基于模型设计的4WIS-4WID车辆教学实验平台
2018-07-09金昌勇
来 鑫, 姜 淳, 金昌勇, 秦 超
(上海理工大学 机械工程学院,上海 200093)
0 引 言
分布式驱动电动车辆的主要特征是将驱动电动机分散布置在驱动轮内或附近,具有传动链短、传动效率高、结构紧凑等优点[1],通过冗余可控自由度的协调控制来分配与优化驱动力与制动力,能极大地提高车辆能耗、主动安全性等性能,成为未来电动车辆重要的发展方向,受到国内外高度重视与关注[2-3]。四轮独立驱动 (Four Wheel Independent Drive,4WID)电动车辆是典型的分布式驱动电动车辆,在4WID车辆上进一步引入四轮独立转向技术及线控转向技术,形成了线控四轮独立转向-独立驱动 (4WIS-4WID)车辆这一新型车辆架构,该车辆除了继承分布式驱动电动车辆的优点外,可控自由度冗余度更大,车辆的机动性及可操纵性更高,可实现前轮转向、后轮转向、四轮转向、任意点转向、原地转向、直行、斜行、蟹行等多种转向模式,广泛应用于工业、农业、军事、宇宙探索等多个领域,具有广阔的应用前景,成为车辆领域的研究热点[4-17]。
4WIS-4WID车辆作为一种新型电动汽车结构,很多功能的实现都是由电子控制系统实现,涉及了机械工程、电工电子技术、嵌入式系统、控制理论及工程、车辆工程等多个学科的知识,是一个典型的多学科交叉系统。因此,开发一种具有线控转向功能的4WIS-4WID电动车实验平台对研究4WIS-4WID车辆的控制策略与算法十分重要。同时该平台对于车辆工程及机械电子工程本科生来说,是一个非常好的教学实验平台。利用该平台可以开设多个实验,让学生了解前沿的电动汽车及先进的控制系统开发方法。本文从科研及教学两方面的需求出发,设计一种线控4WIS-4WID车辆综合教学实验平台。该平台的控制系统设计采用了目前流行的基于模型设计的方法,非常方便科研及教学方案的实施。
1 4WIS-4WID车辆总体结构
本文所设计的4WIS-4WID电动实验车辆的独立转向及独立驱动的基本原理如图1所示,其中四轮独立转向是通过安装在每个车轮内的轮毂电动机实现,四轮独立转向实验车采用柱式悬架线控四轮独立转向系统。电动机及电动机减速器固定在车身上,转向动力传递链为:电机→减速器→主销套筒→上起落架→下起落架→主销活塞,实现转向。车轮动载荷传递链为:车轮→主销活塞→弹簧阻尼→主销套筒→电机及电机减速器→车架。该方案其实是一种新式烛式悬架,利用起落架传递转向扭矩,弹簧阻尼传递动载荷。与传统烛式悬架相比,能够有效地缓解主销磨损。通过主销上角度传感器可以实时地采集车轮的当前转向角度,并通过对电机的控制使车轮的转向实时跟随,使车轮转向角达到理想状态。
