基于补偿滑模神经网络的某炮控系统位置控制
2018-07-10王超周勇军闫守成周文君张德磊唐雄
王超 周勇军 闫守成 周文君 张德磊 唐雄


摘 要:针对某炮控系统存在较强的非线性和不确定性特征,提出了基于补偿滑模的自组织神经网络控制策略。引入了补偿滑模面设计方法,构成了自组织神经网络控制器和辅助补偿器。自组织神经网络控制器由Hermite多项式、变结构神经网络和神经元参数自学习算法构成,其减小了计算复杂度,提高了自适应能力;梯度下降法对神经网络的参数进行自学习,提高了系统的收敛速度;辅助补偿器的引入进一步减小了系统稳态误差,满足了该炮控系统的基本指标要求,保证了系统在Lyapunov意义下的稳定性和鲁棒性。半实物仿真试验表明:该控制策略有效地提高了系统的控制精确度和鲁棒性,减小了外界干扰对系统性能的影响。
关键词:炮控系统;补偿滑模面;自组织;神经网络;Lyapunov稳定
中图分类号:TP 249
文献标志码:A
文章编号:1007-449X(2018)06-0114-09
Abstract:A selforganizing neural network with complementary sliding modes control strategy is proposed for the strong nonlinearities and uncertainties of a gun control system (GCS), which consists of the selforganizing neural network controller (SNNC) and the auxiliary compensation controller (ACC) with the complementary sliding mode surface. The selforganizing neural network controller included a Hermite polynomial, a variable structure selforganizing neural network (VSSNN) and selflearning parameters with the gradient descent method, which reduced the computational complexity and accelerated the ability of adaptation.The gradient descent method adjusted parameters of the neural network and promoted the convergence rapidity. The auxiliary compensator was introduced to further reduce steadystate error of the system, which satisfied the basic indicators of requirements and guaranteed the stability and robustness of the system in the sense of Lyapunov. The semiphysical test simulation shows that the control strategy greatly improves the control accuracy and robustness of the system, and effectively eliminates the influence of disturbance in the system.
Keywords:gun control system; complementary sliding modes; selforganizing; neural network; Lyapunov stability
