空间运动目标实时引导数据解算探讨
2018-07-16胡豪柳建光马留洋
胡豪 柳建光 马留洋
摘 要 空间运动目标跟踪技术在空中飞行器侦察、情报获取、空中拦截等领域应用广泛,根据相关侦察系统获得高空目标的经纬度坐标、姿态等信息,利用旋转矩阵计算出空间目标在地面固定平台坐标系的坐标值,并实时解算出空间目标相对地面固定平台的方位、俯仰角和斜距作为引导数据,引导地面跟踪器对被测目标进行实时跟踪。文章介绍了空间目标坐标系的转换和目标引导数据计算过程,建立自主引导测量方程,将得到的实时引导数据在跟踪平台上进行了模拟跟踪验证,均能很好地实现对空间运动目标的捕获、跟踪。
关键词 目标引导;旋转矩阵;方位角;俯仰角;距离
中图分类号 TP3 文献标识码 A 文章编号 1674-6708(2018)213-0093-05
1 概述
针对空间运动目标跟踪技术,传统的目标跟踪平台只能捕获跟踪目标,不具备实时计算目标具体位置的能力,因此在如何获取目标位置和提高目标位置计算精度研究方面仍需进行深入研究。
伴随空间运动目标跟踪技术的发展,其应用领域日益广泛。依据空间目标的经纬度高度信息,完成对其的高精位置解算和跟踪,相关跟踪平台根据解算后的引导数据,实时快速调整平台方位,搜索并锁定空间目标,并使其保持在视场中心[1]。目前的跟踪技术逐步引入了空间定位、扫描等要素,有针对性的建立了引导模型,同时对高精度引导提出了更高的要求。