设计的4WIS-4WID车辆的控制系统结构及信号流如图2所示。可以看出,该控制系统的核心为对8个电动机(4个转向电动机及4个驱动电动机)进行协调控制。该控制系统由中央控制系统、驱动控制系统、转向控制系统、驾驶员意图判断系统构成:转向控制系统控制4个转向电动机实现独立转向;驾驶员意图判断系统通过采集油门踏板开度、方向盘角度输入、触控屏信号输入以及转向模式输入等信息,判断驾驶员的意图;驱动控制系统通过独立控制4个轮毂电动机完成4个车轮的独立驱动功能;中央控制器采用MotoHawk 控制器,该控制器具有丰富的接口与软件资源,并与Matlab/Simulink实现无缝集成,自动实现仿真程序的编译及代码的自动生成,是目前一种主流的控制系统程序快速开发方法;驾驶员意图判断系统中的方向盘与转向系统之间没有机械连接,是一种线控转向结构。四轮独立转向控制过程如下:中央控制器实时采集安装在方向盘转向轴的角位移传感器信号与控制面板上的转向模式的选择信号,通过一定的控制策略算出4个独立车轮的目标转向角,进而实时控制4个车轮的转向角,完成转向进程。四轮独立驱动控制的基本原理是控制器根据传感器信号判定车辆的行驶状态,同时考虑地面附着条件和驱动电动机的约束条件并计算出车辆所需总驱动力矩,然后优化分配各驱动轮上的驱动力矩。

1-轮胎,2-轮毂电动机,3-制动盘,4-柱式悬架支撑平台,5-蜗轮蜗杆减速机,6-车轮转角传感器,7-转向电动机,8-上滑柱,9-起落架上摆臂,10-减震器,11-弹簧,12-起落架下摆臂,13-制动钳,14-下滑柱,15-副车架,16-副车架连接杆,17-车架,18-悬架支撑平台加强筋
图1 4WIS-4WID车辆的基本结构

图2 4WIS-4WID车辆的控制系统结构及信号流
2 4WIS-4WID车辆的测控方案
设计的4WIS-4WID车辆实验平台的测控方案如图3所示。中央控制器(MotoHawk)与触控屏、轮毂电动机驱动器、数据采集系统(利用LabVIEW软件编写)、MotoTune模块之间均采用 CAN 通信传递信号,可扩展性及稳定性好。MotoTune为MotoHawk的程序下载、数据在线监控及标定模块。中央控制器通过I/O端口输出8路脉冲信号,分别控制4个转向电动机(采用的是伺服电动机)的转向角及方向。4个车轮的转向角通过4个转角传感器进行测量,中央控制器通过AD采样端口采集转角传感器、电子油门踏板、控制面板的开关信号、方向盘角位移信号等。

图3 4WIS-4WID实验车辆的测控方案示意图
3 基于模型设计的控制系统开发
基于模型设计(Model-based Design,MBD)方法是一种能实现Matlab/Simulink算法模型到嵌入式C代码的一键自动生成的先进方法。该方法在整个开发过程中从仿真程序直接到应用程序,不需手写代码,不会出现程序语法错误,同时硬件驱动直接自动集成到模型中,只需设置少量参数便可完成寄存器配置等底层工作,极大提高了软件的开发速度,降低软件开发的难度,节省了开发费用。MBD方法在国外得到广泛应用与认可,成为了汽车电子及控制系统开发的主流方法,目前在国内该方法主要在企业中得到了应用,高校(特别是对于本科生)很少涉及这种高效而先进方法的介绍。因此,把MBD方法引入到大学生的学习与研究体系之中是十分必要的。
