全旋转闭环指向式导向钻井工具控制系统*
2018-07-11高嗣土
高 雪,乔 阳,田 帆,高嗣土
(西安石油大学,陕西 西安 710065)
0 引 言
随着社会的全面快速发展,人类对能源的需求量在持续增加,其中,石油已经成为全球各个国家在提高其综合实力过程中不可或缺的战略性资源。但是,世界上大部分油田已经陆续进入到了开采后期,油藏开采的难度在不断增加,于是,开采过程中遇到的地质情况也变得日益复杂[1]。
传统的定向钻井技术以及滑动导向钻井技术,由于在钻井过程中存在着非常多的局限性,已经不能适合难度大、地质环境复杂的井眼钻采使用。于是必须采用一种全新的闭环钻井技术,其既要满足能够较好地控制井眼轨迹,又能够满足让钻柱在井下工作过程中,尽可能减小所受摩擦阻力的要求,最重要的是可以尽快地解决复杂地层环境的影响[2]。
笔者在总结国际先进旋转导向钻井技术并基于动态指向式导向钻井工具原理样机的基础上,分析了全旋转闭环指向式导向钻井工具的控制系统。旋转导向钻井系统主要由地面闭环控制系统、井下闭环控制系统及双向通讯系统等部分组成。其中,全旋转闭环指向式导向钻井工具执行机构的控制系统主要由工控机、井下微处理器、姿态测量系统、井下双向通讯系统四部分组成。导向偏置机构有由2个内外偏心环构成,通过控制电机的转角来实现两个内外偏心环的转动,从而达到驱动偏置机构实现导向轴预定偏置的目的。
1 旋转导向钻井系统构成及工作原理
旋转导向钻井系统主要由地面闭环控制系统、井下闭环控制系统及双向通讯系统等部分组成。其系统示意图如图1所示。

图1 旋转导向钻井系统示意图
地面闭环控制系统实时监测旋转导向钻井工具在井下的工作状况,并将钻井相关重要参数可视化地显示出来,当实际井眼轨迹偏离目标轨迹,现场工程技术人员通过双向通讯系统向旋转导向系统发送控制指令,使其按目标井眼轨迹钻进,地面监控系统使得石油工程师们更加直观的掌握钻井工具的空间姿态。
井下闭环控制系统由随钻测量系统和旋转导向工具执行机构控制系统两部分组成。随钻测量系统(MWD)主要用于测量井眼轨迹几何参数和地质参数,如井斜角、方位角、工具面角、自然伽马、电阻率等。旋转导向工具执行机构控制系统主要负责钻具钻进方向的调节[3]。执行机构控制系统的核心是稳定平台,它集各种传感器、数据采集及信号处理、功率控制、电磁转矩控制、机械学及摩擦学等多项技术于一身,是以自动控制技术为主体,多个学科相互交叉的产物。稳定平台的控制性能指标决定了导向钻井工具的导向能力和导向精度。
双向通讯系统由地面—井下双向通讯系统和井下双向通讯系统两部分组成。负责上传井下实时测量信息及下传地面工控机控制指令的任务。
地面闭环控制系统和井下闭环控制系统的紧密配合,是全旋转闭环指向式导向钻井工具实现导向轴井斜角和工具面角实时连续调节的强有力的保障。
2 全旋转闭环指向式导向钻井工具
2.1 机械结构