0 引 言
炮控系統(gun control system, GCS)性能是衡量武器作战能力的重要指标之一,快速、精确、稳定的调炮是实现“先敌开火、首发命中”的保证。全电式炮控系统凭借结构简单、性能优良、效率高、“二次危害”小等优点,已成为各国研究炮控系统的热点。某炮控系统采用交流永磁同步电机驱动伺服系统,但其同样存在较多的非线性因素,如齿圈间隙、弹性变形、摩擦力矩等等,导致该武器炮控系统出现低速“爬行”和稳态“平顶”等问题[1]。
针对炮控系统中存在的齿圈间隙,文献[2]建立了包含齿隙模型的机理模型,取得了一定的控制效果,但忽略了系统中其他因素的影响。针对炮控系统中存在的摩擦非线性,文献[3]和文献[4]简化摩擦力矩模型,其控制策略不具有一般性。基于机理建模方法实现的控制策略,在炮控系统外界干扰发生变化时不能作出快速的响应和跟踪。传统的控制方法机理简单,不能有效适应系统非线性扰动的影响,为了进一步提高系统稳定性和控制精确度,智能控制算法得到了广泛的应用,克服了建立机理模型时部分因素考虑不完善的缺点。滑模变结构控制作为一种特殊的鲁棒控制方法,能够提取控制系统当前运动状态,在解决不确定非线性系统的控制问题上显示了巨大的生命力。虽然其对外界干扰具有很强的鲁棒性和完全的自适应性,但文献[5]构造的滑模面切换速度较慢,导致响应时间太长;文献[6]和文献[7]的优点在于针对该炮控系统的特点,融合多种智能控制算法,缺点是未结合炮控系统的实际工作情况进行半实物仿真试验。神经网络对非线性系统较强的近似能力,但是由于内部参数扰动和外部系统干扰,实际系统的理想模型很难得到[8]。文献[9]系统地分析了神经网络在炮控系统的应用,但是存在收敛速度慢、跟踪精确度不高的问题。前人的研究结果表明,两种算法的有效结合,以及常用的诸如扰动观测器等补偿控制等,可以进一步补偿系统存在的近似偏差,保证控制算法的稳定性,提高了系统的控制性能和鲁棒性[10-13]。
结合上述文献,以某武器炮控系统为研究对象,提出一种基于补偿滑模面的自组织神经网络控制器。考虑到系统自身存在较强的非线性和外部干扰等,设计了在Lyapunov意义下系统稳定的辅助补偿器,保证了系统的控制精确度和鲁棒性。通过半实物仿真试验,进一步验证了该控制策略的有效性和实用性。
1 某武器炮控系统
在实际作战中,敌方目标或者炮车自身位置实时变化,因此炮控系统必须能够在运动中调转火炮角度来实时锁定敌方目标,要求火炮具有快速实时瞄准和稳定的性能,所以炮控系统既要有对火炮实施瞄准的速度控制系统,又要保持火炮稳定的位置控制系统。速度控制系统一般借助于与电机相匹配的驱动器实现,位置控制系统则是通过优化的控制算法实现。文中该炮控系统水平向和高低向均采用永磁交流同步电机控制,考虑到该电机具有自身耦合等问题,采用面向磁场的矢量控制电机可以实现对电压、电流和磁势等变量的解耦。由文献[14]可知,在电机交轴电流id=0控制方式下,可以近似地表示成直流电机的模型。其系统框图如图1所示。
2 补偿滑模自组织神经网络控制器
考虑到该控制系统存在强非线性特点,采用基于神经网络的智能控制器,该控制器主要由自组织神经网络控制器(selforganizing neural network controller,SNNC)和辅助补偿器(auxiliary compensation controller,ACC)构成,设计了基于Lyapunov意义下系统稳定的控制器,保证了实际系统的控制精度和鲁棒性。前者由Hermite多项式、变结构神经网络和参数自学习算法构成,作为武器炮控系统的主控制器,实现对其进行稳定控制;后者则依据滑模面的输出,作为该武器炮控系统的辅助控制器,实现对其进行快速、精确控制。如图2所示,其中uSNNC和uACC分别是SNNC和ACC的输出,设计的复合控制器输出为
2.1 自组织神经网络控制器设计
2.1.1 基于Hermite多项式的神经网络控制器
该控制器结构主要包括成5个部分,分别是输入层、Hermite层、接收层、隐含层、输出层,对应如图3所示。
