特种设备和危化品储存容器无人机巡检方法研究
2018-07-11杨景标
郭 晋 杨景标
(广东省特种设备检测研究院 广州 510655)
特种设备和危化品储存容器广泛应用于我国重要的国民经济支柱产业,对人身和财产安全有较大的潜在危险性。大型塔器、乙烯球罐和原油储罐、有毒介质储罐等特种设备和危化品储存容器,如发生泄漏、火灾甚至爆炸事故,可能造成人员伤亡、重大的经济损失或严重的环境污染,其后果将严重影响社会安定。
为了使特种设备和危化品储存容器处于正常使用状态,使用单位一般会进行经常性的巡检和自行检查;设备到了检验周期时,检验机构还会对设备的安全状况进行符合性验证性质的定期检验[1]。无论是巡检、自行检查,还是定期检验,都有宏观检查或宏观检验项目,且主要是通过人工目视检查来完成。对于大型的特种设备和危化品储存容器,一般通过扶梯或脚手架对人工可达部位进行目视检查。人工攀爬不仅费时耗力,工作效率低,劳动强度大,而且由于通过扶梯或脚手架难以覆盖设备的所有部位,存在一些死角,因此很难全面发现潜在的安全隐患,致使一些本应发现的事故隐患未能及时发现。
而在巡检管理方面,限于技术原因,目前普遍采用“翻牌”的方式。如石化厂沿用的挂牌巡检模式,即操作人员按照一定的路线,将第一站的牌子摘下挂在第二站上,第二站的挂在第三站上,依次类推直到巡检结束。也有的采用较为先进的电子巡检模式,但都需要人工参与,不可避免地存在作业死角。
目前已有将无人飞行器应用于公共安全、救灾、农业、交通等领域的研究报道[2-6]。无人飞行器巡检相比人工徒步巡检具有效率高、操作简单、使用成本低、检测范围广、无死角等优点,基于无人飞行器的巡检技术较多地应用于电力巡检[7-11]。
多旋翼无人飞行器通过搭载全方位高清摄像头及视频信号无线回传系统,可通过自身携带的摄像机将拍摄的视频实时传输到地面控制平台[12-14]。由于无人飞行器机身轻巧便于携带,操作轻便,可全方位、近距离拍摄受检对象,巡检作业无死角,无盲区。巡检过程若发现问题,无人飞行器可悬停拍摄,工作人员可以对疑似问题的严重程度进行判断并拟定处理措施,免除了人工攀爬、检查等作业困难,大大降低了人工巡检作业的危险系数和劳动强度。
鉴于无人机巡检技术的优势,本研究的主要目的是探索将无人飞行器应用于特种设备和危化品储存容器巡检的可行性和适用性。
1 无人机巡检的飞行作业流程
为了使特种设备和危化品储存容器无人机巡检能达到检验效果,确保作业顺利进行,同时保护无人机不受损,需要制订一套可以指导具体巡检作业的工作流程。本研究采用的是笔者已搭建的无人机巡检系统,该系统主要包括多旋翼无人飞行器、飞控系统(遥控器)、检测系统和数据无线传输系统等四个部分[15]。
基于多旋翼无人飞行器的特种设备和危化品储存容器巡检飞行作业流程的主要步骤简述如下:
1)巡检作业前,观察受检对象周围较高建筑物,确认无人飞行器返航高度。根据周围房屋建筑、树木、山包的高度适当调整返航高度,防止飞行器飞到建筑物或者山包后面时,飞行器与遥控器信号被阻挡丢失信号后,飞行器会按设置好的返航高度直线飞回起飞点。