全旋转闭环指向式导向钻井工具的机械结构如图2所示。其机械结构主要包括旋转外套、电子仓、滑环、偏置机构、导向轴、扭矩传递机构及密封装置等部分,其中偏置机构包括内偏心环和外偏心环两部分,套接在球座上的内偏心环安装在外偏心环内部,分别由两个伺服电机驱动。无框电机1的定子与旋转外套内部固连,转子与外偏心环外部固连。无框电机2的定子与外偏心环内部固连,转子与内偏心环外部固连。这样,两个无框电机可以分别直接驱动两个内、外偏心环,从而实现导向轴精准偏置。
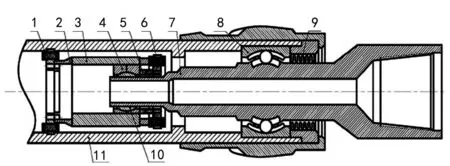
图2 全旋转闭环指向式导向钻井工具的机械结构示意图1.外偏心环驱动电机 2.外偏心环连接法兰 3.外偏心环 4.内偏心环 5.内偏心环连接法兰 6.内偏心环驱动电机 7.导向轴 8.导向节 9.密封结构 10.支撑轴承 11.旋转外套
导向轴的左端插入球座中,使两者配合形成一个圆柱副,球座和偏心环形成一个球绞副,这样的设计使导向轴在摆动的过程中不会被卡死。导向轴右端连接扭矩传递机构(万向节),扭矩传递机构右端使用波纹管实现密封,在导向轴最右端设有锥螺纹便于安装钻头。在导向轴左端设有稳定平台电子仓部分,用于安装姿态角度测量系统及供电电路系统。稳定平台的控制性能指标在导向钻井工具的导向能力和导向精度上起着至关重要的作用。
2.2 偏置机构工作原理
为了便于理解该指向式导向钻井工具的导向原理,可以将图2简化为图3。其主要由导向轴、偏置机构、扭矩传递机构、钻头、旋转外套等组成。偏置机构由内偏心环和外偏心环两部分构成。导向轴以扭矩传递机构,即万向节为支点,安装在旋转外套内,导向轴可绕该支点做摇摆运动。当偏置机构在给定方位上向导向轴施加作用力的时,由杠杆原理可得,将会使钻头朝与施力方向相反的方向摆动,从而实现导向钻井工具定向调节的目的。
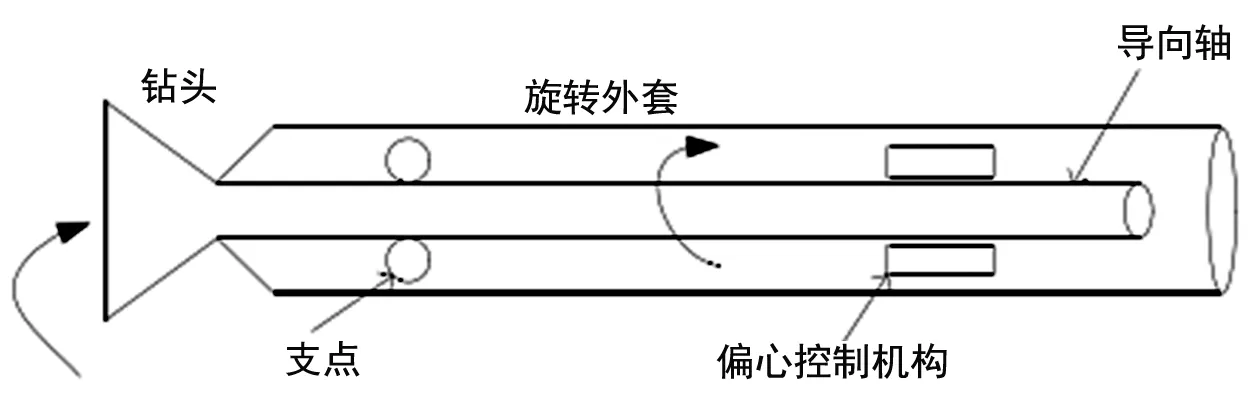
图3 指向式导向钻井工具机构简图
电机控制器根据井下微处理控制器所接收的控制指令来控制伺服驱动器来驱动相应的无框电机工作。其中,无框电机1控制外偏心环转动,无框电机2控制内偏心环转动,当某个电机没有输出时,相对应的偏心环便不会转动。偏置机构作用的大小和方向由两个偏心环的合偏心位移来决定,从而以导向轴摆动的角位移来改变钻头实时钻进的方向,直到钻头沿预设的轨迹钻进,最终形成预期轨迹,实现导向钻进目的。
扭矩传递机构即万向节,是导向轴的转动支点。钻柱带动旋转外套旋转,旋转外套通过扭矩传递机构将扭矩和钻压传递到导向轴上,使导向轴带动钻头对岩层进行钻削。姿态测量系统对导向轴的各个参数进行实时测量并传输给双向通讯系统,双向通讯系统将这些参数整合上传给井下微处理控制器和地面控制系统,地面控制系统做出相应的指令,再通过地面—井下双向通讯系统将指令下传给微处理器,微处理器根据指令做出相应的调整来控制电机,从而形成一系列的闭环反馈控制。
3 全旋转闭环指向式导向钻井工具执行机构控制系统
全旋转闭环指向式导向钻井工具执行机构的控制系统主要由工控机、井下微处理器、姿态测量系统、井下双向通讯系统组成。其示意图如图4所示。
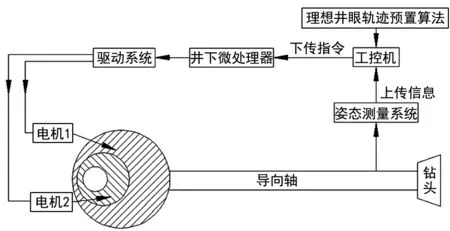
图4 钻井工具执行机构控制系统示意图
