摆臂前置救援机器人运动特性分析
2018-07-19罗建国卜泽昊
罗建国,卜泽昊
(1.华北科技学院 机电工程学院,北京 101601;2.华北科技学院 研究生院,北京 101601)
1 引言
近些年,自然灾害如地震,煤矿井下安全生产事故,危化品泄漏、爆炸事故,核事故,日常生活中的火灾、管道爆炸等事故均威胁着人民的生命财产安全。救援机器人的研究极大提高了救援人员对事故现场的勘察与救援工作的开展,并且减少二次灾害对于救援人员的伤害。国内外对各类救援机器人已经进行大量深入的研究,各种机器人均应用在高危和救援的场合,其中美国PackBot和Warrior系列机器人、日本Quince系列、日本东芝公司的蝎型机器人均应用于2011年日本福岛核电站泄漏事故后的检查探测任务[1]。中国矿业大学研制了CUMT-Ⅰ到Ⅳ系列煤矿救援机器人,每代机器人均在履带结构、摆臂数量等方面作出优化[2]。文献[3]对四履带两摆臂机器人的越障机理进行运动学分析,并以CUMT-Ⅱ验证理论的运动能力。文献[4]以动力学为基础对自主研制的四履带两摆臂机器人的爬楼梯机理进行分析,并进行实验对机构优化设计提供基础。文献[5]用D-H方法建立救援机器人越障高度与车身转角、摆臂摆角的关系,文献[6]建立了六履带机器人的越障高度模型,但均未对质心水平位移越障条件进行分析。文献[7-8]对各校所研究的履带机器人进行ADAMS仿真验证其运动性能。尽管已开展大量的研究,但目前救援机器人仍多处于试验样机研制,究其原因与其机械结构复杂、研制成本较高有关,由于参与实际救援的经验较少而无法提出真正有效的改进。提出一种改进的前置摆臂履带救援机器人,结构紧凑简单,其运动特性良好能够完成各类地形的攀越并且极大的降低了成本。
2 机器人结构
传统履带式救援机器人有固定双履带、四履带两摆臂、六履带四摆臂、履带可变节等形式,摆臂的加入提高了越障能力,并且数量越多,越障能力越强。然而其摆臂轴与车体轮轴处于重合位置,这使得传动结构复杂同时增加了车体的宽度,需要高精度大扭矩的多个电机实现机器人的整体运动。摆臂同轴设计是为在机器人意外翻转后实现复位,一些借助摆臂全周运动的步态缺乏稳定性,通过理论验证的步态在实际样机运动时效果并不理想。现对摆臂位置进行调整,使其位于主履带的前方并保证摆臂履带与主履带宽度一致,相较之前同尺寸的设计,减小宽度的同时增加了长度,使得整体质心的位置前移,在跨越凸台、沟壑等典型障碍物时具有更好的运动能力,同时避免摆臂轮与履带轮同轴的复杂机械结构,使得救援机器人整体更加紧凑稳定,其SolidWorks模型,如图1所示。

图1 救援机器人模型Fig.1 The Model of Rescue Robot
摆臂前置式履带救援机器人主要由车体、两侧主驱动系统、前两侧摆臂系统构成,车体内包含控制系统、信息采集系统、锂电池、电机等部件,主驱动系统包含主驱动轮、从动轮、承重轮、主履带,摆臂系统包含摆臂驱动轮、摆臂小轮、摆臂杆、摆臂履带。主驱动系统和摆臂系统的部件通过侧板连接,主驱动系统通过侧板固定于车体两侧,电机经由涡轮蜗杆减速器与主驱动轮、摆臂驱动轮连接。
3 越障机理分析
3.1 跨越凸台
事故类型不同其现场环境、障碍物类型也不同,结合Rescue Robot大赛中常见的障碍物将事故现场的非结构地形归结为楼梯、凸台、上下坡、沟壑等结构地形来进行测试。救援机器人具有左右对称的特点,可视为刚体进行分析,从侧面看具有串连机器人多连杆机构的特点,故采用D-H方法为机器人建立坐标系,确定参数即可获得齐次变换方程。主车轮轴心距L1=350mm,L2=150mm,摆臂轮轴心距L3=210mm,大轮R=60mm,小轮r=35mm,摆臂履带接地有效长度D=200mm。以爬越凸台的位姿建立模型,如图2所示。以主驱动轮与地面的接触点为原点建立O0-X0Y0Z0,以主驱动轮轴心为原点建立O1-X1Y1Z1,以摆臂轮轴心为原点建立O2-X2Y2Z2,由于各坐标系在Z轴无偏移,故考虑XY平面的变换参数。主车体相对水平位置的转角为α1,摆臂相对于车身的转角为α2-90°(以O2为原心,逆时针方向为正),车体质心W1距主驱动轮轴心为d1,摆臂质心W2距摆臂驱动轮轴心为d2,车身质量m1,摆臂质量m2。