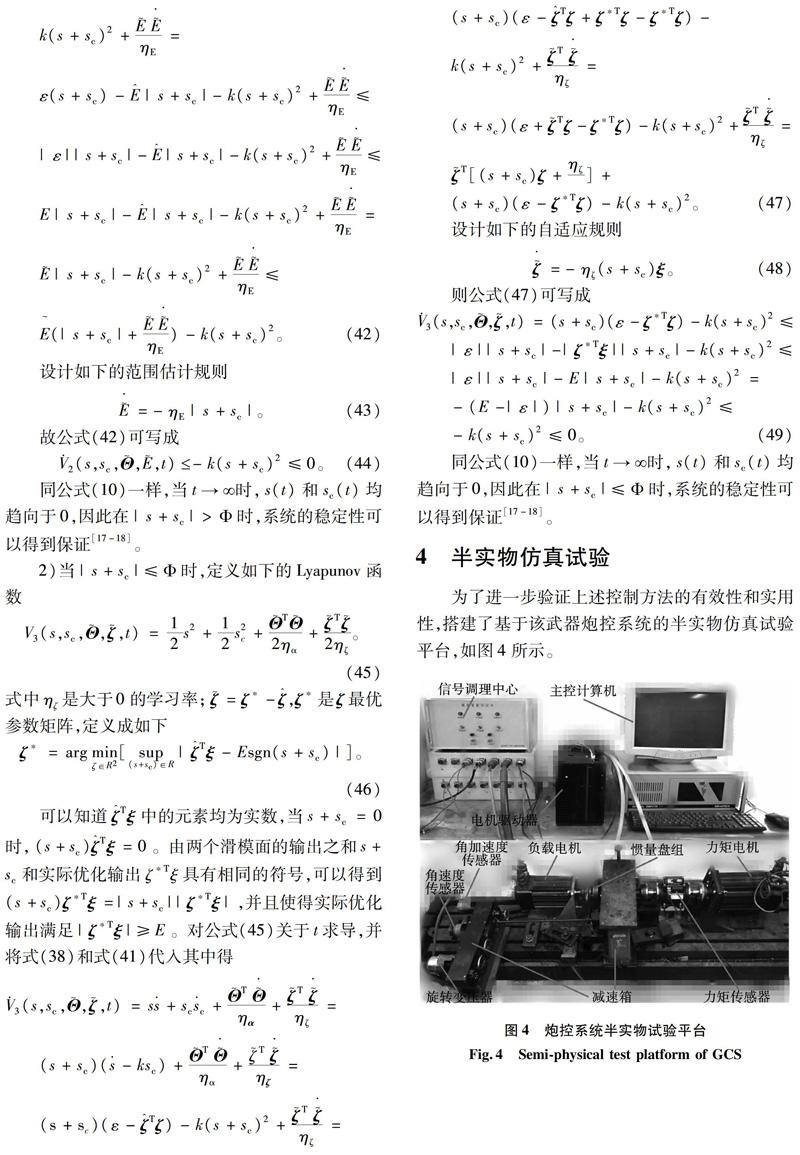
4 半实物仿真试验
为了进一步验证上述控制方法的有效性和实用性,搭建了基于该武器炮控系统的半实物仿真试验平台,如图4所示。
该炮塔的转动惯量为7 000 kg·m2,总摩擦力矩Mf≤1 200 N·m,重心位置在炮塔旋转中心正前方l=0.35 m处,选取该武器的水平分系统为研究对象,技战术指标要求水平向最大调炮速度vmax≥0.611 rad/s,最小瞄准速度vmin≤0.000 436 rad/s,最大调炮加速度αmax≥0.873 rad/s2,传动比353,故选取水平向的电机额定功率3.4 kW,额定转速2 500 r/min。结合水平向电机相关标称值和试验结果分析,对应的炮控系统相关参数如表1所示。
针对该武器炮控系统主要工作在装填调炮和稳瞄两种工作状态,前者根据系统阶跃和变目标响应,突出体现其在大范围装填调炮时的快速性,首先结合文献[12],比较非线性干扰观测器控制器(nonlinear disturbance observer controller, NDOC)和提出算法的优越性,如图5所示;后者结合系统进行正弦跟踪和等速跟踪情况,显著表明其在小范围和大范围装填调炮时的穩定性,如图6、图7和图8所示。
由图5可知,该阶跃响应的稳态值是1 rad,图中比较了相同条件下SNNC、SNNC and ACC、VSSNNC and ACC、NDOC的阶跃响应情况,对应的稳定误差和稳定时间如表2所示。NDOC和SNNC在系统稳定时存在1.16%的稳态误差,不符合炮控系统指标要求。在结合ACC后,SNNC and ACC的稳定精确度达到了0.45%,进一步分析系统的快速性可知,VSSNNC and ACC比SNNC and ACC的调节时间要短0.5 s,且稳定精确度要高0.29%。在t=3.0 s时,改变阶跃响应目标值为0.85 rad, VSSNNC and ACC经过0.45 s进入稳定状态,SNNC and ACC经过0.73 s进入稳定状态,凸显VSSNNC结合ACC后具有较好的动态特性和较强的鲁棒性。
考虑到该炮控系统的自身特性和实际负载情况,在稳瞄阶段,1 s内炮塔变化角度≤0.108 rad(在半实物仿真试验时,减速箱输出轴和实际炮塔转动轴的传动比一致),选取理想位置信号为y=0.1sin(0.5πt),采用VSSNNC and ACC进行跟踪,试验结果如图6(a)~图6(e)所示,控制周期5 ms。
由图6(a)、6(b)可知,系统的调节时间为0.36 s,稳态误差为1.16%,符合系统指标要求;图6(c)、6(d)表明,系统在换向过程中,受齿隙、摩擦等引起的非线性因素影响,出现较大的波动,加速度的变化尤为明显,范围在-0.289~0.296 rad/s2。
根据上述试验结论,考虑到在大范围装填调炮和换向时可能存在的较大波动,选取理想位置信号y=sin(0.5πt),采用VSSNNC and ACC进行跟踪,对应的试验结果如图7所示。
由图7(a)可知,系统在转向部分角加速度波动仍旧较大,变化范围为2.586~2.634 rad/s2,和图6(d)相比较,大范围角加速度波动范围相对较小;结合图6(e)和图7(b)可知,忽略起始阶段影响,前者需要隐含神经元数目为6~8,后者相对较少,且稳定后较前者隐含神经元数目少1,但两者在转向部分神经元数目均有所增加。
考虑到炮控系统低速跟踪目标时,系统内部存在摩擦力矩,出现低速爬行现象,待调转速度足够大时,系统摩擦力矩的影响可忽略不计。根据炮控系统总摩擦力矩Mf和传动比,选取电机轴上的摩擦力矩Tf=2.5sin(πt),以最小瞄准速度v=0.000 5 rad/s匀速调转进行位置跟踪仿真,如图8所示。由图可知,在炮控系统零速时,受摩擦力矩影响较大,待1.95 s后系统进入稳定状态,位置跟踪出现“平顶”现象,稳态误差为0.000 48 rad,满足系统控制精确度要求。
综合上述试验结果,该控制策略具有较高的控制精确度和较强的鲁棒性,完全适用于该武器炮控系统的控制。
5 结 论