2)根据预先设计好的方案和路线进行飞行、拍摄和检验等作业。通过无线传输设备,将巡检拍摄结果传送至遥控器,通过连接遥控器的显示设备可以观察相关拍摄结果。
3)根据无人机拍摄结果,对设备的整体情况进行判断。
2 巡检作业方案
巡检方案主要是制订将无人机应用于特种设备和危化品储存容器宏观检查拍摄时的路线和内容,实现对设备的宏观检查或检验。无人机巡检路线主要是针对高耸立式和沿水平方向布置的特种设备和危化品储存容器来进行设定。
对储存无色无味危化品流体介质的容器是否发生泄漏,可借助飞行器装载红外相机来拍摄检查。此外,装载红外相机的飞行器还可以实现夜间巡检。
对设备的无人机巡检方式可细分快速巡检和精细巡检两种。快速巡检是对设备系统总体运行状况进行快速检查,主要检查设备是否完好,从宏观角度判断设备的安全状况。精细巡检是利用无人飞行器悬停功能对设备存在缺陷或异常的部位进行精细拍摄检查。
根据无人飞行器巡检的拍摄结果,对设备的安全状况进行初步的判断,对是否需要采取进一步措施提供直观的实时依据。
2.1 立式特种设备巡检
对设备巡检的主要内容包括:1)设备系统的总体运行状况;2)设备、管道及其安全附件的“跑、冒、滴、漏”情况;3)现场安全防护、消防等设施的状况;4)关键设备和重点部位的安全状况。
对于立式设备如高耸塔器,巡检的飞行路线如图1所示,通过控制飞行器从设备两侧缓慢爬升,上升到预定的高度后环绕塔器中轴线进行环绕模式飞行,同时对塔器的外表面进行拍摄,进行快速巡检作业;如发现有问题,控制飞行器处于悬停状态对有问题部位进行仔细拍摄,开展精细巡检作业。
对于普通规模的设备,一般可通过人工进行外部宏观检验,如需使用飞行器进行检查时,可以控制飞行器爬升到预定高度,然后围绕设备中轴线在一个半径范围进行拍摄检查,如发现问题,将无人飞行器悬停后进行仔细拍摄。
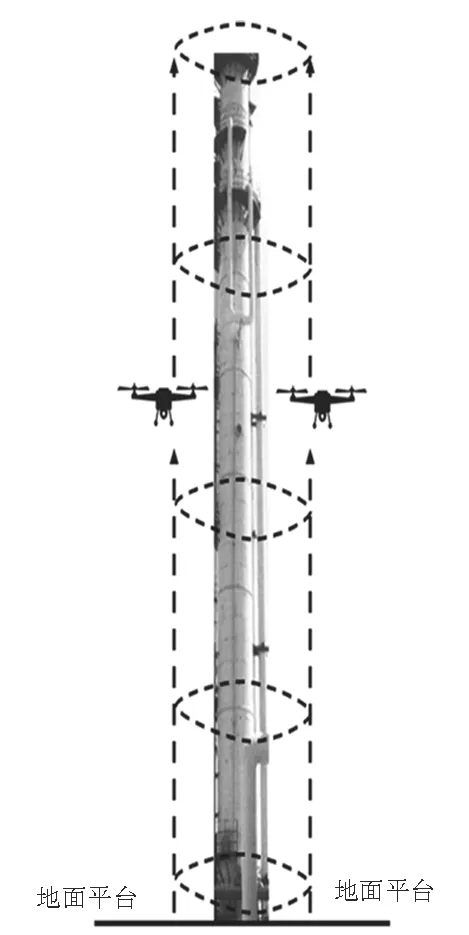
图1 塔器的无人机巡检路线示意图
2.2 水平布置特种设备巡检
沿水平敷设压力管道是一种典型的水平设置的特种设备,其巡检的内容主要包括:1)管廊架上一切管线的总体运行情况;2)管线有无“跑、冒、滴、漏”、锈蚀、损坏等现象;3)管廊架自身钢结构是否完好无锈蚀、平台护栏是否完好无缺损及周边有无危害到管廊安全运行的情况;4)管廊周围是否有对管线有安全隐患的施工活动等。
对于沿水平方向的管道,可以通过来回地飞行路线进行巡检,巡检路线如图2所示。飞行器在飞行过程中进行拍摄,进入快速巡检作业状态;如发现有问题,控制飞行器处于悬停状态对有问题部位进行仔细拍摄,开展精细巡检作业。
2.3 利用红外相机的巡检
上述两种飞行路线的巡检方案,主要是实现可见光的宏观检查或检验。而对于无色无味流体介质的泄漏、保温层破损导致的温度变化、夜间巡检拍摄等可通过无人飞行器搭载红外相机来实现。如对于危化品流体介质的泄漏或保温层破损导致的温度变化后果,可以制定如图3所示的巡检路线。
