目标;识别区域广,无方向性,同时具有无盲区的特性。具有强信号穿透力与高度的安全性与保密性;便于安装和维护。数据保存期长,存储信息可改写10万次,无限次读。
2.1.2 防冲突措施
当RFID模块识别范围同时出现多张IC卡时,防冲突措施会从这些IC卡中选择一张进行操作,其余IC卡则处于空闲模式并等待在下次选卡过程被选中,同时被选中IC卡的序列号将被返回;该机制可有效解决多辆车同时出现在RFID模块识别范围的情况。
2.2 显示模块
系统的显示模块采用LCD12864液晶显示屏,此显示屏分辨率为128*64,内置中文字库,可满足系统显示的基本需求。显示屏由三个引脚RS、RW和EN控制基本命令的发送与八个数据引脚实现三态数据线功能,另外LCD12864液晶显示屏还可以调节对比度,背光亮度。
2.3 语音模块
系统语音模块采用JQ8900芯片。该芯片支持SPIFLASH 模拟成U 盘,直接像操作U 盘一样更新SPIFLASH 里的语音;并支持MP3 WAV 硬件解码,指定曲目序号播放,以及音量设置等功能;此模块使用方便,可以满足系统对语音导航的需求。
2.4 舵机管控模块
系统舵机管控模块采用Futaba S3010舵机实现相关功能,此型号舵机具有扭矩高,成本低的特点,其工作电压为6v,通过单片机控制高电平脉宽即可实现对舵机的控制。舵机旋转位置与高电平脉冲时间的关系如表1所示:

表1 舵机旋转位置与高电平脉冲时间的关系
2.5 主控模块
主控模块以STC11系列的51单片机为核心。其可在3.3V-5.5V的电压下工作,内置的掩模ROM程序存储器大小为32KB, RAM数据存储器的大小为1024字节的,共有32条I/O线(4个8位并行I/O串口),工作的频率为0-35MHz,并具有硬件看门狗,掉电唤醒专用定时器,启动掉电唤醒定时器,全双工异步串行口等功能,可以满足对于控制系统的需求。
3 停车场系统软件设计
3.1 具体软件模块及功能
[1] 中断处理函数:void XTimer0Init(void) interrupt 1
功能:记录停车时间以及其他模块需要
[2] 延迟函数:void Delay1us(int T)
功能:用于单片机和其他模块的串口通信延迟等需要
其他说明:不同的模块函数中可能用到的延迟函数有所不同,但大体都是一样的
[3] 初始化函数:void Start_up() ;LCD12864_Init()
功能:用于显示、语音各模块的初始化
[4] 写卡函数:void Write_card()
功能:向IC卡中写入信息。
[5] 读卡函数:void Read_card()
功能:读取IC卡中的信息。
其他功能:读取M1卡一块数据:char XPcdRead(unsigned char oddr,unsigned char *pData);
[6] 语音函数:void XSound(u8 m,u8 n); void XSendData (u8 addr)功能:控制语音播放。
[7] 舵机函数:void XFutaba()功能:控制舵机的转动。
[8] 扫描函数:void Xscan()
功能:扫描结构体的所有属性(所有停车位在一个二维数组中实现,数组中的每个项是车位的所有属性的结构体,扫描结构体的每一个属性,判断改变的数值,实现不同控制)。
[9]主要函数:void main()
功能: 构建函数,连接函数,实现各个功能
其他说明:此函数具体实现各个模块的初始化;用户存车时,完成车位的分配与分配情况记录;实现对显示函数、语音函数的调用;车辆入位时,调用舵机函数;用户查询车位时,调用读卡、显示函数;用户取车时,调用读写卡、显示、语音函数。语音导航、字符显示、用户信息等内容分别储存在特定的内存空间中。
3.2 系统处理流程
主控单片机处理过程如图4所示。
其他说明:系统中的RFID模块分为两种:一种是远距离RFID模块,停车场的关键道口放置实时语音导航模块采用此种模块,以实现车辆在行驶过程中无须开窗即可提供实时语音导航服务;另一种是近距离RFID模块,舵机管控模块的RFID功能采用此模块,避免远距离检测造成的误识别情况的发生。

图4 主控单片机处理流程图
4 系统测试
测试使用五张已经写好数据的IC卡模拟车辆进入与离开停车场的全过程进行测试测试结果如表2所示:
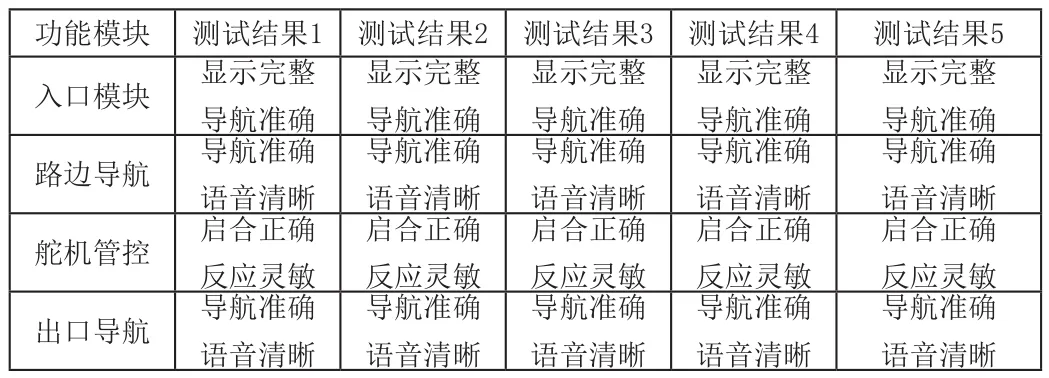
表2 测试汇报表
综上,五次测试均符合系统要求,各模块工作正常。
5 结语
停车场语音实时导航管理系统具有实施简单、智能便捷和人性化等优点。在大型停车场的停车高峰期时,停车、取车时,停车位的寻找较为困难,此系统巧妙的解决了这些问题。此外,灵活多变的经营方式,轻松方便的使用体验,简单可行的硬件设备,不算高昂的安装成本,使本系统具有良好的市场前景。