图2 D-H坐标系模型Fig.2 The Model of D-H Coordinate System
W1在坐标系 1中是1G1=[d10 0 1]T,W2在坐标系 2中是2G2=[d20 0 1]T,由建立的坐标系和关节参数可得质心方程如下:


0G总(1,1),0G总(2,1)为整体质心在基坐标系{0}下的 XY 坐标。救援机器人跨越凸台有2个关键条件:(1)质心纵坐标大于凸台边缘的高度。(2)质心横坐标同时须大于凸台边缘线在{0}中的横坐标。上式中的 m,d,L,R 均测量已知:m1=16.7kg,m2=3.2kg,d1=293mm,d2=69mm,在SolidWorks中对α2进行干涉检查,得摆臂与主履带干涉的极限角度为(-110°,+115°),由此建立质心 Gx、越障高度H与车体仰角α1和摆臂角α2间的关系式:

经MATLAB仿真计算得Hmax=234.58mm,此时α1=57°,α2=33°,如图3(左)所示。对于d1,其值受锂电池安装位置、承重轮材质、车体材质影响会改变,而d2不受这些影响其值不变。不同d1值对越障高度的影响,d1越大质心越靠前,越障高度也越大。用Xd=(H-R)/tanα1+R表示在{0}下当GY≥H时凸台边缘距原点O0的水平距离,当GX≥Xd,才满足第二个条件。GX与Xd在X轴方向位图,其值均随着车体仰角增大而减小,彩色亮图为GX,黑色暗图为Xd。如图3(右)所示俯视图,当GX≥Xd为图中偏亮区域时满足条件2,此域内找到的Hmax比全域内的Hmax小,但可同时保障机器人质心在水平和竖直方向均越过台阶边缘线。

图3 MATLAB越障分析图Fig.3 MATLAB Diagram of Obstacle Crossing Analysis
3.2 其他地形越障分析
机器人转向是借助两侧主履带实现差速转向。当两侧速度完全相反,以自身为圆心原地转向;当两侧速度不同,以较小侧为内侧,一定曲率进行弧线的转向运动。对于沟壑地形,需考虑其宽度和深度,当跨度大于机器人可跨越的宽度时,考虑其深度是否符合2.1中上下凸台的高度,若符合,则可通过上下凸台实现沟壑跨越。当跨度小于可跨越宽度时,前摆臂履带水平接地使机器人整体长度最长时有利于跨越沟壑。假设机器人总质心G总距主驱动轮距离为d,有效接地总长为L,需保证质心在沟壑间移动时,其前端与后端均与地面接触,即可跨越沟壑宽度

机器人爬坡和履带与地面的摩擦系数有关,所示设重力为G,摩擦系数为μ,斜面倾角为β,故:

机器人爬楼梯需以一固定姿态连续爬越,摆臂履带前端与主履带后端间需与3个台阶边缘线接触才能稳定爬越,实测台阶高度为h=160mm,台阶面宽度为b=280mm,结合人体工程力学一般楼梯不会将h设计太高,一般不超过200mm,而b则根据不同场所其值会有所增大。机器人有效接地总长为L,以实测楼梯数据为准:

4 ADAMS仿真
在ADAMS中建立救援机器人模型,对车体进行简化但仍保留轮系、车体、摆臂杆等部件,同时建立各类结构化地形,通过STEP函数与虚拟Sensor实现机器人的各种步态。在ADAMS和MATLAB中同时建立救援机器人的实体模型和数学模型,把α1,α2在MATLAB中的模型精确到1°,通过仿真取得不同时刻角度的曲线与MATLAB中的Gx,H,Xd数据集对应,可以取得越障前后的车体与摆臂转角的大小与变化范围,其流程,如图4所示。
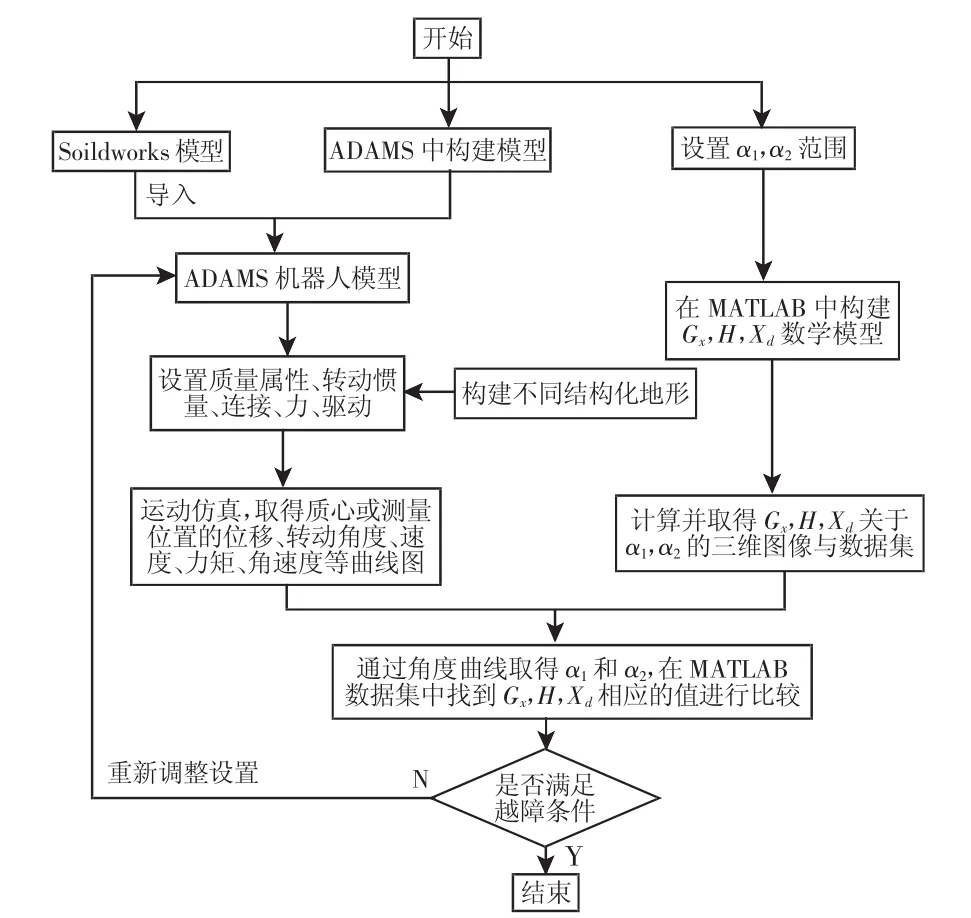
图4 联合分析流程图Fig.4 Combination Analysis Flow Chart

图5 质心XYZ方向位移Fig.5 The Centroid Displacement Along XYZ
建立210mm高的凸台,为验证2(1)中对于越障机理的讨论,设置仿真时间为10.5s,仿真步数为500,通过ADAMS获得机器人质心在三维坐标轴的位移轨迹,如图5所示。质心在X方向遇到障碍物后,位移增量减少,当10s过后爬上凸台位移开始快速增加;质心在Y方向当越障时其值开始增大,在越障过程中先增大后减小至稳定值,增加的过程伴随X方向值得增加,说明其Gx始终大于Xd;质心在Z方向始终稳定在固定值,说明在机器人前进和越障过程中没有发生左右偏移,机器人运动较稳定。对于其他地形也可进行类似分析,取得质心在XYZ方向的位移、速度、力矩曲线验证不同地形下的越障机理。
5 结论
(1)典型的越障新机构如行星轮式爬梯机构、六轮多足式机构、四或六弧形轮腿式机构均含有一定越障局限性。履带式机器人与地面有较大接触面积,移动稳定性较好,由于其履带的可变形而具有较强的越障能力,前置摆臂结构简化传统摆臂式机器人复杂机械结构,对楼梯、凸台、沟壑等地形时在相近尺寸下具有较强的通过性。同时也为柔性连接的履带式机器人研究提供有力基础[9]。(2)对于越障机理的研究经过了基于质心位置推导公式、D-H坐标法建立越障高度模型,相关文献仅考虑竖直方向的越障条件,并未考虑质心水平方向的移动条件。在越障机理的研究中对质心X,Y方向的条件同时进行判断,并基于客观条件对模型进行了修正,借助MATLAB对数学模型进行分析,借助ADAMS仿真对实体模型的运动性能进行测试。(3)随着分布式群体机器人概念的提出[10],救援机器人只有不断简化结构、提高稳定性才能在群体协作救援方面取得进步。前置摆臂式履带机器人机构的提出极大降低群体机器人实验研究、救援操作平台系统设计、救援行动参与的成本,具有较强的实际意义。