通过控制飞行器在设备两侧缓慢爬升,上升到预定高度后环绕容器中轴线进行环绕模式飞行,同时对容器的外表面泄漏情况和保温层破损情况进行红外拍摄,开展快速巡检作业;如发现设备有问题,控制飞行器处于悬停状态对有问题部位进行仔细拍摄,进入精细巡检作业模式。
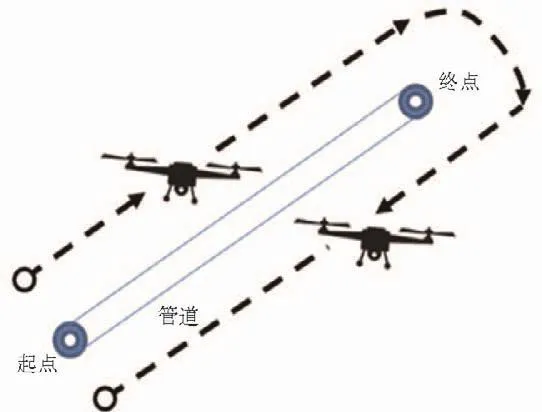
图2 压力管道的无人机巡检路线示意图

图3 介质泄漏的无人机巡检路线示意图
3 巡检案例分析
本研究的无人机巡检技术采用有效像素为1600万(分辨率为4608×3456)的云台相机和FLIR长波红外热成像云台相机(分辨率为640×512),无人机系统为大疆的T600型飞行器。无人机巡检可以实现的效果分析如下。
1)对于立式和水平布置特种设备的无人机巡检,宏观检查的效果就如人工进行的目视检查,可以就设备的总体运行情况、设备外表面锈蚀情况、外表面保温情况、安全附件运行情况、设备的“跑、冒、滴、漏”情况等进行拍摄检查。
2)装载红外热成像相机的飞行器,与人工巡检不一样,可以更准确地发现保温层破损情况。对某石化企业的乙烯球罐保温层破损情况进行检查,如图4所示,发现球罐的外部保温损坏部位为图4中的左上角,其温度较其他部位要高,说明该部位的保温材料有损坏。对于普通的目视检验或可见光相机所拍摄的图像,均未能有效发现该部位的保温层破损。究其原因,是外保温的保护金属层未破损,只是保护金属与设备外表面之间的保温材料已脱落导致该部位的温度出现异常。

图4 红外相机拍摄的温度变化图像
3)装载红外热成像相机的飞行器,可以准确地发现无色无味流体介质的泄漏和烟雾扩散。对某炼化企业储罐区一原料油储罐发生泄漏后引发火灾情况进行拍摄,如图5所示,发现了设备的介质泄漏和烟气扩散情况,可以清楚地看出发生泄漏的储罐和部位,及时发现安全隐患,进而采取应急处置措施。

图5 红外相机拍摄的介质泄漏图像
通过装载红外热成像相机,还可以实现无人飞行器的夜间飞行巡检,主要是在测试基地进行无人机夜间飞行和红外热成像拍摄测试。
总的来说,无人飞行器通过搭载红外热成像相机,可以对温度异常、流体介质泄漏、火灾烟雾等现象进行拍摄,为人工巡检难以发现这些问题提供强有力的辅助和补充。
无人机巡检案例和测试结果表明,通过操控无人飞行器,可实现对特种设备和危化品储存容器的巡检,获得设备安全状况信息,为是否需要采取进一步措施提供参考直观的图像依据。本方法的应用结果体现了以下特点:
1)提高了巡检工作效率,同时由于免除搭设脚手架而降低了作业成本。
2)容易对人工难以到达的位置进行检查。只要飞行空间允许,无人飞行器可以360°全方位进行飞行巡检,做到不留死角。对于外围辅助设施复杂的设备,由于受无人机飞行路线所限,无人机距离设备比较远,需通过高分辨率的摄像机才能对设备外表面进行有效的检查拍摄。
3)通过搭载红外热成像设备,可以实现红外热成像功能和夜间巡检,对设备外表面温度异常、流体介质泄漏、火灾烟雾等情况进行拍摄,是人工夜间巡检强有力的辅助手段。夜间飞行控制受到人的视线约束,无人机飞行距离有限。