针对该武器炮控系统存在的不确定性和复杂的非线性特点,提出了补偿滑模自组织神经网络控制器,并对其进行半实物仿真试验,得出如下结论:
1)VSSNNC and ACC相对SNNC、SNNC and ACC和NDOC拥有较高的控制精确度和较强的鲁棒性,能够满足各项技战术指标要求,符合当前研制新型战车的迫切需求。
2)该控制器在炮控系统大范围调转时的性能相对小范围调转更为优越,在最小瞄准速度匀速调转时,存在低速“爬行”和“平顶”现象,特别是火炮换向时,跟踪精确度相对较低且控制复杂度较高,下一步的工作将研究分析换向部分可能存在的非线性因素对该炮控系统的影响情况。
参 考 文 献:
[1] 马晓军,王福兴,袁东.全电式炮控系统非线性特性及其控制策略[J]. 装甲兵工程学院学报, 2011, 25(1):63.
MA Xiaojun, WANG Fuxing, YUAN Dong.Nonlinearity characteristics and its control strategies of allelectric tank gun control system [J].Journal of Academy of Armored Force Engineering, 2011,25(1):63.
[2] 李匡成.坦克炮控系统齿隙非线性建模与补偿控制策略分析[J].微特电机,2010,6(1):45.
LI Kuangcheng. Modeling and compensation control analysis of backlash nonlinearity in gun control system of tanks[J].Small & Special Electrical Machines,2010,6(1):45.
[3] 张文静,台宪青.基于LuGre模型的火炮伺服系统摩擦力矩自适应补偿[J].清华大学学报,2007,47(2):1756.
ZHANG Wenjing, TAI Xianqing. Adaptive friction compensation in gun servo systems based on the LuGre model[J].Journal of Tsinghua University,2007,47(2):1756.
[4] 蔡建平,沈陆娟.坦克炮控伺服系统未知摩擦的自适应补偿控制[J].火力与指挥控制,2013,38(4):64.
CAI Jianping, SHEN Lujuan. Adaptive compensation of unknown friction for gun control servo system of tank[J]. Fire Control & Command Control, 2013, 38(4):64.
[5] 颜景斌, 王飞, 王美静, 等. 改进滑模变结构控制光伏系统最大功率点跟踪[J]. 哈尔滨理工大学学报, 2016, 21(4): 106.
YAN Jingbing, WANG Fei, WANG Meijing, et al. Improved sliding mode control of maximum power point tracking of solar photovoltaic systems [J]. Journal of Harbin University of Science and Technology, 2016, 21(4):106.
[6] 冯亮, 马晓军, 闫之峰,等. 坦克炮控系统自适应模糊滑模控制方法[J].电机与控制学报,2007,11(1):65.
FENG Liang, MA Xiaojun YAN Zhifeng,et al. Method of adaptive fuzzy sliding mode control of gun control system of tank[J]. Electric Machines and Control, 2007, 11(1):65.