空间运动目标实时引导数据的解算问题可以描述为:将己知的空间目标的经纬度高度信息、地面跟踪平台的经纬度高度等信息分别转化为坐标位置信息,根据坐标旋转矩阵求解空间运动目标相对于跟踪平台的球坐标,引导跟踪平台实现对目标的高精跟踪[2]。本文阐述了目标位置与跟踪平台位置坐标的转化,利用旋转矩阵计算目标引导数据,通过在现有跟踪平台的试验和误差分析,验证本文引导数据解算的正确性。
2 跟踪系统目标引导过程
空间运动目标实时引导过程是根据目标的大地坐标,求解目标相对于跟踪平台的坐标位置的过程,如图1所示。
具体计算过程如下所示[1-4]:
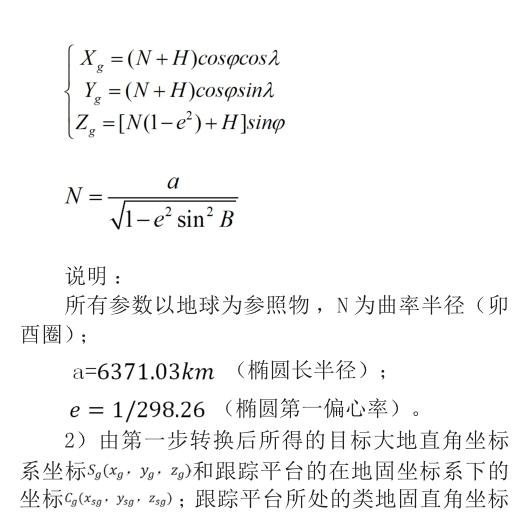
1)数据中心接收来自相关侦察系统(或机载GPS定位系统)获取的空间运动目标在大地坐标系中的地理位置(B,L,H)(纬度,经度,高度)信息并传输给控制中心。
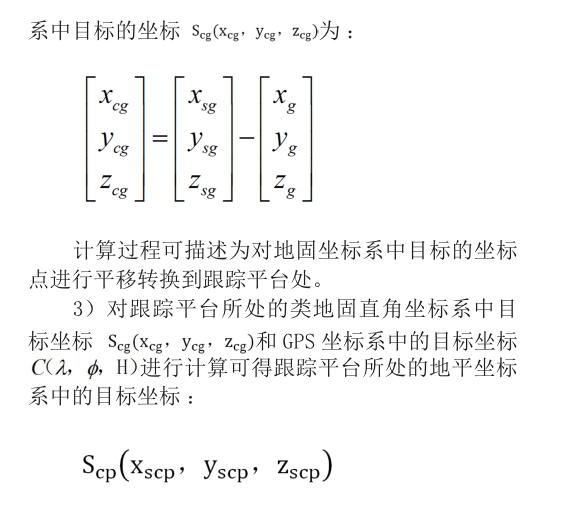
2)控制中心对接收到的数据首先通过坐标转化将目标点从大地坐标系(地理位置坐标系或GPS坐标系)转换到大地直角坐标系(Xg,Yg,Zg)。然后经由转换矩阵进行坐标转换至跟踪平台所在的直角坐标系(Xa,Ya,Za)。
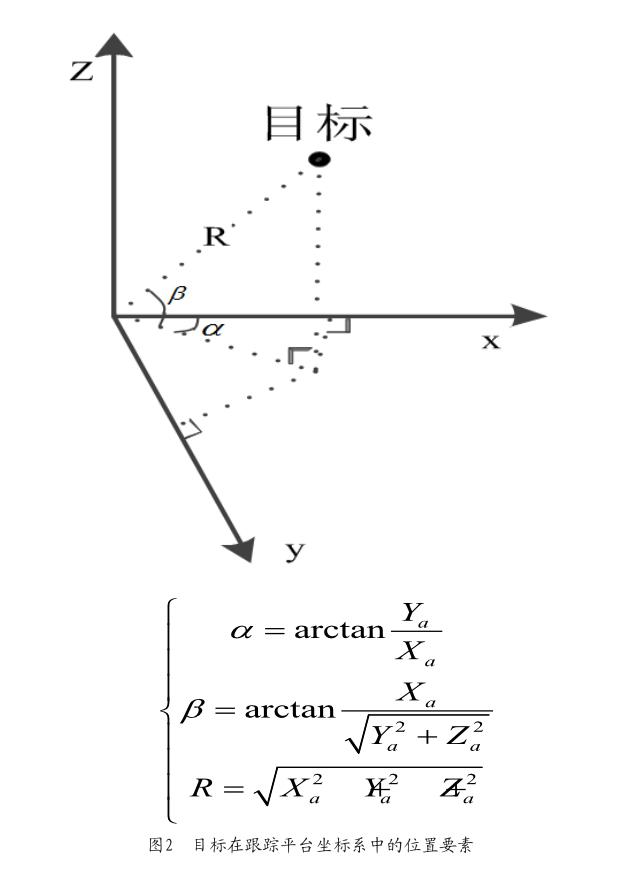
3)利用直角坐标系坐标计算目标点在跟踪平台坐标系的方位角α、俯仰角β和斜距R如图2所示。
4)跟踪系统根据计算得到的引导数据(方位、俯仰和斜距信息)调整执行机构,实现目标的捕获跟踪。
2.1 坐标系定义及坐标转换
