汽车电磁兼容检测天线调整装置开环控制系统原理设计
2018-07-11谢曲
谢 曲
(1.柳州汽车检测有限公司,广西 柳州 545006;2.柳州市产品质量检验所,广西 柳州545000)
汽车控制装置的抗电磁干扰性能缺陷,使汽车控制性能降低甚至失效,严重影响汽车的安全行驶;汽车行驶过程产生的电磁骚扰,将造成环境的电磁污染。随着汽车电子化和电动汽车的发展,检测汽车的电磁抗干扰性能及其行驶过程产生的电磁骚扰限值,已经成为世界各国的强制性法规要求。电波暗室内检测时,需要调整天线相对地面和被测车辆的位置,目前需要停机后操作人员进入电波暗室内进行调整,存在效率低、操作人员容易受电磁辐射伤害等问题。为解决汽车电磁兼容(EMC)检测天线位置调整过程存在的问题,作者开发了汽车EMC检测天线调整装置,并获得了专利授权[1]。根据相关标准,在电波暗室内进行汽车EMC检测对检测环境的电磁性能有严格要求,由于开环控制系统在电波暗室内不需要传感器与电子设备,具有不产生额外的电磁骚扰能够保证电波暗室检测环境要求的特点。因此开环控制系统应用于汽车EMC检测天线调整装置的控制,具有特殊的可行性,本文介绍汽车EMC检测天线调整装置的开环控制系统的电原理设计方案。
1 汽车EMC检测天线调整装置简介
汽车EMC检测天线调整装置的总体结构如图1所示[1]。

图1 天线调整装置设计案例总体结构图
图1所示天线调整装置由调整执行机构、控制装置组成,调整执行机构包括液压站与距离调节液压缸组、液压缸座与摆动铰接总成、天线升降液压缸组。由于电波暗室造价昂贵,电波暗室的空间有限,为使天线调整装置在电波暗室有限的空间内实现足够的调整范围,以便能够检测较宽范围的车型,各液压缸采用伸缩缸。控制系统控制液压驱动系统配合液压缸,实现天线的位置、角度调整,满足不同车型、不同检测项目的检测要求。
2 天线调整装置的要求[2]
2.1 电波暗室电磁环境要求
进行电磁骚扰限值检测时,电波暗室的环境噪声电平应比标准要求的骚扰限值低6 dB以上。因此,要求汽车EMC检测天线调整装置(特别是其控制系统),尽可能降低工作过程产生的电磁噪声。
2.2 汽车EMC检测天线与被测汽车的相对位置、方向要求
汽车EMC检测天线与被测汽车的距离、高度均需要满足相关标准的规定。被检测车型不同外型尺寸不同,在汽车EMC检测转台上的位置不同;不同的检测项目与检测方法,对天线与被测汽车的相对位置要求不同;控制系统必须能够根据需要,控制执行机构调整检测天线的平面坐标、高度与角度。