本文采用的MBD方法是建立在Moto Hawk平台上的。Moto Hawk是在Matlab/Simulink环境下安装的一个功能模块库插件,该插件与Matlab无缝集成。Moto Hawk库中包含了例如 Analog I/O Blocks(模拟信号输入输出)模块、Build(编译器)模块、CAN Blocks(CAN 总线)模块、Calibration & Probing Blocks(标定、显示)模块等模型。软件开发采用Matlab/Simulink/Stateflow编写具体的控制算法,然后进行仿真分析,确保算法的有效性,Moto Hawk编写或配置与控制器硬件相关的功能(包括底层模块以及相应的接口设置),之后即可生成将仿真程序直接编译成硬件平台可识别与使用的应用程序,过程如图4所示。Moto Tune是硬件平台提供的一种用于程序下载控制、参数标定、数据显示的软件,可以在该软件中进行参数的实时调试工作。控制器采用ECM-0565-128,该控制器具有2路高速CAN总线,1路CAN总线通过Kvaser CAN与Moto Tune相连,用于程序下载与数据监控,另外1路CAN总线通过CAN转USB接口与上位PC机上相连,进行数据的显示与记录。
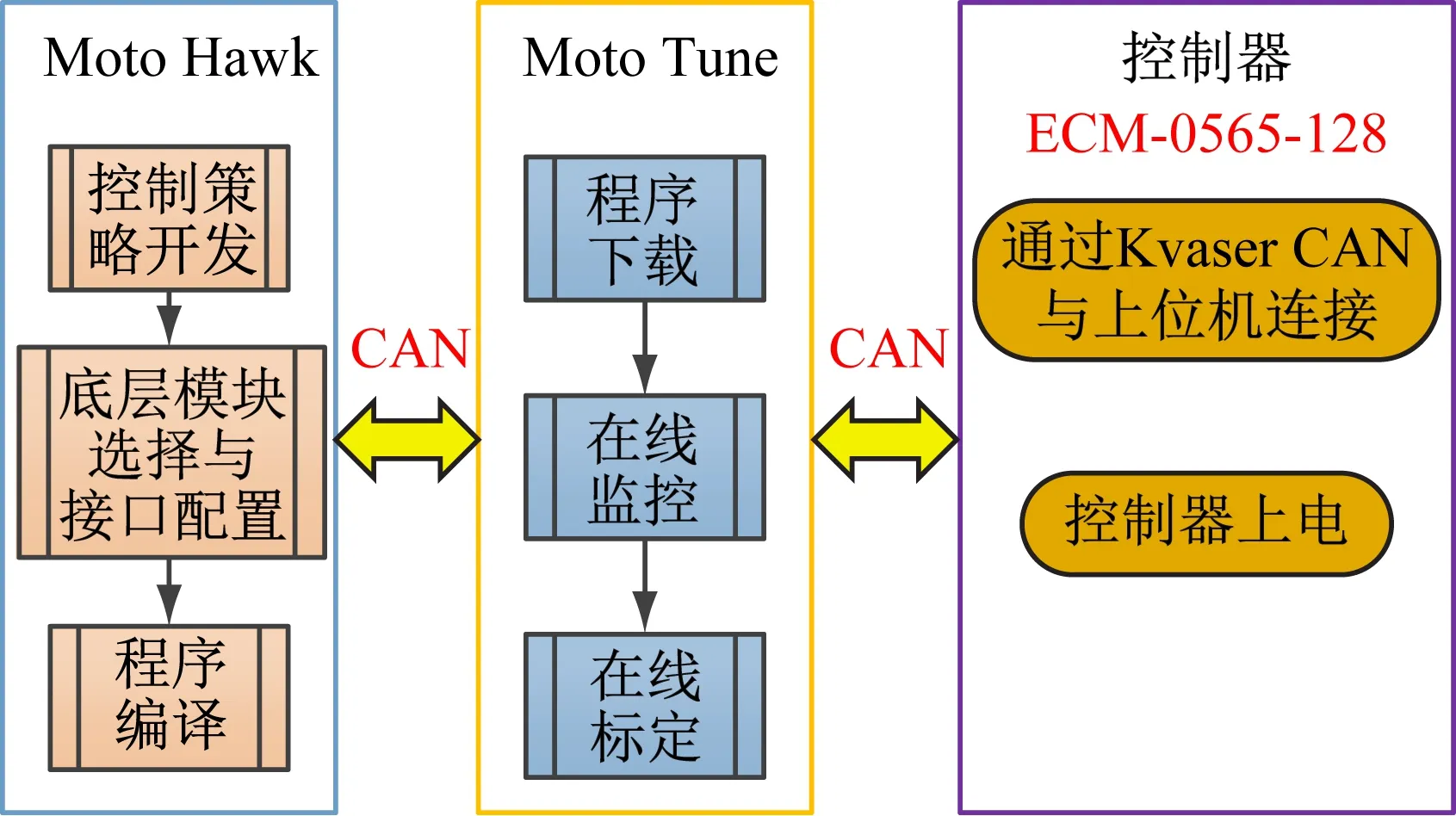
图4 基于模型设计开发流程
4 数据采集系统设计
为了实时显示及记录实验数据及其动态过程,需要设计数据采集与记录系统。本实验平台采用LabVIEW编写上位PC机界面,通过 USB-CAN数据卡实现PC机与CAN总线的连接,直接从CAN总线上读取感兴趣的数据。由于LabVIEW 软件不支持此类USB-CAN数据卡设备,因此本文采用LabVIEW调用动态连接库(DLL)的方式实现上下位机之间的数据交换。CAN/USB接口卡一般都提供了DLL库文件,通过LabVIEW直接调用库文件中的库函数,在界面上实现CAN设备的打开、初始化(包括波特率、CAN通道、ID号的设置) 、数据标定、数据读写、设备关闭等操作,完成CAN总线上数据的读写。
所设计的数据采集及记录系统如图5所示。采用LabVIEW编写的线控4WIS试验样车整车数据采集及显示系统,该系统可以实现整车数据的实时显示以及存储功能。左面4个示波器分别显示整车中央控制器发送的4个转向轮目标转角以及转角传感器检测到实时转角波形曲线,它们的实时值会在右边显示。同时本系统可以采集方向盘转角、转向模式、车速、标志位等信息并显示。该系统另外一个重要的功能是将采集的试验数据存储到自定义文件名的Excel表格中,方便实验后实验数据的处理与分析。

图5 4WIS-4WID实验车辆数据采集系统
5 实验研究
开发的实验车辆如图6所示。利用该实验平台即可对该车辆的动力学与运动学控制、运动轨迹规划等方面的科学研究与教学实践。该平台具有4WIS-4WID车辆高智能、高机动性等方面的优点。控制系统的实现通过基于模型设计的方法,不必把大量时间花在繁琐的代码设计与调试上,而可以把主要精力放在控制程序的设计及仿真方面,大大提高了控制系统开发的效率。