由于跟踪系统、GPS定位和空间运动目标通过测量得到的姿态数据分别处于各自的坐标系,无法进行相关计算,所以计算之前必须进行对应的坐标转换。转换前需要对各个坐标系进行定义,约定不同坐标系下角度的度量方式[2,5-7]。
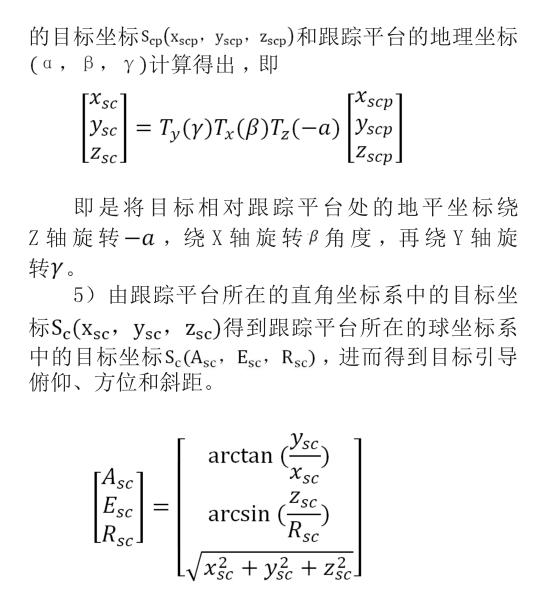
1)地球固定坐标系(简称地固坐标系或大地直角坐标系)。如图3所示。该坐标系坐标原点位于地球椭圆的中点O,赤道面为XOY面,其中,X轴指向起始子午线与赤道的交叉点,Y轴与X轴符合右手坐标系,指向与X轴成90°夹角的经线,Z轴指向地球椭圆的北极。
2)跟踪平台所处的类地固直角坐标系。坐标系原点与平台质心重合,X、Y、Z轴分别与地固坐标系相应坐标轴同向且平行。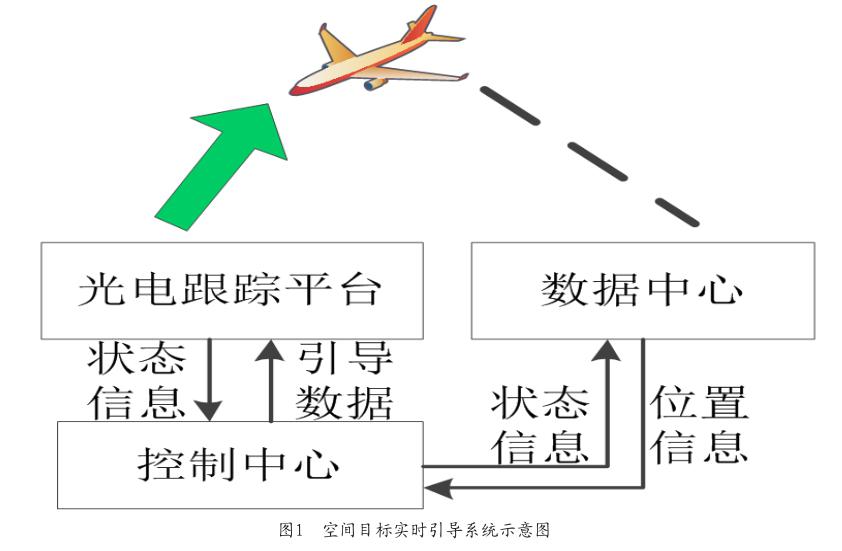
3)跟踪平台处的地平直角坐标系。原点在平台质心,基本面为平台所在的点的地球同心球的切面,正东为X 轴指向,正北为Y 轴指向,Z轴指向平台处地面向上。
4)跟踪平台所处的球坐标系。通过方位、俯仰和斜距来确定目标位置。方位为X轴正向逆时针旋转,从0°到360°;俯仰以平台基本面为基准,上正下负,变化区间为-90°到90°;斜距为跟踪平台距目标的距离。
5)GPS坐标系(又称地理坐标系)。通过经度、纬度和海拔确定目标位置。