(1)天线与被测汽车的相对位置要求
汽车EMC检测天线与被测件平面位置关系如图2所示。汽车EMC检测时,汽车在转台的转鼓上运行,根据不同车型,转鼓的轴线在转台上可以移动;标准要求对汽车的两个侧面进行检测,因此,完成被测汽车的一个侧面检测后,由转台带动被测汽车旋转180°进行另一侧面的检测。检测时,检测天线要正对被测件,以获得最佳检测效果。
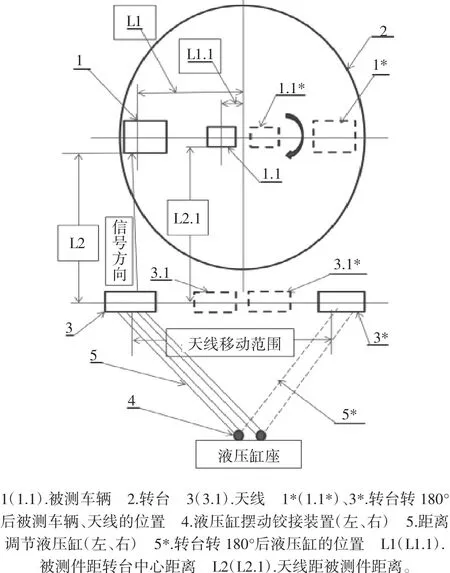
图2 汽车EMC检测天线平面位置示意图
因此要求控制系统能够控制执行机构,在较大范围内实现检测天线位置的调整。
(2)天线与被测汽车的相对方向要求
进行抗扰度检测时,波束窄的发射天线应始终指向被测件。采用10 m法进行电磁骚扰检测时,天线参考点到车辆或装置边缘的金属部分的水平距离为(10.0 m±0.2)m,天线中心离地板的高度为3.00 m±0.05 m,并要求天线处于最大敏感度方向。
控制系统必须能够根据需要,控制执行机构调整检测天线的空间角度(包括天线水平方向的角度与天线相对水平面的角度)。
3 汽车EMC检测天线调整装置控制系统的功能分析
根据以上电波暗室电磁环境要求,以及开环控制系统的特点,本文采用开环控制系统。由于不需要进行天线位置检测,电波暗室内没有电子装置,能够不产生额外的电磁干扰,可以更好地满足电波暗室电磁环境的要求。由于没有天线位置、角度检测,因此只能依靠控制天线座的移动量、天线平台升降高度与倾斜角度,来保证天线与被测汽车的相对位置、方向的要求。因此,对移动量的控制精度有较高要求。
本文以检测车辆规格范围为微型车到18 m大客车为例进行功能分析。
3.1 检测天线平面位置的调整
通常18 m大客车为后置后驱动。如图2所示,大客车发动机位于转台的最远端1,检测天线位于3;从大客车另一侧面进行EMC检测时,大客车发动机位于1*,检测天线位于3*,即检测天线需要从3调整到3*的位置。当检测微型车时,被测车辆位于图2中1.1、检测天线位于3.1;检测另一侧时,检测天线需要从3.1调整到3.1*的位置。进行微型车检测时,微型车发动机位于转台的最近端1.1、检测天线位于3.1;从微型车另一侧面进行EMC检测时,微型车发动机位于1.1*,检测天线位于3.1*,即检测天线需要从3.1调整到3.1*的位置。
根据不同检测方法的要求,天线距被测件距离可能为10.0 m±0.2 m或者3.00 m±0.05 m、或者2 m、或者按照抗扰度信号波长与被测车辆长度之间的关系确定[2]。
