浅析术中导航系统
2018-07-23马宝秋
马 宝 秋
(石家庄职业技术学院 机电工程系,河北 石家庄 050081)
术中导航技术是利用计算机、3D算法、光学、电磁等技术手段,在医生手术过程中,通过计算机屏幕提供直观的、图像融合的关键组织或器官位置,以及手术器械位置等信息在内的手术场景的图像,以辅助手术实施的一种计算机辅助方法.术中导航技术有很多优点,例如:增加术中病人的安全[1],减少并发症,增加医生对解剖结构的理解[2],提高临床医生手术的信心,降低手术的难度等,对促进临床手术的发展具有重要的意义.
1 术中导航技术的作用
目前,微创手术以其特有的优点应用于大部分的手术中,并促进了术中导航技术的发展.对于颅部和耳鼻喉的手术,由于手术时间短,手术部位软组织较少,很少发生器官大幅度变形,各个组织器官移位不明显,即使有变形,变形也很小[1,3].但是对于人体腹部的手术来说,因为人体腹腔内均为软组织,没有骨骼的支撑,所以任何外部的压力均会使腹腔内的肝脏、肾脏等软组织发生形变,甚至血压都会影响像肝脏这样的软组织外型[3],胸、腹腔内的一些重要器官其外表又没有详细的外部特征[2],所以在胸、腹腔的微创手术中必须引入导航技术来克服变形所引起的手术误差.
2 不同导航系统性能比较
在微创手术过程中,为达到与术前图像的配准与融合,指导临床医生正确手术的目的,可以选择使用不同的术中导航系统.目前导航系统的应用过程中,精度要求至少要高于1.5 mm[4].神经外科的导航精度要求达到0.35 mm[5].不同导航系统性能比较见表1.
在光学导航系统产品中,文献[6]认为A.R.T.Track1系统性能最好.在电磁导航系统产品中,文献[6]认为小的铁磁手术器械对电磁导航系统的干扰不大,关键在于选择合适的器械;文献[4]中使用了3种常用的手术器械:带手柄的牙钻、超声探头、Langenbeck hook(兰根贝克钩),证明对Treon-EM系统和Aurora系统的影响在可接受的范围内;文献[7]认为将金属物体放于Aurora系统的场发生器半径为1 m的范围外,可使位置RMS(均方根)达到1.5 mm,方位角RMS达到0.5°,并认为该系统在CyberKnife设备中可以安全使用.