图6 4WIS-4WID实验车辆
利用该实验平台可以开展多个实验项目。图7为测试所提出的某协调控制策略有效性的实验数据,该实验数据是通过数据采集系统得到。图7(a)为前车轮转向模型下各车轮转向角的测量结果,程序设计时在1.3 s某个车轮转向角突然变化某个角度(模拟外界干扰)。从4个车轮的响应曲线来看,当某个车轮受到外界干扰转向角发生改变时,4个车轮的转向角都会发生改变,证明了所提出的协调控制策略的有效性。图7(b)为车辆平移状态时的实验曲线。以上实验充分说明了所设计的4WIS-4WID实验车辆的有效性及控制系统设计的便利性。
6 结 语
本文设计了一种4WIS-4WID电动车实验平台,介绍了该实验平台的结构原理、测控方案、控制系统及收据采集系统的设计,并通过实验验证了该实验平台的有效性。为了控制系统开发的便利性,该实验平台采取目前先进的基于模型设计的方法,大大提高程序开发的效率与便利性。本文所设计的实验平台为4WIS-4WID车辆的研究与多个实验项目的教学与实践提供了平台,也为基于模型设计的控制系统开发方法在高校中的教学提供了实践条件。
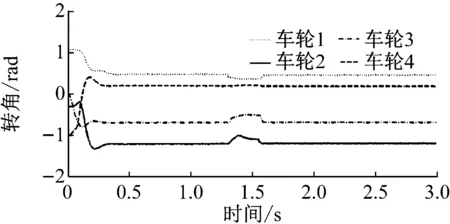
(a) 前轮转向
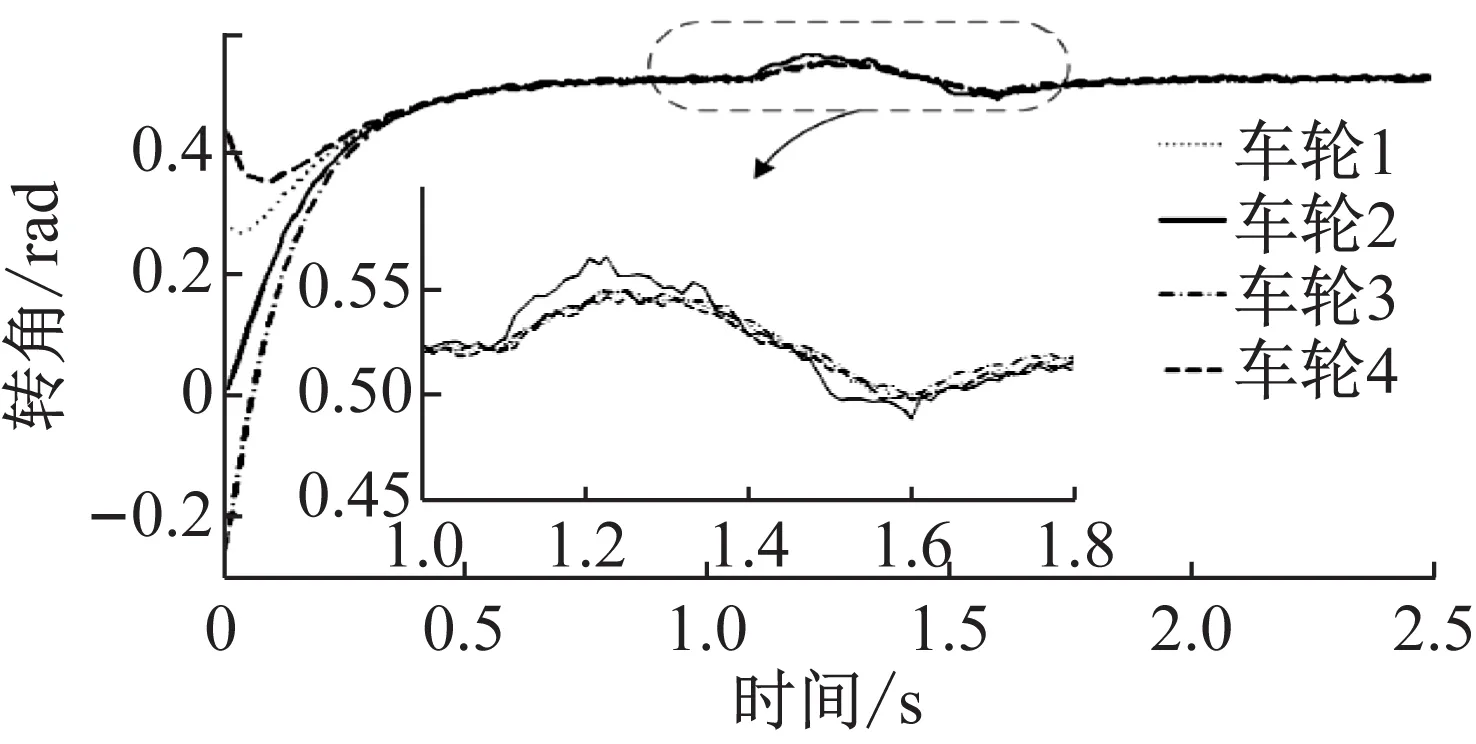
(b) 平移状态
图7 4WIS-4WID车辆实验结果
参考文献(References):
[1] 余卓平,冯 源,熊 璐. 分布式驱动电动汽车动力学控制发展现状综述 [J]. 机械工程学报,2013,49(8):105-115.
[2] 陈国迎.四轮独立线控电动汽车实验平台搭建与集成控制研究策略 [D].长春:吉林大学,2012.
[3] 马 雷,贡士娇,李 斌,等.四轮独立转向电动车转向控制方法 [J].汽车工程,2015,37(9):1029-1034.
[4] Yin G D,Chen N, Wang J X. A Study on μ-synthesis control for four-wheel steering system to enhance vehicle lateral stability [J]. Journal of Dynamic Systems, Measurement, and Control, 2011, 133(1): 1-6.
[5] Tu X Y. Robust navigation control and headland turning optimization of agricultural vehicles[D]. Iowa State:Iowa State University, 2013.