通过对无人机飞行路线优化设计,可将最优的快速巡检路线储存在飞控系统内,实现快速巡检路线的调用;并根据需要随时人工控制悬停,启动精细巡检,完成后再切换到快速巡检路线的控制,从而降低无人机的操作难度,避免造成无人机或者设备的损坏。本研究的无人机巡检应用主要是研发测试,今后可望作为人工传统巡检的强有力补充。
4 结论
1)通过制定合理的基于无人机的特种设备和危化品储存容器巡检方案和飞行路线,实现了无人机技术在特种设备和危化品储存容器巡检中的应用,结果验证了无人机巡检的效果和优点。
2)搭载可见光相机和红外热成像相机的无人机,不仅可实现全方位的目视检查,还可有效发现温度异常、流体介质泄漏、火灾烟雾等问题,为夜间巡检和人工巡检提供强有力的辅助和补充。
3)本方法的实施应用是对特种设备和危化品储存容器经常性巡检、自行检查和定期检验技术手段的补充,大大提高了工作效率和宏观检验范围的覆盖率。
[1]TSG 21—2016 固定式压力容器安全技术监察规程[S].
[2]朱黎明,党彰,刘锦东. 浅谈无人机在突发性公共事件中的应用及启示[J]. 中国应急管理,2009,3(07):26-29.
[3]郑攀. 小型无人机在公共安全领域的应用前景展望[J]. 警察技术, 2013,29(04):53-55.
[4]韦文功. 利用无人飞机开展救灾的成功实践[J]. 中国减灾,2008,18(04):39.
[5]张伟,余晓伟,余泳昌. 电动多旋翼飞行器的特点及其在农业中的应用[J]. 现代农业科技, 2014(13):215-218.
[6]陈雷. 无人机在交通应急指挥领域的应用[J].中国交通信息化,2014,16(04):128-130.
[7]姜荟丛. 飞行器电力巡检探讨[J]. 山东电力技术,2012,39(05):46-68.
[8]李臻立,涂明,杜勇. 无人飞行器智能巡检应用研究[J]. 湖北电力,2012,36(04):41-42.
[9]赵晨,杜勇. 四旋翼无人机在输电线路巡视中的应用[J]. 湖北电力,2012,36(06):35-36.
[10]郑贵林,张丽. 自旋翼飞机电力巡线技术研究与应用[J]. 中国电力,2014,47(07):26-31.
[11]李勇. 无人飞行器在特高压交流输电线路巡视中的应用模式研究[D]. 北京:华北电力大学,2014.
[12]吕明. 基于多传感器协同检测的输电线路无人飞机巡检关键技术[D]. 上海:上海交通大学,2012.
[13]熊典,向文祥,王斌,等. 高压输电线路多旋翼无人机巡线技术及应用[C]. 2013年度学术年会第五届“智能电网”暨“电机能效提升”发展论坛论文集,2013: 5 0-54.
[14]杨成顺, 杨忠,葛乐,等. 基于多旋翼无人机的输电线路智能巡检系统[J]. 济南大学学报(自然科学版 ),2013,27(04):358-362.
[15]郑炯,杨景标,郭晋,等. 基于无人机的特种设备事故应急处置方法研究[J]. 中国特种设备安全,2017,33(08):9-12.