为实现以上调整,开环控制系统需要定量控制液压缸摆动铰接装置转过的角度,定量控制左、右液压缸伸出的长度。
3.2 检测天线水平面法线方向的调整
根据被测车辆的位置,调整检测天线水平方向角度,使接收天线处于最大接收信号的方向,或者使发射天线处于接地平面和被测件的极化方向。开环控制系统通过定量控制液压缸摆动铰接装置转过的角度,以及定量控制左、右液压缸伸出的长度实现。
3.3 检测天线高度与倾斜角度的调整
检测天线的立面示意见图1(b)。
根据不同车型的高度、布置,开环控制系统通过分别定量控制4个天线升降液压缸的供油量,实现检测天线高度与倾斜角度的调整。
4 汽车EMC检测天线调整装置开环控制系统原理设计
4.1 开环控制系统原理
汽车EMC检测天线调整装置开环控制系统原理如图3所示。

图3 开环控制系统原理框图
输入系统用于输入被检测汽车的车型参数、检测项目、检测方法等数据。
数据处理器根据输入的相关数据,计算形成被检测汽车与检测天线的位置关系与检测天线的坐标、角度值,并根据执行机构的结构参数计算各液压缸的供油量、摆动铰接液马达的供油量(或者铰接轮的转动角度),进而形成控制指令,并向驱动控制器发送控制指令。如前所述,为使机构紧凑并实现大范围调整,各液压缸采用伸缩缸,由于伸缩缸各段缸径不同,调整距离与需要的供油量关系不同,计算供油量时需要予以考虑。
驱动控制器根据控制指令,形成具有足够驱动能力的信号驱动各执行机构。
执行机构包括调整天线平面坐标与水平方向角度的液压缸组和摆动铰接装置,调整天线的高度与倾斜角度的天线升降液压缸组。执行机构由液压站及其驱动的距离调节液压缸组、液压缸座与摆动铰接总成、天线升降液压缸组等组成,各液压缸采用定量供油结构;液压缸摆动铰接装置可以采用定量液压马达,也可以是绳轮(或者带轮)带动的摆杆机构(该机构的摆杆为液压缸),绳轮(或者带轮)由安装在暗室外的电机驱动,暗室外电机采用步进电机或者伺服电机。
4.2 控制系统软件流程图
汽车EMC检测天线调整装置开环控制系统控制流程如图4所示。
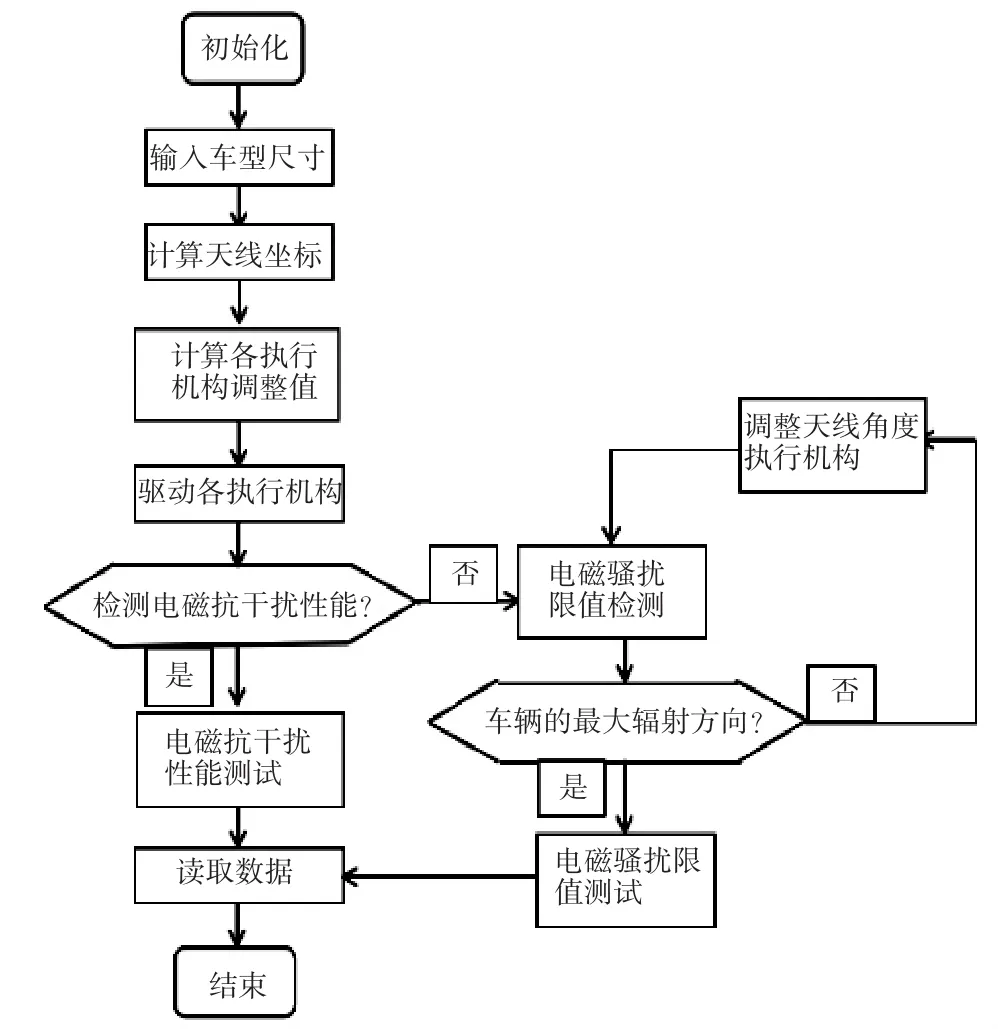
图4 开环控制系统软件程序框图
系统初始化进行检测与位置调整的准备,并使天线从初始位置开始进行位置调整。