6)空间运动目标姿态。主要含航向角、横滚角、俯仰角。通常定义正方向为正北,前进方向与正北方向的夹角叫航向角,正北为0°,由正北方向顺时针旋转从0°到360°递增;目标纵轴线所处的竖平面同其对称面的夹角叫横滚角,变化区间为-180°到180°,对称面居右值为正,反之为负;目标所在的地平面与前进方向的夹角即俯仰角,0°平面为地平面,向上为正,向下为负,取值范围为-90°到90°。
2.2 旋转矩阵T的定义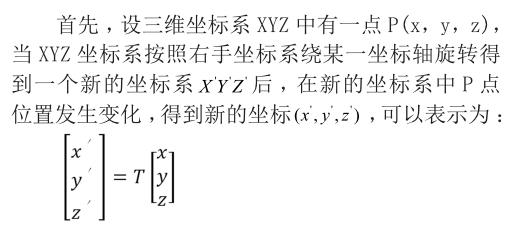
其中,在進行坐标转换时,绕不同坐标旋转所求的旋转矩阵不同,根据上述内容可知旋转矩阵T有3种不同形式[7],如下所述。
1)绕X轴旋转角时,坐标系转换矩阵为:

在进行空间运动目标跟踪时,地面跟踪平台根据指控中心实时解算的目标引导数据,驱动跟踪平台对目标进行持续精确跟踪。
3 解算程序
根据上述计算过程本文利用C#语言实现引导数据解算过程,通过WinForm窗体程序设计实现可视化人机交互界面,如图4所示,根据跟踪平台的位置信息和目标的位置信息,即可直接解算引导数据。
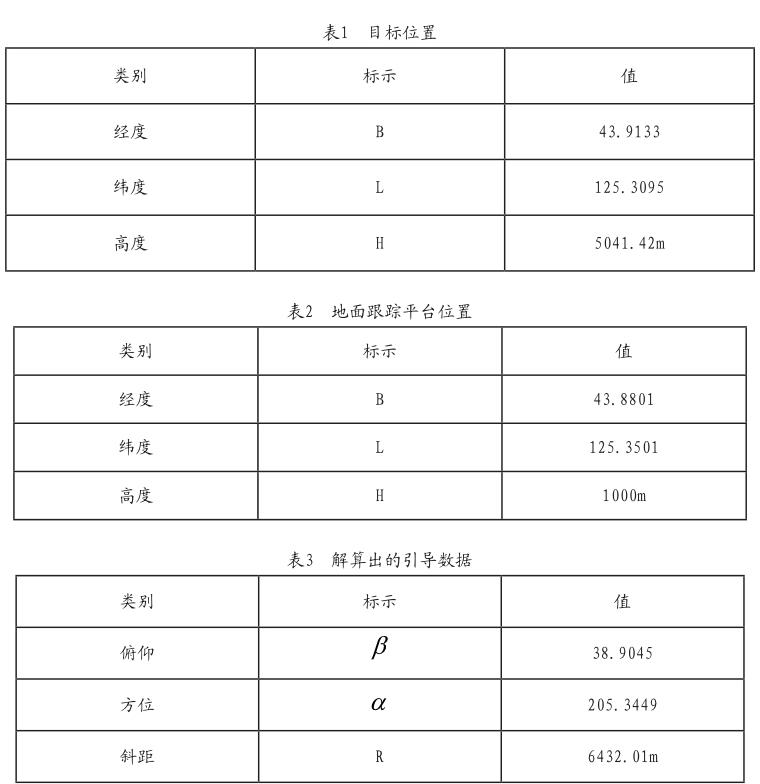
为验证上述解算过程及设计目标引导数据解算程序的有效性和正确性,本文给出一组目标位置的经纬度和高度信息以及地面跟踪平台的位置信息如表1和表2所示,解算出的引导数据结果如表3所示。本文将得到的引导数据结果通过局域网发送给目标跟踪系统,可准确捕捉到目标,并进行实时跟踪。
根据跟踪系统实时跟踪效果,可以验证本文解算过程的正确性,同时验证了本文设计的可视化引导数据计算软件的有效性,使整个计算过程简单清晰,便于验证。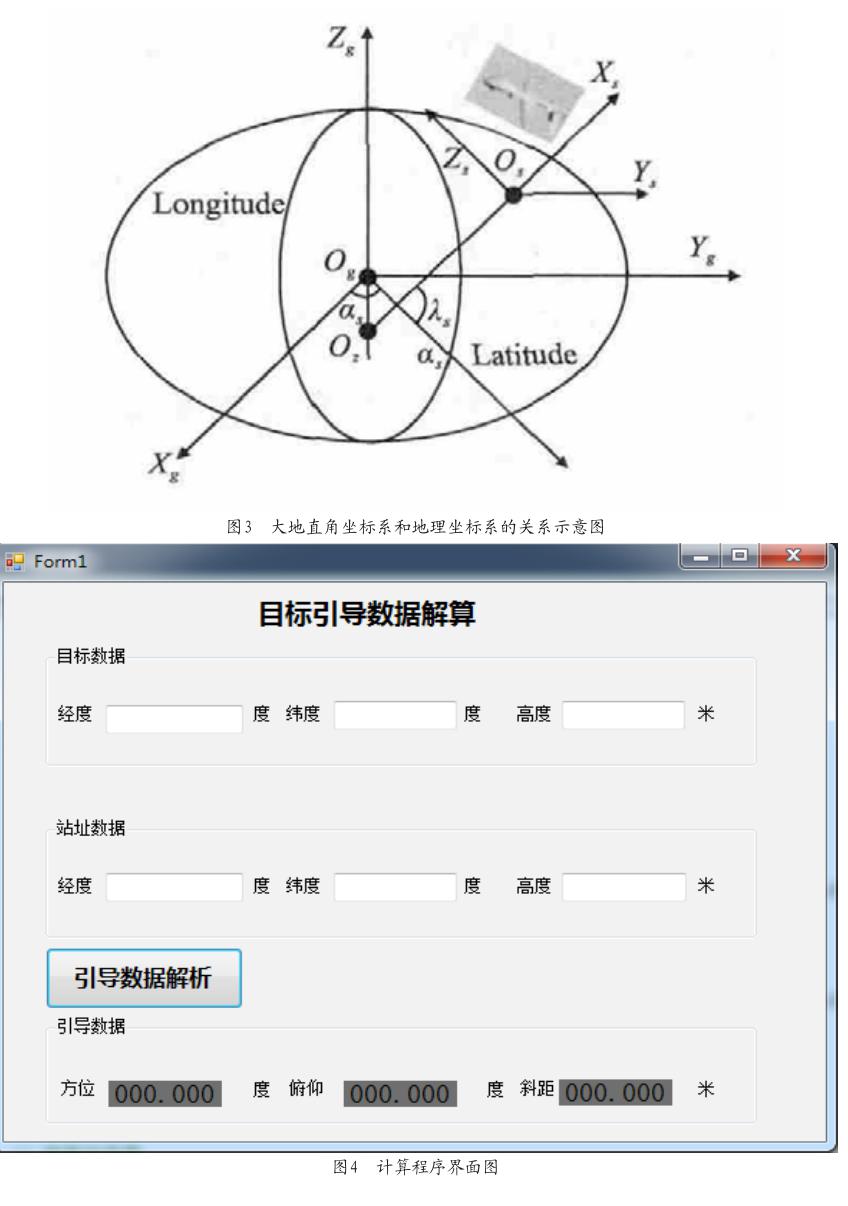