[6] Hori Y. Future vehicle driven by electricity and Control-research on four-wheel-motored "UOT electric march II"[J].IEEE Transactions on Industrial Electronics, 2004, 51(5):954-962.
[7] 来 鑫,陈辛波,武晓俊,等. 四轮独立驱动与转向电动车辆运动控制系统及控制策略研究[J].汽车工程学报,2015,5(5):334-340.
[8] Wang J,Wang Q, Jin L,etal. Independent wheel torque control of 4WD electric vehicle for differential drive assisted steering[J]. Mechatronics, 2011, 21(1): 63-76.
[9] Christensen T B. Modularised eco-innovation in the auto industry [J]. Journal of Cleaner Production, 2011, 49(2): 212-220.
[10] Lam T L,Qian H H,Xu Y S. Omnidirectional steering interface and control for a four-wheel independent steering vehicle [J]. IEEE/ASME Transactions on Mechatronics,2010, 15(3):329-339.
[11] 杨福广,阮久宏,李贻斌,等. 基于T-S模型的4WS汽车转向角协调控制研究[J]. 系统仿真学报,2009,21(11):3356-3361.
[12] 杨福广,阮久宏,李贻斌,等. 4WID-4WIS车辆横摆运动AFS+ARS+DYC模糊控制 [J]. 农业机械学报,2011,42(10):6-13.
[13] Fu Y L,He X,Ma Y L. A Navigation robot with reconfigurable chassis and bionic wheel [C]//Proceedings of the 2004 IEEE International Conference on Robotics and Biomimetics.[s.n.],2004:485-489.
[14] 卓桂荣, 陈辛波, 余卓平, 等. 全方位线控四轮转向电动汽车设计 [J]. 机械设计,2005, 22(2):29-33.
[15] 宗长富,陈国迎,梁赫奇,等. 基于模型预测控制的汽车底盘协调控制策略 [J]. 农业机械学报,2011,42(2):1-7.
[16] 王 博,罗禹贡,范晶晶,等. 基于控制分配的四轮独立电驱动车辆驱动力分配算法 [J]. 汽车工程,2010,32(2):128-133.
[17] 邓海涛. 四轮转向汽车控制方法研究 [D]. 重庆:重庆大学,2008.