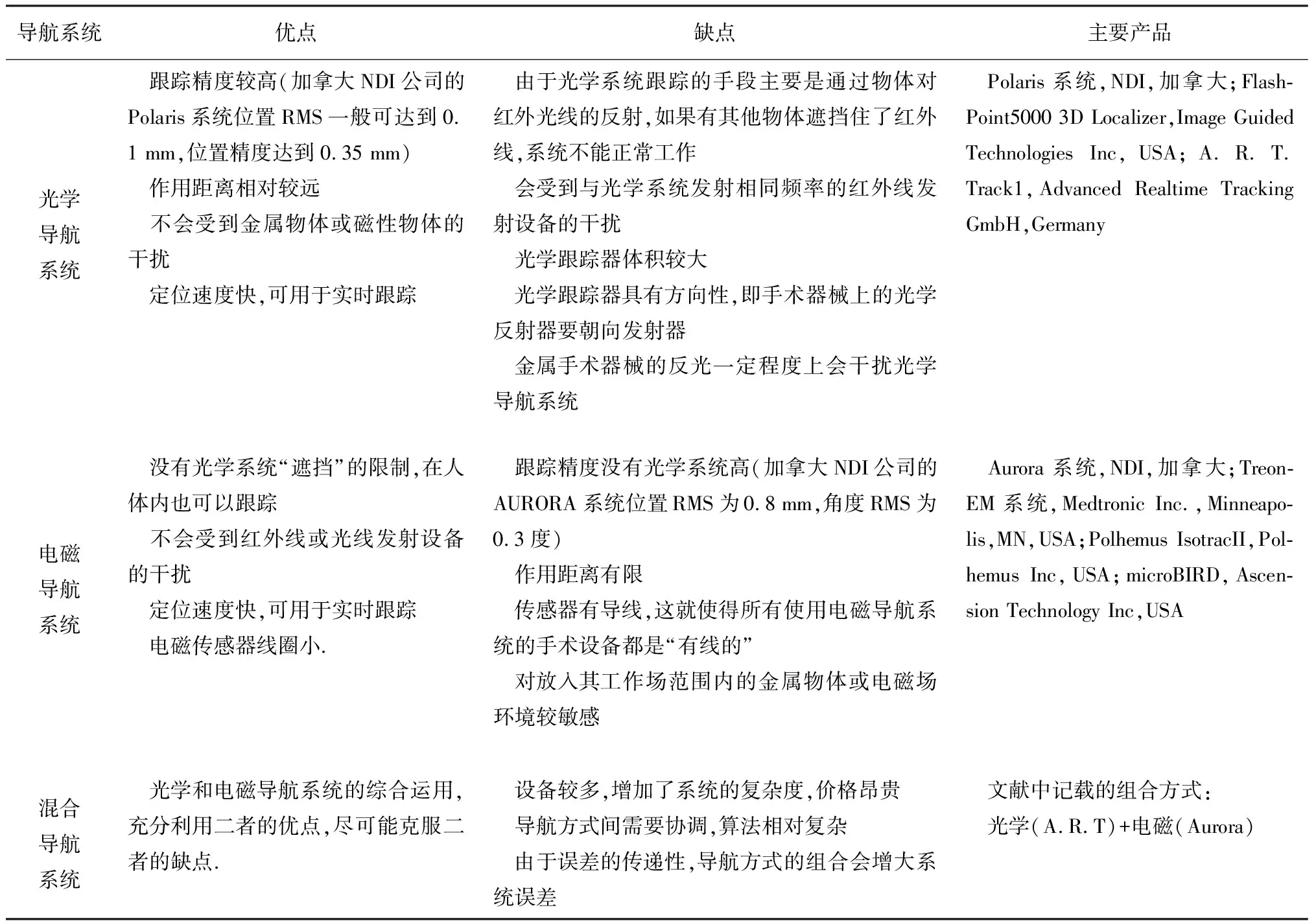
表1 不同导航系统性能[1-10]比较
3 电磁导航系统抗干扰措施
在实践应用中,由于光学导航系统受限较多,所以目前普遍应用电磁导航系统.但是电磁导航系统在实际使用过程中会受到外界金属和电磁环境的干扰,为减少干扰,可以采取以下措施:
(1)金属屏蔽
将病人与电磁场发生器同时放置在一个金属罩内,金属罩可以屏蔽环境金属影响和环境电磁场干扰,但同时也会限制手术范围.
(2)提高信噪比及工作频率
根据电磁理论,当电磁场发生器的功率达到环境噪声功率的百倍以上时或发射频率不同时,噪声的干扰会显著减小,所以可选择调整电磁导航系统的信噪比及工作频率,提高其抗干扰能力.
(3)交替使用金属器械和电磁导航设备
在手术过程中,交替使用金属器械和电磁导航系统,使电磁导航系统与可能的干扰源不同时工作,可有效避开金属器械的干扰.但该方法理论上会存在一定的误差,首先,因为导航系统与手术器械的工作不同步,导航坐标的系统误差较大;其次,由于采集导航坐标时,金属器械仍在有效电磁场环境内,对电磁场环境仍会有一定影响;再次,因为交替使用设备,导致术中工作量加大,操作繁琐.
(4)减少环境中干扰物体的数量
术中使用导航时,在电磁导航系统有效工作范围内尽量减少或杜绝金属、磁性物体存在.
(5)适当调整数据采样和传输速率
调整电磁导航系统数据采集频率,使其达到合适的速度,同时优化传输数据的速率,能从一定程度上减少系统误差,提高抗干扰能力.
以上方法有利有弊,在手术过程中,可根据实际情况和要求采取相应的抗干扰措施.
4 结语
术中导航技术是一门新兴的医学与工学交叉的技术,其应用前景十分广阔.目前,我国在术中导航方面与国际水平仍然存在明显的差距,需要投入更多的资源,加强核心技术研究,提高系统的动态跟踪速度,解决人体生理运动对定位精度的影响,从而为临床医学提供更优秀的产品.