作为执行机构控制系统的上位机,工控机主要负责监视钻井工具工作状态和下达控制指令的功能[4]。其内部存有理想井眼轨迹信息和井眼轨迹处理算法,并配有数据采集、数据处理和运动控制的相关软件以及相应的通信接口[5]。钻具在导向钻进时,工控机根据理想井眼轨迹信息和井眼轨迹处理算法产生相应的导向轴偏置控制指令,并将控制指令通过地面—井下双向通信系统下传至导向执行机构内部的井下微处理控制器,井下微处理控制器通过驱动器驱动偏置机构内部的直流伺服电机转动,从而带动内外偏心环的转动,进而实现导向轴的径向偏置;同时,工控机接收由通讯系统上传的传感器实测井眼轨迹数据,并将其与预设井眼轨迹数据比较,得出轨迹偏差,然后根据预设控制算法产生纠正井眼轨迹的控制指令,并通过地面—井下双向通信系统下发至井下微处理控制器,从而驱动导向轴偏置。
井下微处理控制器由多轴运动控制卡和相应的运动控制软件组成,其接收工控机发送的导向轴偏置控制指令[6],并根据预设的运动控制软件程序将控制指令转换成脉冲指令,从而控制偏置机构内两个直流伺服电机的转角,并使两个直流伺服电机分别按所需的转角转动,以此达到驱动偏置机构实现导向轴预定偏置的目的。
姿态测量系统在钻井工具导向控制调节中起着不可或缺的作用。在导向钻井过程中,导向控制所需要的井下工具姿态参数主要有工具的旋转速度、工具倾角、工具方位角等。这些参数的准确性、实时性是导向钻井工具实现导向控制的前提条件,也是井下控制系统进行反馈调节、确保实现所期望的井眼轨迹的关键。
测量系统由微位移传感器、角度传感器及位置和加速度传感器等组成。其中,微位移传感器用于测量导向轴偏置幅值,角度传感器用于测量导向轴偏置相位,位置和加速度传感器用于测量导向执行机构实时姿态信息。测量系统负责将导向轴和导向执行机构的偏置及姿态信息等物理量信息转换成模拟量信息,并上传至双向通信系统。导向轴及导向执行机构测量系统安装在稳定平台电子仓中,其模拟安装图如图5所示。
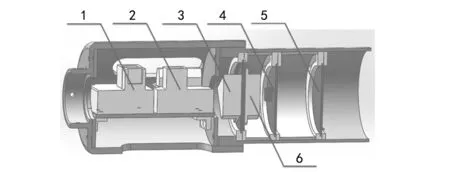
图5 稳定平台电子仓姿态测量系统安装图 1.电机驱动器1 2.电机驱动器2 3.速率陀螺仪 4.供电电路 5.姿态采集电路 6.三轴重力加速度计
该指向式导向钻井工具导向轴的姿态测量系统和无线发送硬件电路部分的供电电源,由可充电电池提供,而不是由钻井工具提供,这样可以把姿态参数测量系统和导向钻井工具的其他部分分离开来。在该钻具的地面模拟测试实验中可以相对独立,以便更有效地验证所设计姿态测量系统的可行性。
井下双向通讯系统由多通道、高速、同步数据采集卡和相应的数据采集软件组成,负责将传感器模块采集的实钻井眼轨迹信息和井下钻具状态信息等模拟信号转换成相应的数字信号,并上传至工控机。
4 结 论
(1) 介绍了全旋转闭环指向式导向钻井工具机械结构及工作原理。其机械结构精巧简单、工作原理清晰易懂。双偏心环偏置机构能快速实现导向轴方位角和工具面角等的连续调节和响应。
(2) 总结了旋转导向钻井系统的主要组成及全旋转闭环指向式导向钻井工具执行机构控制系统的构成和控制原理。主要介绍各部件的工作原理、作用和相互之间的连接。各部件之间的紧密配合是实现导向轴精确偏置和迅速调节的关键。