4 结论
本文阐述的空间运动目标实时引导解算模型是通过坐标转换建立的,在此基础上利用C#对解算过程进行了实现,并设计了一个用于目标引导数据解算的可视化程序,通过在现有跟踪平台下进行试验,验证了本文设计解算过程的正确性和有效性。借助本文设计解算过程可以实现地面跟踪系统对空间运动目标的精准跟踪,为目标跟踪提供参考。
参考文献
[1]王家骐,金光,颜昌翔.机载光电跟踪测量设备的目标定位误差分析[J].光学精密工程,2005,13(2):105-116.
[2]张葆,姚俊峰,高利民.机载GPS测量定位技术研究[J].光学精密工程,2009,17(1):172-178.
[3]祁立学,张萍,杨玲.地心直角坐标到大地坐标常用转换算法的分析与比较[J].战术导弹技术,2006(2):37-41.
[4]崔永俊.空间直角坐标与大地坐标之间的变换方法研究[J].中北大学学报(自然科学版),2003,24(1):73-75.
[5]彭曉刚,冯欣,青平.光电设备试验中目标跟踪引导的航迹拟合推算[J].计算机与数字工程,2017,45(6):1067-1070.
[6]董云飞,谢红松,罗斌,等.基于达芬奇平台的运动目标跟踪算法[J].计算机与现代化,2015(10):45-49.
[7]田俊林,潘旭东,游安清.运动平台目标引导数据解算及误差分析[J].强激光与粒子束,2014,26(8):91-95.