[7] 馮亮,马晓军,冯东,等.坦克炮控伺服系统的滑模非线性摩擦补偿控制[J].火力与指挥控制, 2008,33(12): 63.
FENG Liang, MA Xiaojun, FENG Dong,et al.Sliding mode nonlinear friction compensation control of gun control servo system of tank[J].Fire Control and Command Control, 2008,33(12):63.
[8] 宋清昆, 刘 一. 免疫遗传算法小波神经网络控制器设计[J]. 哈尔滨理工大学学报, 2015, 20(4):55.
SONG Qingkun, LIU Yi. Immune genetic algorithm of wavelet neural network controller design[J]. Journal of Harbin University of Science and Technology, 2015, 20(4):55.
[9] 冯亮,马晓军,闫之峰. 坦克稳定器的神经滑模控制方法[J]. 装甲兵工程学院学报, 2006,20(5):61.
FENG Liang, MA Xiaojun, YAN Zhifeng. Method of neural network sliding mode control of tank stabilizer[J]. Journal of Academy of Armored Force Engineering, 2006, 20(5):61.
[10] 马晓军,冯亮,袁东.坦克炮控系统非线性特性及自适应补偿控制[J].火力与指挥控制, 2010,35(11): 1.
MA Xiaojun, FENG Liang, YUAN Dong. Overview of adaptive compensation control of nonlinearity in the tank gun control system [J]. Fire Control and Command Control, 2010,35(11):1.
[11] 马晓军,袁东,臧克茂,等. 数字全电式坦克炮控系统研究现状与发展[J].兵工学报, 2012,32(1): 70.
MA Xiaojun, YUAN Dong, ZANG Kemao,et al.Research on situation and development of digital allelectrical gun control system of tank[J]. Acta Armamentarii, 2012,32(1):70.
[12] 于靖,陈谋,姜长生.基于干扰观测器的非线性不确定系统自适应滑模控制[J].控制理论与应用,2014,31(8): 993.
YU Jing, CHEN Mou, JIANG Changsheng. Adaptive sliding mode control for nonlinear uncertain systems based on disturbance observer[J].Control Theory & Applications,2014,31(8):993.
[13] 叶镭,夏元清,付梦印,等.无人炮塔炮控系统自抗扰控制[J]. 控制理论与应用, 2014,31(11):1580.
YE Lei, XIA Yuanqing, FU Mengyin et al. Active disturbance rejection control for gun control system of unmanned turret[J]. Control Theory & Applications, 2014, 31(11):1580.
[14] 郭犇.电动负载模拟器的控制系统研究[D]. 哈尔滨:哈尔滨工业大学,2012:31.
[15] 高强,候润明,杨国来,等.基于分数阶神经滑模的某顶置火炮调炮控制[J].兵工学报,2013,34(10):1311.
GAO Qiang, HOU Runmin, YANG Guolai,et al. Adjustment and control of a certain topmounted gun based on a novel fractional order neural sliding mode strategy[J]. Acta Armamentarll,2013,34(10):1311.
[16] CHUNFEI H,BOREKUEN L.FPGAbased adaptive PID control of a DC motor driver via slidingmode approach[J]. Expert Systems with Applications, 2011, 38(9):11866.
[17] CHUNCHIEH W,JUHNGPERNG S.Composite sliding mode control of chaotic systems with uncertainties[J]. International Journal of Bifurcation and Chaos, 2003, 13(4):863.
[18] SLOTINEJEANJACQUES E,WEIPING L.Applied nonlinear control[D].PrenticeHall,Englewood Cliffs,NJ,1991:301.
[19] CHUNFEI H.Intelligent control of chaotic systems via selforganizing Hermitepolynomialbased neural network [J]. Neurocomputing,2014,123(0):197.
[20] CHUNFEI H,Selforganizing adaptive fuzzy neural control for a class of nonlinear systems, IEEE Transactions on Neural Networks, 2007, 18(4):1232.
[21] CHIHMIN L,HSINYI L.Selforganizing adaptive wavelet CMAC backstepping control system design for nonlinear chaotic systems[J].Nonlinear Analysis: Real World Applications,2013,14(1):206.
[22] CHUNFEI H.A selfevolving functionallinked wavelet neural network for control applications[J]. Applied Soft Computing, 2013,13(11):4392.
(編辑:贾志超)