“输入车型尺寸”模块输入被测车型的相关尺寸、检测项目的相关数据。“计算天线坐标”与“计算各执行器调整值”模块,根据输入的数据与标准要求,软件计算天线的坐标值与角度,并根据调整需要计算各液压缸与摆动铰接装置液压马达的供油量,或者驱动摆杆机构绳轮(或者带轮)步进电机的步数(或者伺服电机的转动角度)。进而驱动执行机构,使天线位置满足检测要求。
对于电磁骚扰限值检测,标准要求天线处于最大接收信号的方向,需要通过预扫描选取车辆的最大辐射方向,将反复执行“天线角度调整-检测电磁骚扰限值”程序,不断调整天线的方向,并对检测到的电磁骚扰限值进行比较,以确定被测车辆的最大辐射方向,最终获得检测车辆的最大辐射方向的电磁骚扰限值。
软件系统程序运行结束前,存储本次检测与调整的相关数据,并形成数据库文件,以便后续相同检测业务调用,并为后续的进一步研究提供数据积累。同时,使天线返回初始位置。
5 被测车辆的最大辐射方向的确定
为了确定被测车辆的最大辐射方向,需要反复执行“天线角度调整-检测电磁骚扰限值”程序,即天线位置调整装置需要与EMC检测设备交替工作,是天线位置调整耗时最长的过程。为尽可能减少该程序的循环次数,按照优化设计一维搜索的区间消去法[3],使检测天线接收信号的方向逐步逼近被测车辆的最大辐射方向。本设计采用最常用的黄金分割法进行区间消去(见图5)。图中表示最大辐射方向靠近a端的情况,区间消去的下一次搜索区间为(a,α2);若最大辐射方向靠近b端,则下一次搜索区间为(α1,b);以此类推。取黄金分割法区间缩短率λ=0.618.下一次搜索区间端点按照式(1)、(2)计算。

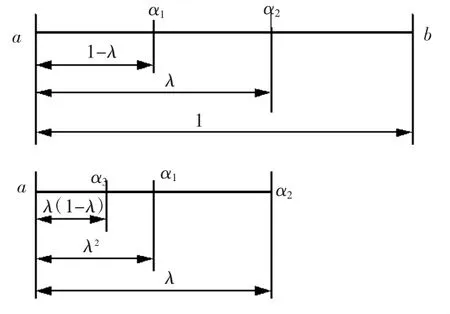
图5 黄金分割法区间消去示意图
(1)搜索区间(a,b)与下一次搜索区间端点的确定:
按照经验选取搜索区间,使搜索区间包含最大辐射方向。并在电磁骚扰限值检测子程序开始时输入搜索区间端点位置。无经验参考的情况下,以被测车辆的最外轮毂作为搜索区间。
(2)最大辐射方向的确定属于单峰函数确定最大值的问题。
(3)收敛精度的确定
以标准规定的检测精度作为收敛精度,当两次电磁骚扰检测值的差小于等于检测精度要求时,搜索结束,并取测得电磁骚扰的较大检测值作为电磁骚扰限值判断值。
6 结束语
本文在分析汽车EMC检测天线调整装置及其控制要求的基础上,对汽车EMC检测天线调整装置开环控制系统进行功能分析,并介绍该装置的开环控制系统的原理设计方案。该控制系统具有容易满足电波暗室内汽车电磁兼容性的检测环境要求的特点,并对各执行机构的定量控制,可以保证检测天线的位置与方向精度。
